со со со
СП
Изобретение относится к области управления литьевыми машинами с рычажными гидромеханическими устройствами запирания пресс-форм и может быть использовано в нефтехимической промышленности.
Цель изобретения - обеспечение стабильности технологических режимов литьевой машины.
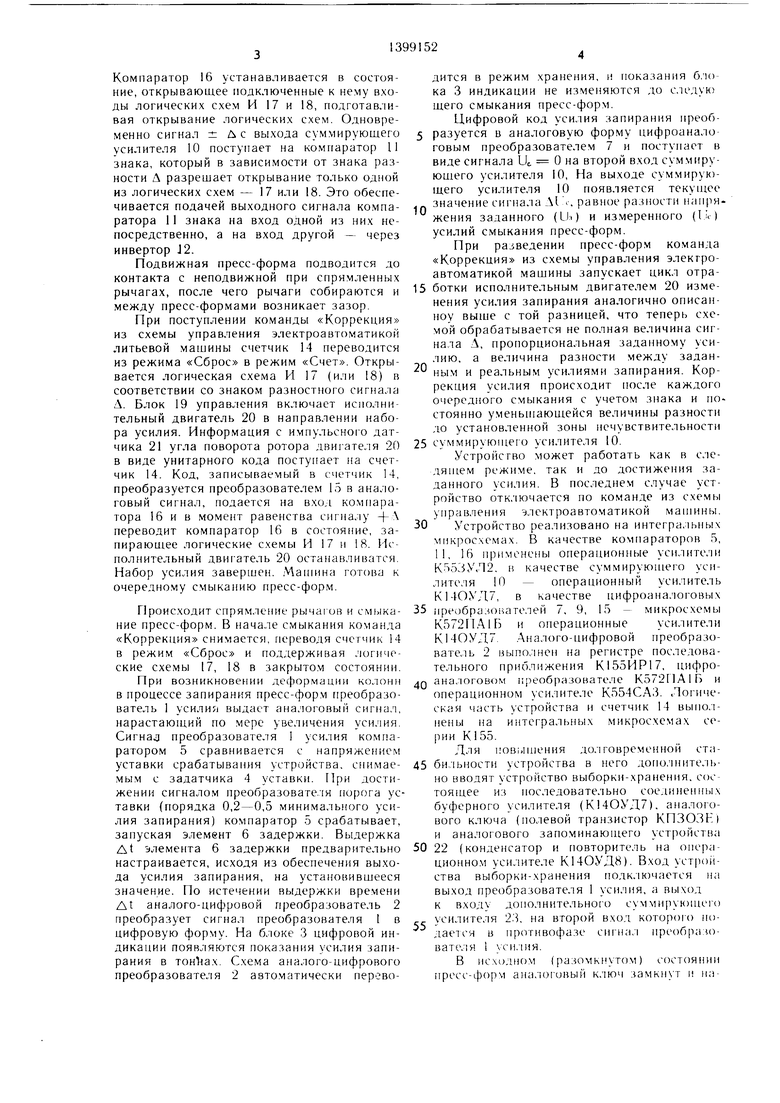
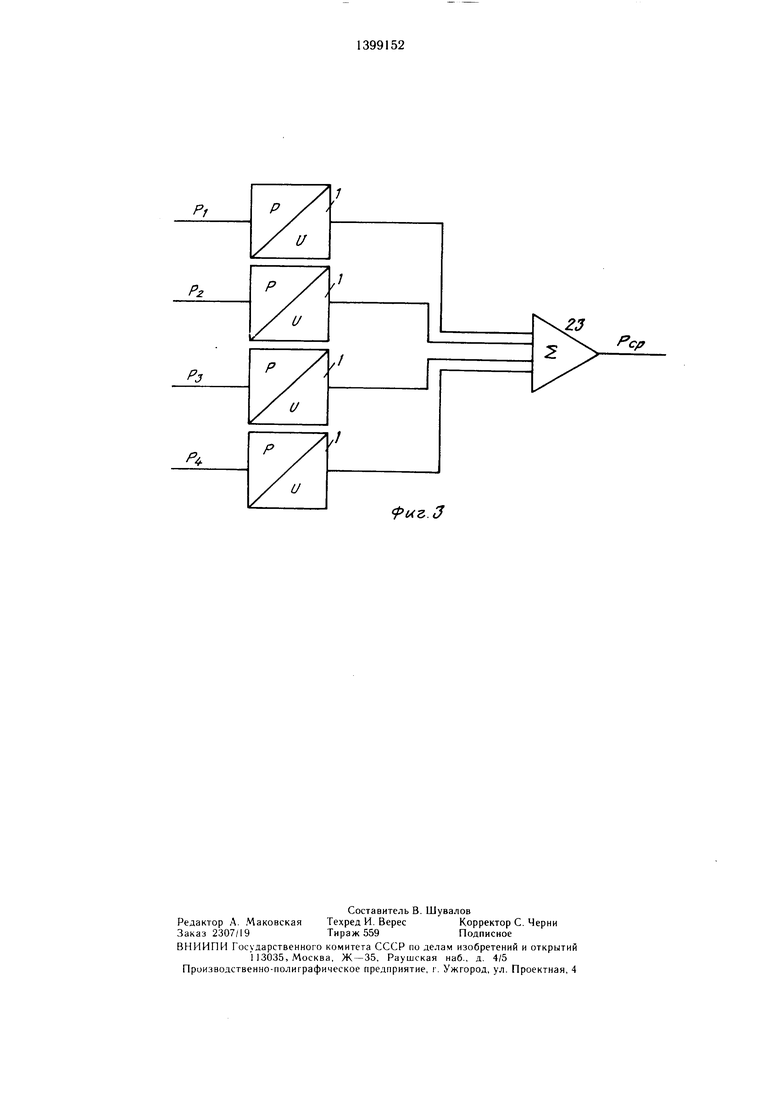
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 -- блок- схема устройства В1)1борки-хранеиия; на фиг. 3 - блок-схема усреднения сигналов преобразователей усилия смыкания.
Устройство управления усилием запирания гидромеханических устройств литьевых содержит преобразователь 1 усилия смыкания в электрический сигнал, соединенные с ним аналого-цифровой преобразователь 2. б.Н. К цифровой Hli,UIKc UnH.
задатчик устаики срабатывания устройства, компаратор ., -.к-М -нт б задержки, ипф- роаналоговый 1реоГ)р.:м)ват(., 1Ь 7. Уси.ми; запирания ; Л laci i ifbiioHoii 8 ного усилия , :;ия пресс-формы. Устройство сс)де 1жи: 1а;/ке циф|)оанало.гон1)1и преобра:«жатс.1 | ) гуммирующий усили- rc. ib 10. Ki)i(.. II iii.iKH, инверго) 12, Eibii:pHMH 4.H-. 1.1. cMt.M inK 14 имиульеон. цифроа1 ; ;|0;Ч1БЫ11 11)еобра К)иа гель In. 1:5 схем VCI |)|;И : 1 на введены комнараюр И, схемы 17. 18 логического И, );IOK П) управлении 1 с:|ол {ительпым двига гелем I t., импуль с11|,1и д;пч),к 1 угл:1 поворота ш- тора испп iii.ri 1.мы(()го 20, iaiK.i- ми}|аю 11( i (юйствг) 22 и гуммцрх г.мний усилиге;1Ь 2. Принцип измерения усилия .а 11II { .-I ни;., основан iiii Kdii ри.с де(|к)рмапи 1 Ha;i) :ч1 ) тих колонн -л. мам.чы при (.-мьичанш формы. ,Ч.Я |;е.:|и -л oaiiui MI (К 1-;; -. г.ч ;. сиие на r.,. 350 KJ К . ; . рительньп1 li. KMs.
ПОДВИЖНЫ |i,Vii
ВаТеЛЯ 1 . Г..:,, U аН1 л У r :i .на (. lloa дсис i . ,: запира)ия npi C;. )M Л 11{ейн1)С см ,...,-1 и. плоскости ,ла 1)гь. и ,а Ko.i Mi-ii.i при Д1. K(),)ib ()T,iH4aeTv i на величн г до i to 50 мкм. Эта величина .MI меряется И1:ду i и(.1ым ipi ()6pa (оват(.ем 1 и 1реобр,ч;п ется в (лсктрический . 1 1ОСТоянно -() тока. )на..Й си- лию запи|)ани .. И.мс1;т;) нду| i нвчого образователя 1 1(;жет Гплть |;им1ч ен любой 1реобра.и)ват(:л) (на1 ример. ( М.))го, тензометрическо Ч) тииа), преобразующий величину деформации в -(.(Сктричсскии , Сигнал 1реобразовате 1Я I усилия ta;чгя на один 1з н одо11 комна.1)атора Л. 1,н лго- рой вход KOTOpof o 1од;1ет1;я ) с за. 4 хчтав -: с| абат:. i-i- ройства. В1,ход комнаратора 5 чорг ;. 6 задержки подключен к у)ав.:|Я1 ;1: сл-
0
5
0
5
o
5
0
входу аналого-цифрового преобразователя 2, на информационный вход которого подается сигнал преобразователя I усилия; выход аналого-цифрового преобразователя 2 подключен к блоку 3 цифровой индикации усилия и цифроаналоговому преобразователю 7. Выход цифроаналогового преобразователя 7 подключен к одному из входов су.ммируюшего усилителя 10, другой вход которого через цифро-аналоговый преобразователь 9 связан с цифровым задатчиком 8 заданного усилия Р,. Выход суммирующего усилителя 10 через вь нфямитель 13 сигнала подключен на вход компаратора 16. Второй вход компаратора 16 через цифроаналого- вый 1реобразователь 15 связан со счетчиком 14 импульсов импульсного датчика 21 угла гюворота ротора исполнительного двигателя 20. Выход компаратора 16 подключен на первые входы каждой из двух логических схем И 17 и 18. Одновременно вход суммирую- uero уси.пителя 10 подключен к ко.мпарато- )у 11 , который непосредственно и 4i pt 3 инвертор 12 подсоединен к вторым н.:м. .) схе.м 17 и соответст- . Иыходы логических схем 17 и 18 под- .ч. ;к)чены на вход блока 19 управления ис- .1нительным двигателем 20, а на третьи ,хо.:ЧЫ логических схем 17 и 18 и на вход R сброса 1 чегчика 14 подается сиг нал «Кор- рекпин:- и схемы управления электроав: ом . lilv ;, . bi-iU)ii .
Pai4 мотри.м работу усгройства с момента HiiMa.ia абора заданн(Л О усилия заиирания
|)ПрМ.
1Ььчв жная 1ресс-форма находится в от- ; .ji Hiiijvi (iiyxi). U(M I 1). ожен1 1, )Ь ча| и ме- . a прямлены. На цифровом з; .да :чике 8 уста 1овлепа требуемая ве- усилия. О етчик 14 импульсов сбро- . ог 1ческая схемы И 17 и 18 закрыты, Р. унрав.чения ис 1олни1ельный дви- 20 (ггключены.
(. ( на задагчике 8, .-.. M иифро-ана.юговогч) преобразова- Jpco6p:i:i} геи в аналоговый сигнал, .|Г; iiocrvMiacr ia один из входов сум- (() уси. И |ЧМй II) в виде сигнала .r... .,(. При отведенном ноложении |,к.чс i})(;pMi, сигнал 1реобразователя 1 уси- 1я ;.) нулю. (Соответственно, равны 1:4.1о Bbi.xcxuioe ) аналого- 1.ифро- isoro реоГ1 1азов; 1е. 2 и входной сигнал 1, { )а вгорС М вхо.ц- суммирующего уси- .шгчмя И), снн.маемь й с выхода цифро- аналогового п|1еобразователя 7. Суммирую- ни1Й уси.1итель И) выделяет разность Д ,j LV, В ис.ходном состоянии подвижной пресс-формы сиг11ал .Л пропорционален заданному усилию.
( ... L В11. i у М .М lp Ще1 О УСН.нгеля 10, 1 ройдя чере 1рецизионный вы- пря-; -с,;ь 13, L нси1менным знаком |о; 1;,( I одн 114 (в ком 1аратора 16,
К
в.ч оде
нулевой
Компаратор 16 устанавливается в состояние, открывающее подключенные к нему входы логических схем И 17 и 18, подготавливая открывание логических схем. Одновременно сигнал Д с выхода суммирующего усилителя 10 поступает на компаратор 11 знака, который в зависимости от знака разности Д разрешает открывание только одной из логических схем - 17 или 18. Это обеспечивается подачей выходного сигнала компаратора 11 знака на вход одной из них непосредственно, а на вход другой - через инвертор J2.
Подвижная пресс-форма подводится до контакта с неподвижной при спрямленных рычагах, после чего рычаги собираются и между пресс-формами возникает зазор.
При поступлении команды «Коррекция из схемы управления электроавтоматикой литьевой мащины счетчик 14 переводится из режима «Сброс в режим «Счет. Открывается логическая схема И 17 (или 18) в соответствии со знаком разностного сигнала Д. Блок 19 управления включает исполнительный двигатель 20 в направлении набора усилия. Информация с импульсного датчика 21 угла поворота ротора двигателя 20 в виде унитарного кода поступает на счетчик 14. Код, записываемый в счетчик 14, преобразуется преобразователем 15 в аналоговый сигнал, подается на вход компаратора 16 и в момент равенства сигналу -|-Л переводит компаратор 16 в состояние, запирающее логические схемы И 17 и 18. Исполнительный двигатель 20 останавливатся. Набор усилия завершен. Машина готова к очередному смыканию пресс-форм.
Происходит спрямление рычагов и см1)1ка- ние пресс-форм. В начале смыкания команда «Коррекция снимается, переводя счетчик 14 в режим «Сброс и поддерживая .чогиче- ские схемы 17, 18 в закрытом состоянии.
При возникновении деформации колонн В процессе запирания пресс-форм преобразователь 1 усилия выдает ана.чоговый сигнал, нарастающий по мере увеличения усилия. Сигнал преобразователя 1 усилия компаратором 5 сравнивается с напряжение.м уставки срабатывания устройства, снимаемым с задатчика 4 уставки. При достижении сигналом преобразователя порога уставки (порядка 0,2-0,5 минимального усилия запирания) компаратор 5 срабатывает, запуская элемент 6 задержки. Выдержка At элемента 6 задержки предварительно настраивается, исходя из обеспечения выхода усилия запирания, на установившееся значение. По истечении выдержки времени At аналого-цифровой преобразователь 2 преобразует сигнал преобразователя 1 в цифровую форму. На блоке 3 цифровой индикации появляются показания усилия запирания в TOHliax. Схема аналого-цифрового преобразователя 2 автоматически перево0
дится в режим хранения, и показания блока 3 индикации не изменяются до следую щего смыкания пресс-форм.
Цифровой код усилия запирания преобразуется в аналоговую форму цифроанало- говым преобразователем 7 и поступает в виде сигнала Uc О на второй вход суммирующего усилителя 10, На выходе суммирующего усилителя 10 появляется текущее значение сигнала .М . равное разности напряжения заданного (Ih) и измеренного (1л) усилий смыкания пресс-форм.
При разведении пресс-форм команда «Коррекция из схемы управления электроавтоматикой машины запускает цикл отра5 ботки исполнительным двигателем 20 изменения усилия запирания аналогично описан- ноу выше с той разницей, что теперь схемой обрабатывается не полная величина сигнала Л, пропорциональная заданному усилию, а величина разности между задан ным и реальным усилиями запирания. Коррекция усилия происходит после каждого очередного смыкания с учетом знака и постоянно уменьшающейся величины разности до установленной зоны нечувствительности
5 суммируюп1его усилителя 10.
Устройство может работать как в сле- дяп1ем режиме, так и до достижения заданного усилия. В последнем случае устройство отключается по команде из схемы управления электроавтоматикой .
0 Устройство реализовано на интегральных микросхемах. В качестве компараторов 5, 11, 16 применены операционные усилители К- 153УЛ2. в качестве суммируюп1его усилителя 10 - операционный усилитель К14ОУ717, в качестве цифроаналоговых
5 преобразо15ателей 7, 9, 15 - микросхемы K572nAlFJ и операционные усилители K14OyZI7. .Аналого-цифровой преобразователь 2 выпо;1неп на регистре последовательного приближения К155ИР17, цифроп аналоговом преобразователе К57211А1В и операционном усилителе К554САЗ. Логическая часть устройства и счетчик 14 вьпюл- нены на интегральных микросхемах серии К155.
Для 1:ов1,1шения долговременной ста5 би.льности устройства в него дополнительно вводят устройство выборки-хранения, состоящее из последовательно соединенных буферного усилителя (К14ОУД7). аналогового ключа (полевой транзистор КПЗОЗН и аналогового запоминающего устройства
0 22 (конденсатор и повторитель на операционном усилителе К140УД8). Вход ycTpoii- ства выборки-хранения подк.чючается на выход преобразователя 1 усилия, а выход к входу дополнительного суммирук)ще1Ч) усилителя 23, на второй вход KOTOpoi o подается в противофазе сигнал преобразователя сил11Я.
В исходном (разомкнутом) состоянии пресс-форм а}1алоговый ключ замкнут и на
пряжение на выходе схемы выборки-хранения соответствует выходному напряжению преобразователя 1 при нулевом усилии, т.е. смещению его из нулевой точки. При снятии команды «Коррекция аналоговый ключ закрывается и запоминающее устройство 22 фиксирует сигнал смещения преобразователя до подачи следующей команды «Коррекция. Поскольку сигнал с выхода схемы выборки-хранения вычитается из сигнала преобразователя 1 усилия, обеспечи- вается автоматическая компенсация смещения его нуля в процессе длительной эксплуатации машины.
Для повыщения точности измерения усилия запирания путем исключения влияния перекосов и люфтов в отдельных колоннах на результаты измерений предусмотрена возможность установки нескольких преобразователей 1 усилия: двух - на диагональных колоннах или четырех - по одному на каждой из колонн.
Сигналы 11реоб 5азователей усилия подаются на суммирующие входы дополнительного суммирующегс; усилителя 24, обеспечивая вычисление среднего значения усилия запирания.
Таки.м образо.м, фиксация усилия запирания осуществляется автоматически через выдержку времени после достижения сигналом преобразователя усилия смыкания заранее установленного минимального уровня, свидетельствующего о начале процесса смыкания.
После достижения заданного усилия устройство 1()зв{).1яет обеспечить автоматическую стабилизацию усилия запирания при следующем смыкании (по результатам предыдущего) 1утем соответствующей коррекции угла поворота ротора исполнительного двигателя. Тем самым обеспечивается стаби.;|ь- ность технологических режимов литья под давлением.
Долговре.менная стабильность работы устройства повышается благодаря автоматической компенса.ии смещения нуля измерительного преобразователя усилия в разомкнутом состоянии пресс-фор.м. Благодаря непосредсгвенному контролю усилия смыкания пресс-форм обеспечивается во всем диапазоне рабочих усилий (40 до 160 т) точность поддержания рабочего усилия ±5%
Формула изобретения
1. Устройство управления усилием запирания гидро.механических устройств литьевых мащин, содержащее исполнительный двигатель перемещения подвиж}юй пресс- формы по направляющим колон11ам. блок управления для включения, отключения и
5
0
5
0
5
0
5
0
5
изменения направления вращения исполнительного двигателя; задатчик величины смещения подвижной пресс-формы, датчик смещения подвижной пресс-формы, счетчик импульсов датчика смещения пресс-формы и первый компаратор сигналов датчика и за- датчика смещения, отличающееся тем, что, с целью обеспечения стабильности технологических режимов литьевой мащины, устройство снабжено установленным на одной из направляющих колонн мащины преобразователем усилия смыкания в электрический сигнал, подсоединенным к одному из входов второго компаратора, другой вход которого подсоединен к задатчику уставки срабатывания устройства, а выход через элемент задержки - к управляющему входу аналого-цифрового преобразователя, информационный вход которого соединен с выходом преобразователя усилия, а выход - с блоком цифровой индикации и первым цифроана- логовым преобразователем, выход первого цифроаналогового преобразователя подключен к одному из входов суммирующего усилителя, другой вход которого через второй цифроаналоговый преобразователь связан с цифровым задатчиком, а выход через вы- гфямитель соединен с одним из входов пер- ) компаратора, другой вход которого через третий цифро-аналоговый преобразователь связан со счетчиком импульсов датчика смеп1ения пресс-формы, а выход подсоединен к первым входам первой и второй логических схем И, причем выход суммирующего усилителя подключен одновременно к входу компаратора знака, выход которого через инвертор непосредственно соединен с вторыми входами логических схем И, третьи входы которых соединены с входом сброса счетчика импульсов, а выходы подключены к блоку управления исполнительным двигателем.
2.Устройство по п. 1, отличающееся гем, что в него дополнительно введено устройство В1.1борки-хранения сигнала нулевого положения гфеобразовате.ля усилия смь кания, управляющий Езход которого подключен к входу сброса счетчика импульсов, информационный вход - к виходу преобразователи УСИЛИЯ с.мыкания, а выход - к одно.му из входов допо.чнительного входного суммирующего усилителя, к другому входу которого подключен сигнал преобразователя усилия смыкания через устройство запоминания.
3.Устройство по п. 1, отличающееся тем, что устройство дополнительно снабжено преобразователями усилия запирания, устанавливаемыми по меньщей мере на двух диагональных направ, 1яющих колоннах, и суммирующим усилителем, к входам которого подключены вы.ходные сигнг1лы преобразователей усилия смыкания.
iд
Г/
F
П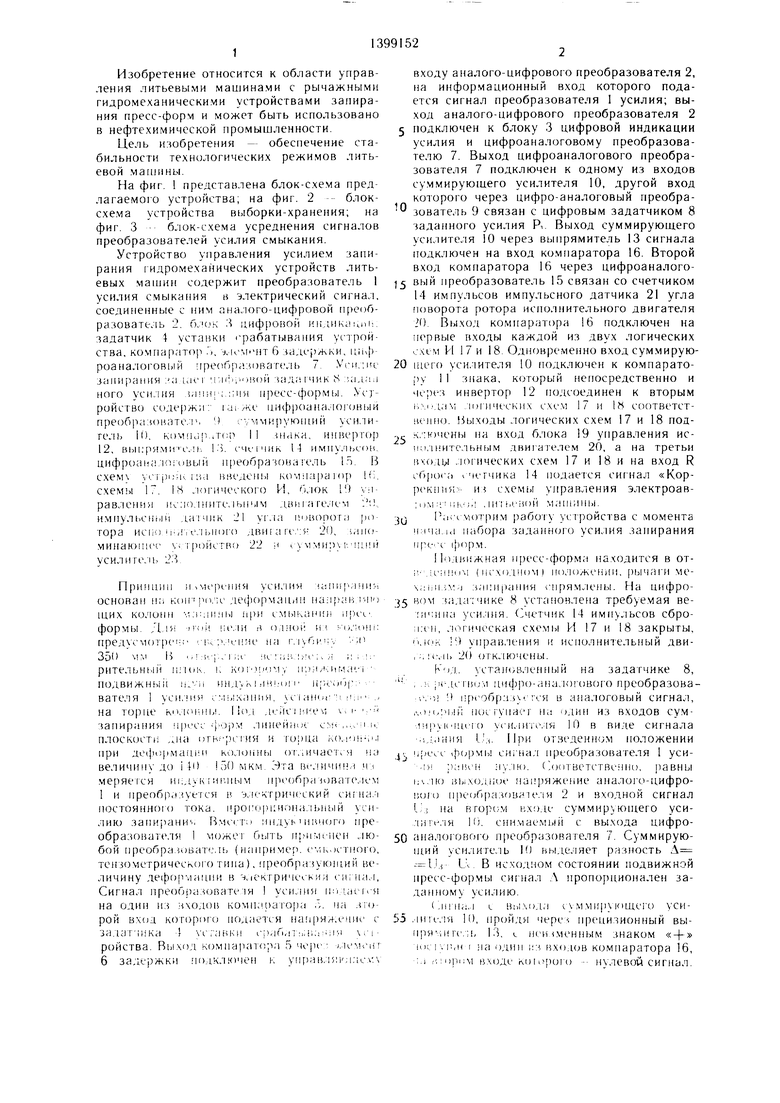
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования температуры | 1986 |
|
SU1403025A1 |
| Устройство для автоматического регулирования температуры | 1988 |
|
SU1645945A1 |
| Устройство для регулирования температуры | 1983 |
|
SU1151932A1 |
| Устройство автоматической фокусировки оптической системы записи-воспроизведения | 1986 |
|
SU1339641A2 |
| Устройство для определения положения подвижного элемента шагового двигателя | 1988 |
|
SU1577067A1 |
| Устройство для управления виброиспытаниями | 1985 |
|
SU1267377A1 |
| Многоканальный широтно-импульсный регулятор температуры (его варианты) | 1981 |
|
SU962883A1 |
| Устройство для регистрации информации | 1982 |
|
SU1167635A1 |
| Устройство для регулирования частоты вращения дизель-генератора | 1985 |
|
SU1377431A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
Изобретение относится к области управления литьевыми машинами с рычажными гидромеханическими устройства.ми запирания пресс-форм. Оно может быть использовано в нефтехимической промышлен ности. Цель изобретения - обеспечение стабильности технологических режимов литьевой машийы. Устройство управления усилием запирания обеспечивает с большой точностью поддержание усилия запирания. Это достигается за счет непосредственного контроля усилия смыкания пресс-форм путем установки на одной из направляюших колонн преобразователя (например, индуктивного) усилия смыкания в электрический сигнал. Сигнал преобразователя усилия, фиксируемый в момент окончания смыкания, сравнивается с усилием, установленным на задатчике. При наличии разности этих сигналов знак ее определяет направление вращения исполнительного двигателя. Величина разности определяет угол поворота ротора. Поворот происходит до тех пор, пока сигнал датчика угла поворота не станет равным величине разности сигналов датчика и задатчика усилия. 2 з.п. ф-лы, 3 ил. (О (Л
Коррекция
5
13
15
18
Zt
20
J
2
pub.Z
23
Pep
f(z.3
| Патент США № 4301100, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
