со
CD Г О 00
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления положением объекта | 1990 |
|
SU1788514A1 |
| Устройство управления положением объекта | 1990 |
|
SU1783474A1 |
| Цифровой измеритель составляющих комплексных сопротивлений | 1987 |
|
SU1456907A1 |
| Устройство для циклового программного управления манипуляторами | 1982 |
|
SU1176303A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Устройство для автоматического выбора направления движения объекта | 1977 |
|
SU722828A1 |
| ИЗБИРАТЕЛЬНОЕ УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВЫЗОВА ОТ АБОНЕНТА | 1998 |
|
RU2136050C1 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ | 1993 |
|
RU2092903C1 |
| Устройство управления фотозатвором | 1982 |
|
SU1067469A1 |
| Устройство для измерения параметров дыхания | 1990 |
|
SU1803037A1 |

Изобретение относится к автома тике и может быть использовано в позиционнь1х системах управления, предназначенных для перемещения объекта в заданное положение . Цель изобретения - расширение эксплуатационных возможностей устройства управления положением объекта за счет введения дополнительного режима управления. Устройство управле шя положением объекта содержит счетчик импульсов 1, дешифратор 2, блок 3 ввода адреса, элемент И 4, блок управления 9, блок сравнения 1Я, инвертор 16, элемент 211-.И-.ИЛИ 17, соглапуюн ие усилители 10-12, приводы 13, 14 датчики зоны установки 7, рабочей зоны 8, начального положение 6, перемещения 5, переключатель режимов 15. 3 ила (Л
. 1
Изобретение относится к автоматике и может использовано в поэи циониых системах управления, предназначенных для перемещения объекта в 9 ад энное пол ожеш е,
Цель изобретения расширение эксплуатационных возможностей устройства управления положением объекта.
На изображена функциональная Q адрес положения объекта, который в
состоянии Работа и Перемещение в рабочую зону (фиг«3) совпадает с адресом, установленным в блоке 3 установки адреса, Новым адресом д блока 3 является любой адрес, отлич 1ЦИЙСЯ от ранее установленного.
схема предпагаемого устройства; па фиг,2 - принципиальная схема блока упраалеяия; на фиг.З - диаграмма работы устройства.
Устройство содержит последователь-t5 но соединенные счетчик 1 импульсов, i дешифратор 2, блок 3 ввода адреса/ I элемент И А, датчик 5 перемещешчя I датчик 6 начального полокетшя, соеда- I ненный с Н-входом счетчика датчик 20 7 яомы установки и датчик 8 рабочей , соединенные с ;. входами блока
9 управления, выходы которого через с огласуюпцте усилители 10 2 соединены с приводами 3 и 14 , переключатель
15режимов соединен с пятым входом блока управления, входом инвертора
16и третьим входом элемента ШМ 17, вых-од которого соедлнен с седьмым входом блока 9 управлега-1я н первым С нходон счет шка I, второй С -вход -которого соедг нен с датчиком 5 перемегцения, второй вход элемента 2H--2ii-2 ШД-1 17 соедннеи с вьпсодом блока 18 сравнения., В-пход которого соединен с выходом счетчика 1, выход инвертора 16 соединен с шестым входом блока 9 управления, и первым входом элемента 2 Ь-2И 2 ИЛИ 17, четвертый вход которого соединен с выходом эле- мента И Ал, второй вход блока 9 управления соединен с входом 19 внешнего управления Перемещение в зону установки четвертый вход блока 9 управления соединен с входом 20 внешнего управления Перемещение в рабочую зону, А- вход блока 18 сравнения соединен с входом 21 внешнего управления Код адреса, при зтом выход датчика
7 зоны установки соединен с выходом И, внепшего.управления Объект в зоне установки, выход датчика Я рабочей соединеи с вьгх;одом 23 инега- него управлнн ия Объект i рабочей зоне, выход элемента ИШ 17 совД1- }1ен с выходом 2./4 вг е1 гнего управ ления Иасравнение, переключатель 15 соедашен также с ныУчОдом 25 вненг- него упраппеипн Яиг.тпнционной упрап
ление, блок 9 управления содержит кнопки 26 и 27 управления, соединенные с входами элементов ИЛИ 28 и 29, выходы которых соединены с RS-тригге- ром 30, элемент И 31, входы которого соединены с входами элементов ИЛИ 28 и 29 и йходом триггера 30,
В счетчике 1 хранится текущий
Q адрес положения объекта, который в
t520
30
35
40
25
д
состоянии Работа и Перемещение в рабочую зону (фиг«3) совпадает с адресом, установленным в блоке 3 установки адреса, Новым адресом для блока 3 является любой адрес, отличаю 1ЦИЙСЯ от ранее установленного.
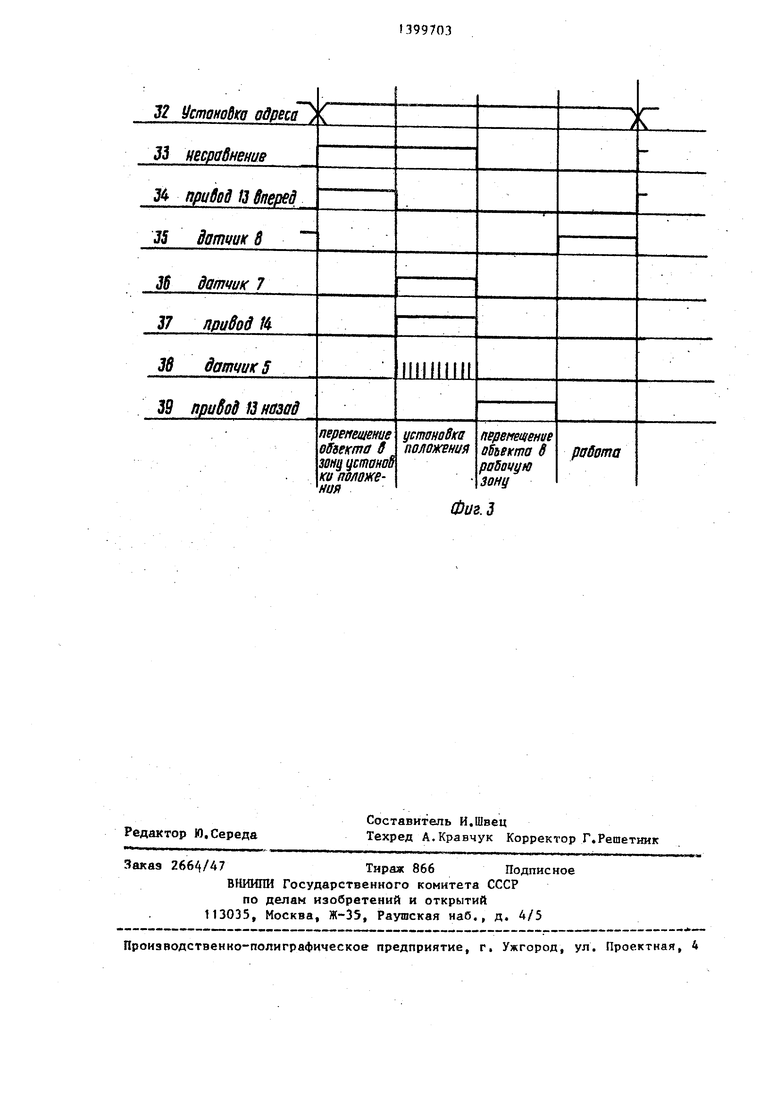
На фиг.З обозначено: 32 - сигнал установки адреса} 33 - сигнал на вы ходе элемента 2И-7.И-7. ИЛИ 17; 34 - сигнал на привод 13 Вперед ; 15 - сигнал с вьгхода датчика Я рабочей эо1-5Ь ; 36 - сигнал с выхода датчика 7 зоны установки; 37 - сигнал на привод 14; 38 - сигнал с датчика 5 перемещения; 39 - сигнал на привод 13 Назад.
Устройство работает следующим образом.
Начальная установка счетчика 1 производится следующим образом. При вклю че1ши устройства счетчик 1 устанавливается в произвольное состояние, например, не совпадающие с адресом, установленным в блоке 3, Элемент И 4 вьфабатьгаает сигнал Несравнение, включается привод 13 и объект перемещается из рабочей зоны в зону уста- новки, срабатывает датчик 7 зоны установки, привод 13 выключается, привод 14 устанавливает объект в положение, задаваемое блоком 3,
При прохождении положения принятого за начальное, датчик 6 начального положения вырабатывает сигнал, ycta- навливагопщй счетчик i в состояние О, и перемещение объекта продолжается до совпадения состояния счетчика 1 с адресом,, установленным в блоке 3,
При местном управлении переключатель 15 находится в разомнкутом положении, на входе инвертора и на линии местного (ручного управления устанавливается логическая 1, а на выходе инвертора 16 и на линии дистан- ционного управлеш1я - логический О,
В счетчике 1 хранится адрес позиции объекта в двоично-десятичном коде, Деганфратор 2 преобразует двоично де50
i39
СЯТИЧ ГЫЙ код в позиционный, KOTOpbrfi
поступает в блок 3 ввода адреса. При. установке в блоке 3 нового адреса зяе мент И 4 через элемент 1Ш- 17 вырабатьгеает сигнал 33 Несравка п.а % поступающий в блок 9 управления и кв первый С-вход счетчика f, разрешающего прохождение импульсов 38 от датчика 5 перемещения. Блок 9 управле1шя вырабатывает сигнал 34, который через согласующий усилитель JO включает привод 3, перемещающий объект э зону установки. При достижении зонь) установки с датчика 7 зоны установки на первый вход блока 9 управления посту пает сигнал 36, который выключает привод 13, через элемент И 31 разрешает прохождение сигнала 33 на согласующий усилитель 19. и включает привод 13, устанавливающий объект в заданное положение, Пря установке объекта в за данное положение рабочий орган приво да 13 перемещает объект на один шаг и воздействует на датчик 5 перемеще- кия, импульсный сигнал 38 с которого поступает на счетный вход счетчика 1. Перемещение производится до тех пор, пока код адреса в счетчике 1 совпадает с адресом, установленным в блоке 3 ввода адреса. Если при установке объекта новый адрес меньше текущего, то объект будет проходить начальное положение, в котором срабатывает датчик 6 начального положения и сбрасы- вает счетчик 1 в О, При совпадении кода адреса в счетчике 1 с адресом, установленным в блоке 3 установки адреса, элемент И А элемента ИЛИ снимает сигнал Несовпадение, блок 9 управления снимает сигнал 39, вк.гао- через согласующий усилитель 11 привод 13, возвращающий объект в рабочую зону. По достютении рабочей зоны срабатывает датчик Я рабочей зо-мы, по его сигналу блок 9 управления снимает сигнал 39 и через согласующий усилитель 11 выключает привод 13. Объект находится в рабочей зоне до тех пор, пока в блок 3 ввода адреса не будет введен новый адрес, т,е, элемент И А не вырабатывает сигнал 33 Несравнегше,
В технологических целях предусмотрено перемещение объекта из рабочей зоны в зону установки и обратно кнопками 26 и 27.
В режиме дистанционного управления переключатель 15 замкнут, на входе .
инверт ора 16 и линии NsecTiioro управления -устанавливается логический О, а Ни выходе инвертора 16 и линии дистанционного управления - логическая I, Отличие режима дистанционного управления от режима внешнего управления состоит в том, что сигналы внещнего управления Верх, Вниз и Код адреса поступают в устройств управления положением объекта с него устройства управления чегез входы 19-21, например, микро-ЗКМ Сигн;и 33 Несравнение вырабатывается в этом случав блоком 1Р сравнения и через второй вход элемента 2И-2И-2 ИГО 17 поступает в блок 9 управления, при этом сигналы о состоянии устройства с датчиков 7 и 8 переключателя 15, элемента 2И-2И 2 RTOi 17 поступают во внешнее устройство упрнвлегшя череэ выходы соответствеяно, Формула изобретения
Устройство управления положением объекта, содержащее датчик начального положения, выход которого подклю чен соответственно к R-вкоду счетчика импульсов, выходы которого иены с входамн детифратора, выходом подключенного к входам элемента И, а также датчики зоны установки и рабочей зоны объекта, соединенные выходами с соответствующими входами блока управления, выходы которого через согласующие усилители подключены к первому и второму приводам, а блок управления содержит НЯ-триггер, прямой и инверсный выходы которого подключены к первому vt второму выходам блока управления, nepswii и второй элементы ИЛИ и элемент И, выход которого соединен.с третьим выходом блока управления, выходы элементов ИЛИ . подключены к первым входам RS-тригге- ра, S-входы которого соединены с пер- вьи входом элемента И и с первым входом блока управления; а R-входы - с вторым входом блока управления, первые входы элементов ИЛИ соединены с первой и второй кнопками управления, а вторые входы объединены и соединены с вторым входом элемента И и с третьим входом блока управления, отличающееся тем, что, с целью расширрлгая эксплуатационных возможностей устройствл управления положением объекта за счет оведеиия дополнительного режима управления, н
аведе1 Ы переключатель режимов, И1|шертор, элемент 21Ь 2И 2ШШ и блок с); авпеШ1Я первый вход которого сое- с входом внешнего У11равле5шя, второй вход - с выкодом счетчика им ttynttcos, а вгокод - с первыь входом эленента 2{Н2И 2Нда второй нход ко- тОрого подкгаочйн к четвертому вкоду бЛокй управления и через ннвартор к пятому входу блока управдега Я, к прраому йыкоду внешнего управления, к третье(у вкоду элемента 21Ь2И 2ИЛИ я| к переключателю ретошов, четвертый элемента 2lb2IH JUIIi с| выходом элемента И а выход с третьим входом блока управления,, е njepBbM С-вкодом счатчнка т пульсов и
26 Mffpi
.J.
с вторым выходом внешнего управления выход датчика перемещения объекта соединен с вторым С входом счетчика
(шпульсов, шестой и седьмой входы
блока управления соединены с соответствующими внешним входами устройства, д первый и третий выходы блока управления подключены соответственно
к третьему и четвертому внешним выходам устройства, в блоке управления третий вход соединен с вторым входом элемента И блока управления четвер- вход - с вторьми входами RS
триггера пятый вход - с третьими входами RS-триггера, шестой и седьмой входь соотнетственно с четвертым и пять входами НБ-трнггера.
Фиг.З
