запуска коммутатора соединен с вьтхо- тпкже выход запуска коммутатора дом запуска панели управления, соединены с внешним- оборудовапусковон, остановочный выходы, а нием.
1 7(1303


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления трехфазным асинхронным электродвигателем | 1990 |
|
SU1818674A1 |
| Устройство оперативной связи с управляющими программами | 1981 |
|
SU970351A1 |
| Многоканальный программируемый аналого-цифровой преобразователь | 1985 |
|
SU1266002A1 |
| Многоканальная система управления распределением ресурсов в вычислительном комплексе | 1982 |
|
SU1269142A1 |
| Устройство для регистрации временных и информационных процессов | 1986 |
|
SU1363258A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| РЕГИСТРАТОР ПАРАМЕТРОВ АВАРИЙНЫХ СИТУАЦИЙ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ | 2008 |
|
RU2381549C2 |
| Устройство управления процессора | 1988 |
|
SU1670686A1 |
| РЕГИСТРАТОР ПАРАМЕТРОВ АВАРИЙНЫХ СИТУАЦИЙ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ ПОВЫШЕННОЙ ТОЧНОСТИ (ВАРИАНТЫ) | 2008 |
|
RU2376625C1 |
| Программируемый контроллер | 1983 |
|
SU1238032A1 |

УСТРОЙСТВО ДЛЯ ЦИКЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ, содержащее панель управления, запоминающее устройство, блок согласования, блок управления, состоящий из последовательно соединенных многовходового элемента И, счетчика, дешифратора , а также генератора импульсов, триггера и компаратора, выходы которых соединены с входами элемента И, при этом другие входы элемента И связаны с. внешним оборудованием, входы триггера и установочный вход счетчика соединены с пусковым выходом панели управления, одни входы компаратора соединены с информационным выходом запоминающего устройства, а другие - с сигнальным выходом блока согласования, входы которого соединены с датчиками манипулятора и технологического оборудования, при этом выходы дешифратора соединены с программным адресным входом запоминающего устройства, а также блок усилителей, выходы которого соединены с приводами манипулятора и технологического оборудования, отличающееся тем, что, с целью расширения области применения устройства, в него введены коммутатор и блок оперативного прерывания, состоящий из элементов 2И-НЕ, триггеров, многовходового элемента И-НЕ, инвертора и элементов 2И-2ИИЛИ-НЕ, при этом выходы элементов 2И-НЕ подключены к первым установочным входам триггеров, вторые установочные входы которых объединены, первые выходы соединены с входами элемента И-НЕ, выход которого соединен с инвертором и с первыми входами элементов 2И-2И-ИЛИ-НЕ, выход инвер(Л тора соединен с вторыми входами элементов 2И-2И-ИЛИ-НЕ, выходы которых соединены с входами блока усилителей, третьи входы элементов 2И-2ИИЛИ-НЕ соединены с выходом аварийного слова запоминающего устройства, четвертые входы элементов 2И-2И-ИЛИ НЕ соединены с командным выходом заа поминающего устройства, вторые выхосо ды триггеров соединены с аварийным адресным входом запоминающего устрой00 ства, объединенные установочные входы триггеров соединены с установочным выходом панели управления, первые входы элементов 2И-НЕ соединены с выходом состояний блока согласований, вторые входы элементов 2И-НЕ соединены с информационным аварийным выходом запоминающего устройства, выход инвертора соединен также с одним из входов элемента И блока управления и выход элемента fi-HE соединен с аварийным входом коммутатора, вход
1
Изобретение относится к робототехнике, конкретно к устройствам управления промьпплеиными роботами.
Цель изобретения - расширение области применения устройства.
На фиг.1 представлена блок-схема устройства; на фиг. 2 -- функциональная схема блока оперативного прерывания; на фиг.З - функциональная схема блока управления; на фиг.А- одна из возможных схем коммутатора.
Устройство содержит блок 1- управления, блок 2 усилителей, запоминающее устройство 3, панель 4 управления, блок 5 согласования с датчиками манипулятора и технологического оборудования, блок 6 оперативного прерывания, коммутатор 7.
Выходы блока 2 усилителей цепью 8 соединяются- с приводами манипулятора и командньгми цепями технологического оборудования, а входы цепью 9 - с командными выходами блока 6 оперативного прерывания.
Адресный выход блока 6 цепью 10 соединен с аварийным адреснь м входом запоминающего устройства 3, блокировочный выход цепью 1I - с блокировочным входом блока 1 управления, аварий . ный выход цепью 12 - с аварийным входом коммутатора 7.
Установочный вход блока 6 цепью 1 3 соединен с установочным выходом панели 4 управления, вход состояний цепью 1Д - с выходами состоянирЧ блика 5 согласования, информационный аварийный вход цепью 15 - с информационным аварийным выходом запоминающего устройства 3, вход аварийного слова цепью 16 - с в1.1ходом аварийного словгзапоминаюп;его устройства 3, командный вход цепью 17 - с командным выходом запоминающего устройства 3.
Информационный выход запоминающего устройства 3 цепью 18 соединен с информационным входом блока 1 управления, а программны) адресный вход
запоминающего устройства 3 цепью 19с адресным выходом блока 1 управления.
Пусковой вход блока 1 управления соединен цепью 20 с пусковым выходом панели 4 управления, сигнальный вход цепью 21 - с сигнальным выходом блока 5 согласования. Контрольный вход блока 1 соединен цепью 22 с технологическим оборудованием, и блок получает по нему сигналы о готовности оборудования к работе.
Входы блока 5 согласования соединены цепью 23 с датчиками манипулятора и технологического оборудования.
Вход запускакоммутатора 7 соединен цёггью 24 с выходом запуска панели 4 управления. Пусковой выход коммутатора 7 цепью 25 соединен с коммутационными цепями технологического оборудования, осуществляющими его включение; остановочный выход цепью 26 - с коммутационными цепями технологического оборудования, осуществляющими его отключение; выход запуска цепью 27 - с коммутационными элементами других аналогичных устройств управления роботами при работе их в едином робототехническом комплексе.
Блок 6 оперативного прерывания содержит N-разрядный регистр 27, выполненньм на триггерах 28, группу 29 содержащую N логических элементов 30 2H-IIK, группу 31, содержащую N элементов 32 2И-2И-11ПИ-НЕ, логически элемент 33 N И-ПЕ и инвертор 34. Число N определяется максимально возможнЕ.гм числом технологического оборудования, с KOTOjibiM работает данное устройство управления.
S-входы триперов 28 регистра 27 соединены с выходами логических элементов 30 группы 29. R-входы триггеров 28 соединены вместе и образуют установочн1.п1 вход блокг. 6 оперативного прсрьшання, соединенный с цепою 13. Последняя служит для установки триггеров 28 в исходное состояние с панели 4 управления. Q-выходы триггеров 28 образуют адресный выход блока 6 и соединены с цепью 10. Код выставлечньй на этом адресном выходе по цепи 10, поступает в запоминающее устройство 3 и вызьшает из него аварийные слова, определяющие аварийные конфигурации манипулятора и аварийную .реакцию технологического оборудования. Первые входы элементов 30 группы 29 образуют вход состояний блока 6 и соединены с цепью 14, по которой в блок 6 Оперативного прерывания через блок 5 согласования поступает информация о состоянии технологического оборудованияj т.е. оборудование находится в исходном состоянии или в рабочем цикле. Вторые входы элементов 30 образуют информационный вход блока 6 и соединены с цепью 15, по которой из запоминающего устройства 3 приходит в блок 6 информация о возможности возникновения аварийной ситуации при взаимодействии манипулятора и технологического оборудования. Информация содержится в специальных разрядах- выполняемого в данньй момент робототехническим комплексом командного слова. Q-вьгходы триггеров 28 регистра 27 соединены с соответствующими входами логического элемента 33 N И-НЕ. Выход элемента 33 соединен с входом инвертора 34 и с одним из входов элементов 32 группы 31. Выход инвертора 34 соединен с вторыми входами элементов 32, третьи входы которых образуют в блоке 6 вход аварийного слова и соединены с цепью 16. По цепи 16 из запоминающего устройства 3 приходит в блок 6 аварийное слово, определяющее аварийную конфигурацию манипулятора и. аварийную реакцию технологического оборудования. Четвертые входы элементов 32 образуют в блоке 6 вход командного слова и соединены с цепью 17, по которой в блок 6 из запоминающего устройства 3 поступает командное слово, задающее работу приводов манипулятора и технологического оборудования. Вьгходы элементов 32 группы 31 образуют командный выход блока 6 и соединены с цепью 9, по KOторой на блок 2 усилителей поступает информация о тОм, какие приводы манипуляторов должны в настоящий момент 3034 работать и какие команды должно выполнять технологическое оборудование. Выход инвертора 34 образует блокировочный блока 6 и соединен с цепью I 1 , по которой на блок 1 управления я.оступает при возникновении аверийной ситуации сигнал, запрещающий дальнейшее выполнение программы работы устройством управления. Выход логического элемента 33 также образует аварийный выход блока 6 и соединен с цепью 12, по которой на коммутатор 7 поступает сигнал на аварийное отключение соответствующего технологического оборудования. j Блок управления (фиг.З) содержит дешифратор 35, счетчик 36, логический многовходовый элемент И 37, генератор 38 импульсов, триггер 39, компаратор 40, выполненный, например, на элементах ИСКЛЮЧАЮЩЕЕ ИЛИ. Выходы дешифратора 35 образуют адр§сный выход блока 1 управления и соединены с цепью 19, по которой на запоминающее устройство 3 поступает адрес программного командного слова. Входы дешифратора 35 соединены с выходами счетчика 36, Информационный вход блока 1 образован первыми входами компаратора 40, которые соединены с цепью 18. По цепи 18 из запоминающего устройства 3 на блок 1 управления приходит информация, которую необходимо проконтролировать для перехода на следующий шаг программы. Вторые входы компаратора 40 образуют сигнальный вход блока 1 и соединены с цепью 21, по которой через согласующий блок 5 приходит информация о состоянии манипулятора и технологического оборудования. Входы триггера 39 и вход Сброс счетчика 36 образуют пусковой вход блока 1 и соединены с цепью 20, по которой на блок 1 управления приходят с панели 4 управления сигналы на останов и запуск программы. Выходы триггера 39 и компаратора 40 соединены с входами элемента 37. Часть входов элемента 37 образуют контрольный вход блока 1 и соединены с цепью 22. Один из входов элемента 37 образует блокировочный вход блока 1 и соединен с цепью 11. Один из входов элемента 37 соединен также с генератором 38 импульсов..
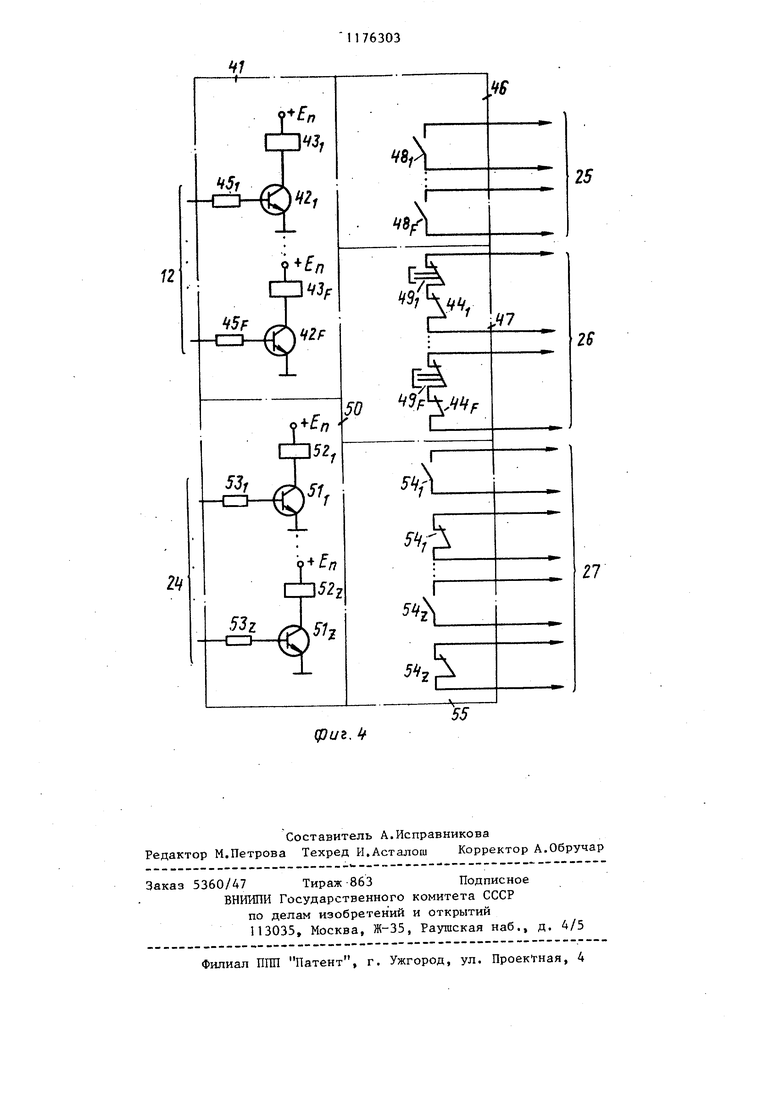
Коммутатор 7 содержит группу 41 ключей, выполненных по стандартной схеме на транзисторах 42 в количестве равном F, где F - соответствует числу единиц технологического оборудования, которое необходимо отключать при воэникновении аварийной ;итуации ,
В коллекторных цепят транзисторов 42 включены обмотки реле 43, которые контактами 44 отключают технологическое оборудование.
В базовых цепях транзисторов 42 стоят базовые резисторы 45, вторые концы которых образуют аварийный вход ко1.1мутатора 7 и соединены с цепью 12, Имеются группы 46 и 47 .коммутационных элементов 48 и 49, служащие для ручного включения и отключения технологического оборудования.
Выходы элементов 48 группы 46 образуют пусковой выход коммутатора 7 и соединены с цепью 25, а выходы элементов 49 группы 47 образуют остановочный выход коммутатора 7 и соединены с цепью 26. Вторая группа 50 ключей-также выполнена по стандартной схеме на транзисторах 51 в количестве, Z, где Z соответствует числу команд, необходимому для передачи на другой аналогичный пульт управления второго манипулятора, если он есть в составе робототехнического комплекса.
,В коллекторных цепях транзисторов 51 включены обмотки реле 52. В базовых цепях транзисторов 51 стоят базовые резисторы 53, вторые концы которых образуют запуска коммутатора 7 и соединены с цепью 24. Последняя соединяет ключи группы 50 с органами управления на панели 4 управления.
Данная группа команд производит дублирование команд, поступающих с панели 4 управления на устройство управления, например, команд Пуск, Стоп и т.д., и передает их на другое аналогичное устройство- управления для возможности осуществления управления робототехническим комплексом, в составе которого два устройства управления (с любого из них).
Контакты 54 объединены в контактную группу 55, а их выходы образуют выход запуска коммутатора 7 и соеди-нены с цепью 27, по которой проходят
дублирующие сигналы с -устройства управления на второе такое же устройство.
5 Состав остальных блоков не раскрывается, так как они не являются предметом изобретения и могут быть заимствованы из прототипа.
Работа устройства для циклового
0 программного управления представлена на примере робототехнического комплекса, состоящего из технологического оборудования (ТО) и двух манипуляторов, а следовательно, и двух устройств
5 циклового программного управления, которые связаны между собой.
Для включения комплекса с коммутатора 7 по цепи 25 на оборудование комплекса коммутационньми элементами 48 группы 46 подаются команды
Включение ТО. После включения все - задействованные единицы ТО устанавливают сигналы логической единицы на контрольном входе блока 1 управления,.
5 поступающие по цепи 22 и подтверждающие включение оборудования.
Кроме того, должна быть произведена установка в исходное состояние блока 6 оперативного прерывания и
0 счетчика 36 блока 1 управления. Для этого с панели 4 управления подается сигнал Сброс, который поступает по цепи 13 на установочный вход блока 6 оперативного прерывания и по цепи
5 20 - на вход Сброс счетчика 36, устанавливая триггеры 30 регистра 29 и счетчик 36 в исходное состояние.
После установки блока 6 оперативного прерывания в исходное состояние
0 на блокировочный вход блока 1 управления по цепи 11 приходит сигнал логической единицы, разрешающий работу блоку 1 управления. После установки счетчика 36 в исходное положение сигналом Сброс на запоминающее устройство 3 по цепи 19 с выхода дещифратора 35 поступает начальный адрес программы работы комплекса, вызывающий командное слово исходного состояния,
0 которое поступает по цепи 17 на блок 6 оперативного прерывания, а оттуда по цепи 9 - на блок 2 усилителей и, проходя по цепи 8, попадает на манипулятор и технологическое оборудование, и вызывает установку ТО и манипулйтора в исходное положение. По цепи 18 это командное слово поступает на компаратор 40 -блока 1 управления. 71 Компаратор сравнивает информацию при шедшего командного слова и информацию, поступившую через блок 5 согласования по цепи 18 от датчиков манипулятора и технологического оборудования . Если манипулятор и ТО команды выполнили, то информация, поступившая с датчиков, соответствует командному слову и на выходе компаратора формируется сигнал логической единицы, поступающий на элемент И 37. Блок 1 управления готов к работе в автоматическом режиме, при этом на всех входах злемента И 37- (.за исключением двух входов ) установлены сигналы логической единицы. На один из оставшихся входов поступают импульсы с ге нератора 38, а второй, оставшийся вход соединен с выходом триггера 39 и на нем держится сигнал логического нуля. По приходу по цепи 20 сигнала Пуск с панели 4 управления триггер 39 переворачивается и на еговыхо де устанавливается сигнал логической единицы. Первый пришедший после этого импульс генератора формирует импульсы на выходе элемента И 37 и изменяет состояние счетчика 36 и на выходе де шифратора 35 формируется адрес следующего командного слова. Новое командное слово поступает на компаратор 40 блока 1 управления и, если его информация отличается от информации предыдущего командного слова, сигнал компаратора убирает ло гические единицы с соответствующих входов элемента И 37, запрещая прохождение импульсов с генератора 38, Это значит, что состояние счетчика не изменится, а следовательно, новое командное слово не будет вызвано из запоминающего устройства 3 до того момента, пока датчики не подтвердят выполнения предыдущего командного слова манипулятором и технологическим оборудованием. Сигналы Сброс и Пуск с панели 4 управления по цепи 24 поступают на ключи группы ., вызывая срабатывание соответствующих реле 52, которые контактами 54 по це пи 27 передают эти команды на устрой ство циклового программного управления второго манипулятора, обеспечива его исходное положение и запуск. 3 Таким образом, введение дубпирот ния кома11Д позволяет производить ил чальную установку и запуск комплексп с любого из имеющихся в комплексе устройств управления. После выполнения манипулятором и ТО вызванного командного слова блок 1 управления посылает по цепи 19 в запоминающее устройство 3 адрес следумщего командного слова. В некоторые моменты вьшолнения программы возможны такие взаимодействия манипулятора и ТО, которые в случае -аварийной работы оборудования могут привести к поломке манипулятора и самого технологического оборудования. Например, самоход пресса, когда рука манипулятора находится в зоне штампа. Информация о таком опасном взаимодействии записана в специальном разряде командного слова и при вызове соответствующего командного слова по цепи 15 поступает на информационный аварийный вход блока 6 оперативного прерьгоания. Если авария не происходит, то командное слово сохраняется на командных выходах блока 6 оперативного прерывания, т.е. на выходах элементов 32. Если же возникает аварийная ситуация (пошел пуансон пресса, когда рука робота под прессом), то с датчика, установленного на потенциально опасном элементе технологического оборудования (например, на шатуне пресса), поступает сигнал о несанкционированной, аварийной работе ТО. Этот сигнал через блок 5 согласования поступает по цепи 14 на вход состояний блока 6 оперативного прерывания, а затем на один из элементов 30. Сигнал об отказе поступает раньше, чем происходит авария, так как быстродействие датчика выше, чем технологического оборудования. Таким образом на один из элементов 30 поступают сигналы о возможности аварийной ситуации и о том, что аварийная ситуация происходит. Тогда нл выходе соответствующего элемента 30 возникает сйгнял, поступающий на соответствующий триггер 28 регистра 27 и переводящий его во второе положение . На адресном выходе блока 6 оперативного, ттрсрывания ф эрмируется адрес аварийного слова, которое задает реакцию манипулятора и техиологического оборудования на возникновение данной аварийной ситуации. По цепи 10 адрес поступает на аварийный адресный вход запоминающего устройства 3 и вызьшает из него соответствующее аварийное слово, которое поступает на группу 31 элементов 32 по цепи 16.
Одновременно сигнал со сработавшего триггера 28 поступает на элемент 33, который изменяет сигнал на выходе и разрешает прохождение на командный выход блока 6 оперативного прерывания аварийного командного слова, поступившего по цепи 16. Этот же сигнал с выхода элемента 33, проходя через инвертор 34, поступает на другие входы элементов 32 и запрещает прохождение на командный выход блока 6 оперативного прерывания командного слова, поступившего по цепи 17. Одновременно сигнал с выхода элемента 33 по цепи 12 поступает на группу 41 ключей, вызывая срабатьгаание реле 43, которые контактами 44 по цепи 26 производят выключение технологического оборудования. Сигна с выхода инвертора по цепи 11 поступает на блок 1 управления и устанавливает в состояние логической единицы один из входов элемента 37.
Этим запрещается прохождение на счетчик 36 сигналов тактовой частоты генератора 38, а следовательно, не происходит дальнейшая отработка программы.
Аварийное командное слово с командного выхода блока 6 оперативного прерьгоания по цепи 9 поступает на блок 2 усилителей, которые по цепи 8 вызывают срабатьгоание соответствующих приводов манипулятора и технологического оборудования, обеспечивая их реакцию на возникшую аварийную ситуацию. Например, заставляют руку манипулятора вьщергивать из под пресса с одновременным поворотом ее в сторону.
После устранения причин аварии устройство управления сигналом Сброс с панели 4 управления устанавливается в исходное положение и опять готово к автоматической работе.
Наличие блока оперативного прерывания позволяет избежать поломок манипуляторов и технологического оборудования при возникновении аварийных ситуаций, когда есть взаимодействие манипулятора и оборудования.
(Риг.2
20
22
11
13
фиг. J
| Белянин П.Н | |||
| Промышленные роботы, М.: Машиностроение,1975, с | |||
| 0 |
|
SU201230A1 | |
| Юревич Е.И | |||
| и др | |||
| Системы управления промышленными роботами и манипуляторами | |||
| Л | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
