XI 00 GJ 4.
2

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления положением объекта | 1990 |
|
SU1788514A1 |
| Двухканальное устройство для акустико-эмиссионного контроля | 1988 |
|
SU1508140A1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| Устройство для дистанционногоупРАВлЕНия пРОцЕССОМ ОТпуСКА ТОплиВА | 1979 |
|
SU822226A1 |
| Устройство для управления обменом информацией | 1987 |
|
SU1508219A1 |
| Регулятор постоянного тока для измерения тока срабатывания защиты стабилизаторов напряжения | 1982 |
|
SU1051522A1 |
| Устройство для программно-временного управления | 1983 |
|
SU1164666A1 |
| Устройство для обмена данными | 1984 |
|
SU1278874A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| Устройство для измерения фазовых сдвигов | 1985 |
|
SU1287036A1 |
Изобретение относится к автоматике и может быть использовано в системах управления, предназначенных для перемещения объектов. Целью изобретения является повышение быстродействия устройства. Сущность изобретения: устройство содержит 1 регистр (1), 1 коммутатор (2), 1 шифратор (3). 1 блок ввода адреса (4), 1 датчик перемещения (5), 2 элемента И (6, 7), 1 реверсивный счетчик импульсов (8), 1 блок выбора направления смены положения (9), 1 датчик зоны установки (10), 1 датчик рабочей зоны 
Фие.1
Изобретение относится к автоматике и может быть использовано в позиционных системах управления, предназначенных для перемещения объекта в заданное положение.
Известно устройство управления положением объекта, содержащее датчик начального положения, датчик перемещения, дешифратор, счетчик, датчик рабочей зоны, датчик зоны установки, блок вывода адреса и элемент И.
Недостатками известного устройства являются узкие функциональные возможности, а также низкое быстродействие
Наиболее близким по технической сущности к заявляемому является устройство управления положением объекта, содержащее датчик начального положения, датчик перемещения, датчики зоны установки и рабочей зоны, блок управления, элемент И, элемент 2И-2И-2ИЛИ, счетчик, дешифратор, блок, ввода адреса, три согласующих усилителя, два привода, блок управления, переключатель режимов и блок сравнения.
Недостатком прототипа является низкое быстродействие.
Целью изобретения является повышение быстродействия устройства.
Устройство управления положением объекта содержит первый элемент И, блок ввода адреса, датчик перемещения, датчик зоны установки, датчик рабочей зоны, блок управления, три согласующих усилителя, переключатель режимов и два привода. Выходы блока управления с первого по третий соединены соответственно с входами согласующих усилителей с первого по третий, выходы первого и второго согласующих усилителей с первого по третий, выходы первого и второго согласующих усилителей соединены с первым и вторым входами первого привода, выход третьего согласующего усилителя соединен с первым входом второго привода. Выходы переключателя режимов, датчика рабочей зоны и датчика зоны установки соединены соответственно с первым, вторым и третьим входами блока управления и являются первым, вторым и третьим выходами устройства. Первый и второй входы внешнего управления устройства соединены соответственно с четвертым и пятым входами блока управления. В устройство дополнительно введены регистр, коммутатор, шифратор, второй элемент И, реверсивный счетчик, блок выбора направления смены положений и четвертый согласующий усилитель, выход которого соединен с вторым входом второго привода. Входы местного управления подключены к входу блока ввода адреса, выход которого
подключен к входу шифратора выходы которого соединены с первой группой информационных входов коммутатора, вторая группа информационных входов которого
соединена с выходами регистра Управляющий вход коммутатора подключен к переключателю режимов, а выход соединен с первой группой входов блока выбора направления смены положения, вторая группа
0 входов которого соединена с выходами реверсивного счетчика импульсов Первый выход блока выбора направления смены положений подключен к четвертому выходу устройства, шестому входу блока управле5 ния и к первому входу второго элемента И. Второй выход блока выбора направления смены положений соединен с пятым выходом устройства, седьмым входом блока управления и первым входом первого
0 элемента И. Вторые входы элементов И соединены с выходом датчика перемещения, выходы первого и второго элементов И соединены соответственно с суммирующим и вычитающим входами реверсивного счетчи5 ка импульсов Информационные входы и синхровход регистра подключены соответственно к информационным и управляющим входам внешнего управления устройства.
0Кроме того, блок выбора направления
смены положения содержит гри блока сравнения, два блока вычитания, элементы И с первого по четвертый, три элемента НЕ и элемент ИЛИ Первая группа входов перво5 го блока сравнения объединена с первой группой входов первого и с второй группой входов второго блоков вычитания и соединена с второй группой входов блока выбора направления смены положения Вторая
0 группа входов первого блока сравнения объединена с второй группой первого и первой группой второго блоков вычитания и соединена с первой группой входов блока выбора направления смены положения. Вы5 ходы первого и второго блоков вычитания соединены соответственно с первыми группами входов второго и третьего блоков сравнения, вторые группы входов которых объединены и являются установочными вхо0 дами блока. Выходы второго и третьего блоков сравнения соединены соответственно с первыми входами первого и второго элементов И, первый выход первого блока сравнения соединен с вторым входом вто5 рого элемента И и, через первый элемент НЕ - с вторым входом первого элемента И. Выходы первого и, второго элементов И соединены с входами элемента ИЛИ, выход которого соединен с первым входом третьего элемента И и, через третий элемент НЕ
- с первым входом четвертого элемента И Вторые входы третьего и четвертого элементов И объединены и соединены через второй элемент НЕ с вторым выходом первого блока сравнения. Выходы третьего и четвертого элементов И являются соответственно первым и вторым выходами блока.
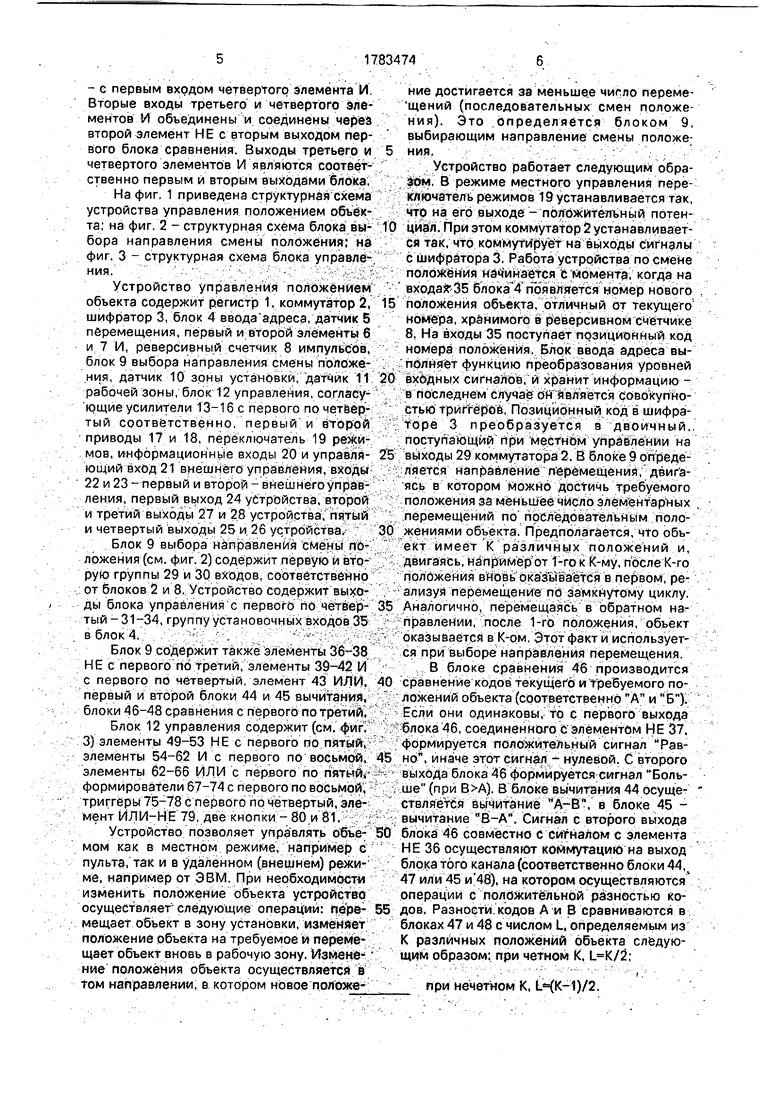
На фиг 1 приведена структурная схема устройства управления положением объекта; на фиг 2 - структурная схема блока выбора направления смены положения; на фиг. 3 - структурная схема блока управления
Устройство управления положением объекта содержит регистр 1, коммутатор 2, шифратор 3, блок 4 ввода адреса, датчик 5 перемещения, первый и второй элементы б и 7 И, реверсивный счетчик 8 импульсов, блок 9 выбора направления смены положения, датчик 10 зоны установки, датчик 11 рабочей зоны, блок 12 управления согласующие усилители 13-16 с первого по четвертый соответственно первый и второй приводы 17 и 18, переключатель 19 режимов, информационные входы 20 и управляющий вход 21 внешнего управления, входы 22 и 23 - первый и второй - внешнего управления, первый выход 24 устройства, второй и третий выходы 27 и 28 устройства, пятый и четвертый выходы 25 и 26 устройства.
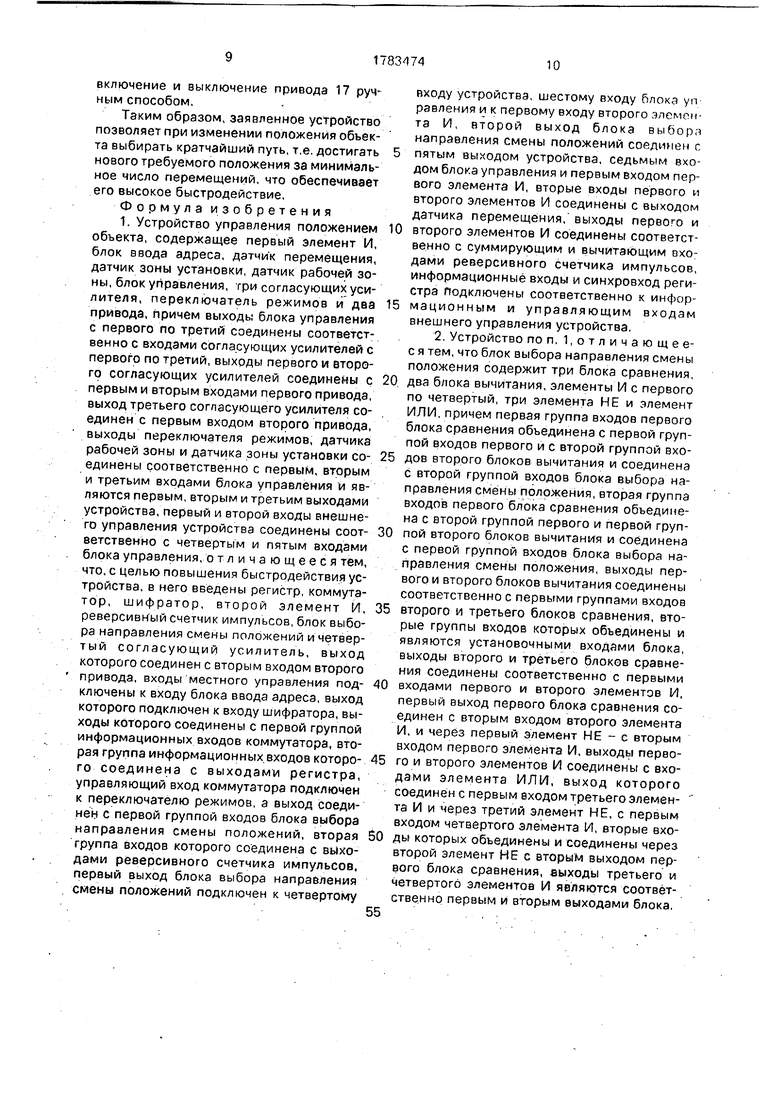
Блок 9 выбора направления смены положения (см. фиг. 2) содержит первую и вторую группы 29 и 30 входов, соответственно от блоков 2 и 8 Устройство содержит выходы блока управления с первого по четвер тый- 31-34, группу установочных входов 35 в блок 4
Блок 9 содержит также элементы 36-38 НЕ с первого по третий, элементы 39-42 И с первого по четвертый элемент 43 ИЛИ, первый и второй блоки 44 и 45 вычитания, блоки 46-48 сравнения с первого по третий
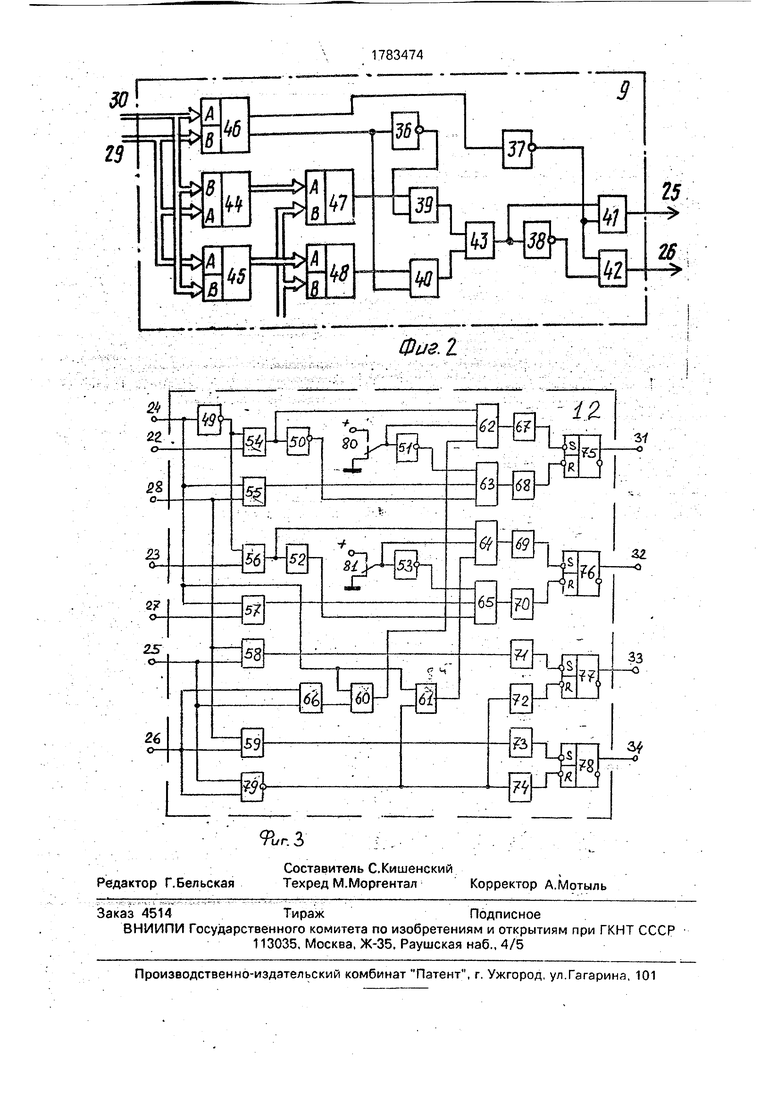
Блок 12 управления содержит (см. фиг. 3) элементы 49-53 НЕ с первого по пятый, элементы 54-62 И с первого по восьмой, элементы 62-66 ИЛИ с первого по пятый формирователи 67-74 с первого по восьмой, триггеры 75-78 с первого по четвертый, элемент ИЛИ-НЕ 79, две кнопки - 80 и 81.
Устройство позволяет управлять объемом как в местном режиме, например с пульта, так и в удаленном (внешнем) режиме, например от ЭВМ При необходимости изменить положение объекта устройство осуществляет следующие операции: перемещает объект в зону установки, изменяет положение объекта на требуемое и перемещает объект вновь в рабочую зону. Изменение положения объекта осуществляется в том направлении, в котором новое положение достигается за меньшее число переме- щений (последовательных смен положе ния). Это определяется блоком 9 выбирающим направление смены положе
ния.
Устройство работает следующим образом. В режиме местного управления переключатель режимов 19 устанавливается так, что на его выходе - положительный потенциая. При этом коммутатор 2 устанавливается так, что коммутирует на выходы сигналы с шифратора 3. Работа устройства по смене положения начинается с момента, когда на входа 35 блока 4 появляется номер нового
положения объекта, отличный от текущего номера, хранимого в реверсивном счетчике 8. На входы 35 поступает позиционный код номера положения. Блок ввода адреса выполняет функцию преобразования уровней
входных сигналов, и хранит информацию - в последнем случае он является совокупностью триггеров Позиционный код в шифраторе 3 преобразуется в двоичный, поступающий при местном управлении на
выходы 29 коммутатора 2. В блоке 9 определяется направление перемещения, двигаясь в котором можно достичь требуемого положения за меньшее число элементарных перемещений по последовательным положениями объекта. Предполагается, что объект имеет К различных положений и, двигаясь, например от 1-го к К-му, после К-го положения вновь оказывается в первом, реализуя перемещение по замкнутому циклу
Аналогично, перемещаясь в обратном направлении, после 1-го положения, объект оказывается в К-ом Этот факт и используется при выборе направления перемещения В блоке сравнения 46 производится
сравнение кодов текущего и требуемого положений объекта (соответственно А и Б). Если они одинаковы, то с первого выхода блока 46, соединенного с элементом НЕ 37. формируется положительный сигнал Равно, иначе этот сигнал - нулевой. С второго выхода блока 46 формируется сигнал Больше (при ). В блоке вычитания 44 осуществляется вычитание А-8, в блоке 45 - вычитание В-А. Сигнал с второго выхода
блока 46 совместно с сигналом с элемента НЕ 36 осуществляют коммутацию на выход блока того канала (соответственно блоки 44Ч 47 или 45 и 48), на котором осуществляются операции с положительной разностью кодов. Разности кодов А и В сравниваются в блоках 47 и 48 с числом L, определяемым из К различных положений объекта следующим образом: при четном К,
i
при нечетном К, L(K-1)/2.
Блоки 47 и 48 формируют положительный сигнал Больше в случае, когда значение разности кодов превышает значение числа L Двоичный код числа L для каждого объекта неизменен. Таким образом, если разность кодов больше, чем число L, с выхода блока 47(48) формируется положительный сигнал, который через элементы И 39 (40) и 43 поступает на вход элемента 41. Этот же сигнал через элемент 38 поступает с инверсией на элемент 42. На раздельных входах элементов 41 и 42 всегда сигналы различного уровня. Когда коды А и В не равны, с выхода элемента НЕ 37 формируется сигнал, открывающий элементы И 41 и 42, на выходах которых формируются выходные сигналы блока; эти сигналы являются управляющими для блока 12. Если разность кодов больше чем L, то сигнал 25 равен 1, а сигнал 26 - при разности - меньшей, чем L - наоборот.
В блоке управления 12 при местном управлении сигнал 24 равен 1, он открывает элементы 55, 57, 60 и 61. Сигнал с выхода элемента 49 - нулевой, закрывает элементы 54 и 56. Сигнал с выхода 25 (26) вызывает формирование сигнала на выходе элемента 66, который через элементы .60, 62 и 67 устанавливает триггер 75 в единичное состояние. Сигнал с этого триггера вызывает перемещение объекта приводом 17 в направлении зоны установки. Формирователи 67-74 выполняются по стандартной схеме; их назначение - формирование короткого отрицательного импульса при появлении на входе положительного фронта сигнала. Триггеры 75 и 76 подключены к приводу, перемещаемому объект между рабочей зоной и зоной установки. Когда триггер 75 - в единичном состоянии, а 76 - в нулевом, объект перемещается из рабочей зоны в зону установки; при противоположных значениях сигналов - в обратном направлении. Если оба триггера - в нулевых Состояниях, объект неподвижен (привод 17 не функционирует).
По сигналу с датчика 10 через элементы 55, 63 и 68 триггер 75 по достижении зоны установки устанавливается в нулевое состояние: зона устаноски достигнута. Этим же сигналом осуществляется формирование импульса на элементе 58, что вызывает срабатывание триггера 77 (или 78), по которому привод 18 изменяет последовательно положения объекта в выбранном направлении.
Для каждой смены положения датчик 5 формирует импульсы, которые через элемент 6 (или 7) поступают на суммирующий (вычитающий) вход реверсивного счетчика. Так отслеживается смена положения Когда состояние счетчика 8 становится равным коду с входов 29, в блоке 9 формируется сигнал РАВНО на выходе блока 46, снимающий положительный потенциал с выхода элемента 37; оба выходных сигнала 25 и 26
5 принимают нулевое значение. Срабатывает элемент ИЛИ-НЕ 79 и сбрасывает триггер 78 (77) в нулевое состояние. Поиск нового положения завершен. Сигнал с элемента 79 через элементы 61, 64 и 69 устанавливает
0 триггер 76 в единичное состояние, и далее привод 17 перемещает объект вновь в рабочую зону.
Срабатывание датчика рабочей зоны 11 через элементы 57,65 и 70 возвращает триг5 rep 76 в нулевое состояние, чем завершается операция по местному управлению сменой положения объекта,
При внешнем управлении с переключателя 19 формируется нулевой потенциал, на
0 выходы коммутатора 2 поступают сигналы с регистра 1. В блоке управления закрываются элементы 55, 57, 60 и 61, и открываются элементы 54 и 56 через элемент НЕ 49. Несовпадение кодов на входах 29 и 30
5 блока 9 вызывает как и описано ранее появление сигнала на одном из выходов - 25 или 26. Этот факт устанавливается ЭВМ, которая по входу 22 блока 12 устанавливает триггер 75 в единичное состояние, после чего
0 объект перемещается в зону установки. По сигналу датчика 10 (выход 28) ЭВМ снимает сигнал на входе 22, чем - через элемент 50 сбрасывает триггер 75. Триггер 77 (или 78) устанавливается в единичное состояние и
5 начинается поиск нового положения объекта. Окончание поиска фиксируется срабатыванием блока 46; триггер 77 (78) сбрасывается и привод 18 останавливается; ЭВМ по отсутствию сигналов на выходах 25
0 и 26 выдает сигнал по входу 23, который через элементы 56, 64 и 69 устанавливает триггер 76 в единичное состояние, после чего объект возвращается в рабочую зону. При срабатывании датчика 11 сигнал по вы5 ходу 28 воспринимается ЭВМ, которая фиксирует достижение рабочей зоны и снимает сигнал с входа 23 устройства; перепад напряжения этого сигнала через элемент 52 сбрасывает триггер 76, после чего работа по
0 смене положения в режиме внешнего управления заканчивается.
Кнопки 80 и 81 предназначены для ручного управления перемещением объекта из рабочей зоны в зону установки и обратно.
5 Нажатие, например кнопки 80, соединением ее подвижного контакта к положительному потенциалу, вызывает срабатывание через элементы 62 и б триггера 75. Отжатие кнопки через элементы 51,63 и 68 вызывает сброс триггера 75. Так осуществляется
включение и выключение привода 17 ручным способом.
Таким образом, заявленное устройство позволяет при изменении положения объекта выбирать кратчайший путь, т.е. достигать нового требуемого положения за минимальное число перемещений, что обеспечивает его высокое быстродействие.
Формула изобретения 1. Устройство управления положением объекта, содержащее первый элемент И, блок ввода адреса, датчик перемещения, датчик зоны установки, датчик рабочей зоны, блок управления, гри согласующих усилителя, переключатель режимов и два привода, причем выходы блока управления с первого по третий соединены соответственно с входами согласующих усилителей с первого по третий, выходы первого и второго согласующих усилителей соединены с первым и вторым входами первого привода, выход третьего согласующего усилителя соединен с первым входом второго привода, выходы переключателя режимов, датчика рабочей зоны и датчика зоны установки соединены соответственно с первым, вторым и третьим входами блока управления и являются первым, вторым и третьим выходами устройства, первый и второй входы внешнего управления устройства соединены соответственно с четвертым и пятым входами блока управления, отличающееся тем, что, с целью повышения быстродействия устройства, в него введены регистр, коммутатор, шифратор, второй элемент И, реверсивный счетчик импульсов, блок выбора направления смены положений и четвертый согласующий усилитель, выход которого соединен с вторым входом второго привода, входы местного управления подключены к входу блока ввода адреса, выход которого подключен к входу шифратора, выходы которого соединены с первой группой информационных входов коммутатора, вторая группа информационных входов которого соединена с выходами регистра, управляющий вход коммутатора подключен к переключателю режимов, а выход соединен с первой группой входов блока выбора направления смены положений, вторая группа входов которого соединена с выходами реверсивного счетчика импульсов, первый выход блока выбора направления смены положений подключен к четвертому
входу устройства, шестому входу блока уп равления и к первому входу второго элемон та И, второй выход блока выбор, направления смены положений соединен г пятым выходом устройства, седьмым входом блока управления и первым входом первого элемента И, вторые входы первого и второго элементов И соединены с выходом датчика перемещения, выходы первого и
второго элементов И соединены соответственно с суммирующим и вычитающим входами реверсивного счетчика импульсов, информационные входы и синхровход регистра подключены соответственно к информационным и управляющим входам внешнего управления устройства.
2 Устройство по п. 1,отличающее- с я тем, что блок выбора направления смены положения содержит три блока сравнения,
два блока вычитания, элементы И с первого по четвертый, три элемента НЕ и элемент ИЛИ, причем первая группа входов первого блока сравнения объединена с первой группой входов первого и с второй группой входов второго блоков вычитания и соединена с второй группой входов блока выбора направления смены положения, вторая группа входов первого блока сравнения объединена с второй группой первого и первой группой второго блоков вычитания и соединена с первой группой входов блока выбора направления смены положения, выходы первого и второго блоков вычитания соединены соответственно с первыми группами входов
второго и третьего блоков сравнения, вторые группы входов которых объединены и являются установочными входами блока, выходы второго и третьего блоков сравнения соединены соответственно с первыми
входами первого и второго элементов И, первый выход первого блока сравнения соединен с вторым входом второго элемента И, и через первый элемент НЕ - с вторым входом первого элемента И, выходы первого и второго элементов И соединены с входами элемента ИЛИ, выход которого соединен с первым входом третьего элемента И и через третий элемент НЕ, с первым входом четвертого элемента И, вторые входы которых объединены и соединены через второй элемент НЕ с вторым выходом первого блока сравнения, выходы третьего и четвертого элементов И являются соответственно первым и вторым выходами блока.
9V 3
Редактор Г.Вельская
Составитель СЖишенский
Техред М.МоргенталКорректор А.Мотыль
Фиг. 2.
| Авт.свид | |||
| № 1146626, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авт.свид | |||
| Устройство управления положением объекта | 1986 |
|
SU1399703A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авт.свид | |||
| Устройство для управления положением объекта | 1977 |
|
SU744462A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
