Изобретение относится к автоматике и может быть использовано п позиционных системах управления, предназначенных для перемещения объекта в заданное положение.
Известно устройство для перемещения объекта, содержащее датчик начального положения, счетчик импульсов, дешифратор, элемент И, датчики рабочей зоны и зоны установки, три согласующих усилителя, двл привода, блок упраЕтения.
Недостатком известного устройства являются узкие функциональные возможности.
Наиболее близким по технической сущности к предлагаемому устройству является устройство управления положением объекта, содержащее датчик начального положения, датчик перемещения, датчики рабочей зоны и зоны установки, блок управления, элемент И, элемент 2И-2И-2ИЛИ, счетчик, дешифратор, блок ввода адреса, три согласующих усилителя, два привода и блок сравнения.
Недостатком известного устройства - прототипа - являются узкие функциональные возможности, так как данное устройство управляет лишь объектами, имеющими одну рабочую зону.
Целью изобретения является расширение функциональных возможностей устройства путем обеспечения работы объекта в нескольких рабочих зонах..
Это достигается тем что в устройство управления положением объекта, содержащее первый блок сравнения, элемент НЕ, первый элемент 2И-2И-2ИЛИ. датчик перемещения, датчик начального положения, счетчик импульсов, первый дешифратор, блок ввода адреса, блок управления, датчик зоны установки, первый датчик рабочей зоны, три согласующих усилителя, переключатель режимов и два привода, причем переключатель режимов соединен с элементом НЕ, с первым выходом устройства и с первым входом блока управления, выход элемента НЕ соединен с вторым входом блока управления, выход датчика зоны уста- новки соединен с третьим входом блока уп- равления и со вторым выходом устройства, выходы блока управления подключены к входам согласующих усилителей соответственно с первого по третий, выходы первого и второго согласующих усилителей подключены соответственно к первому и второму входам первого привода, выход третьего согласующего усилителя соединен с входом второго привода, выходы датчиков началь- ного положения и перемещения соединены соответственно с входом сброса и первым тактирующим входом счетчика импульсов, выходы которого соединены с входами первого дешифратора и с первой группой вхо- дов первого блока сравнения, выходы первого дешифратора соединены с первой группой входов блока ввода адреса, вторая группа входов которого является первой труппой информационных входов устройст- ва, первый и второй входы первого элемента 2 И-21/1-2 И Л И соединены соответственно с выходами элемента НЕ и первого блока сравнения, третий вход - с переключателем режимов, а выход подключен к второму тактирующему входу счетчика, третьему выходу устройства и к четвертому входу блока управления, первый и второй входы внешнего управления устройства соединены соответственно с пятым и шестым входами блока управления, введены три регистра, второй и третий блоки сравнения, второй и третий элементы 2И-2И-2ИЛИ, К-1 датчиков рабочей зоны, группа из К элементов И, элемент И-НЕ, элемент ИЛИ, второй дешифратор, шифратор и коммутатор, причем информационные входы первого и второго регистров и шифратора являются соответственно группами информационных входов устройства с второй по четвертую, синхров- ходы первого и второго регистров являются первым и вторым управляющими входами устройства, выходы дешифратора соединены с первой группой входов третьего блока сравнения и с первой группой информаци- ОНнЫХ входов коммутатора, вторая группа информационных входов которого соединена с выходами второго регистра, и с второй группой входов второго блока сравнения, а выход подключен к информационным входам третьего регистра и второго дешифратора, выходы которого соединены с первыми входами соответствующих К элементов И группы, вторые входы которых подключены к выходам соответствующих датчиков рабочей зоны, а выходы соединены с входами элемента ИЛИ, выход которого соединен с седьмым входом блока управления, синхровходом третьего регистра и четвертым выходом устройства, выходы третьего регистра соединены с первой группой входов второго блока сравнения и второй группой входов третьего блока сравнения, выходы первого регистра соединены с второй группой входов первого блока сравнения, входы второго элемента 2И-2И-2ИЛИ соединены соответственно с выходом элемента НЕ, и с первым выходом второго блока сравнения, с переключателем режимов и с первым выходом третьего блока сравнения, входы третьего элемента 2И- 2И-2ИЛИ соединены соответственно с выходом элемента НЕ и с вторым Е;ЫХОДОМ второго блока сравнения, с переключателем режимов и с вторым выходом третьего блока сравнения, переключатель режимов соединен также с управляющим входом коммутатора, выходы второго и третьего элементов 2И-2И-2ИЛИ соединены соответственно с восьмым и девятым входами блока управле- нй я и являются пятым и шестым выходами устройства, выходы блока ввода адреса соединены с входами элемента И-НЕ. выход которого подключен к четвертому входу первого элемента 2И-2И-2ИЛИ, выход которого
соединен с входом сброса третьего регистра.
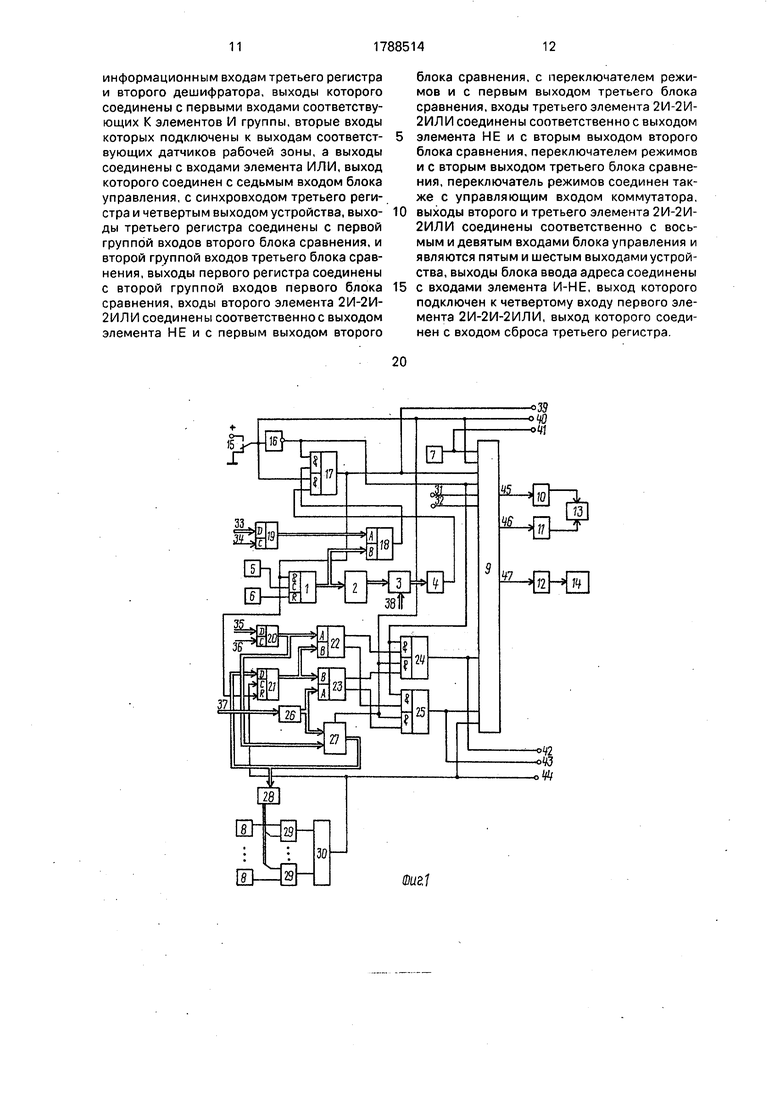
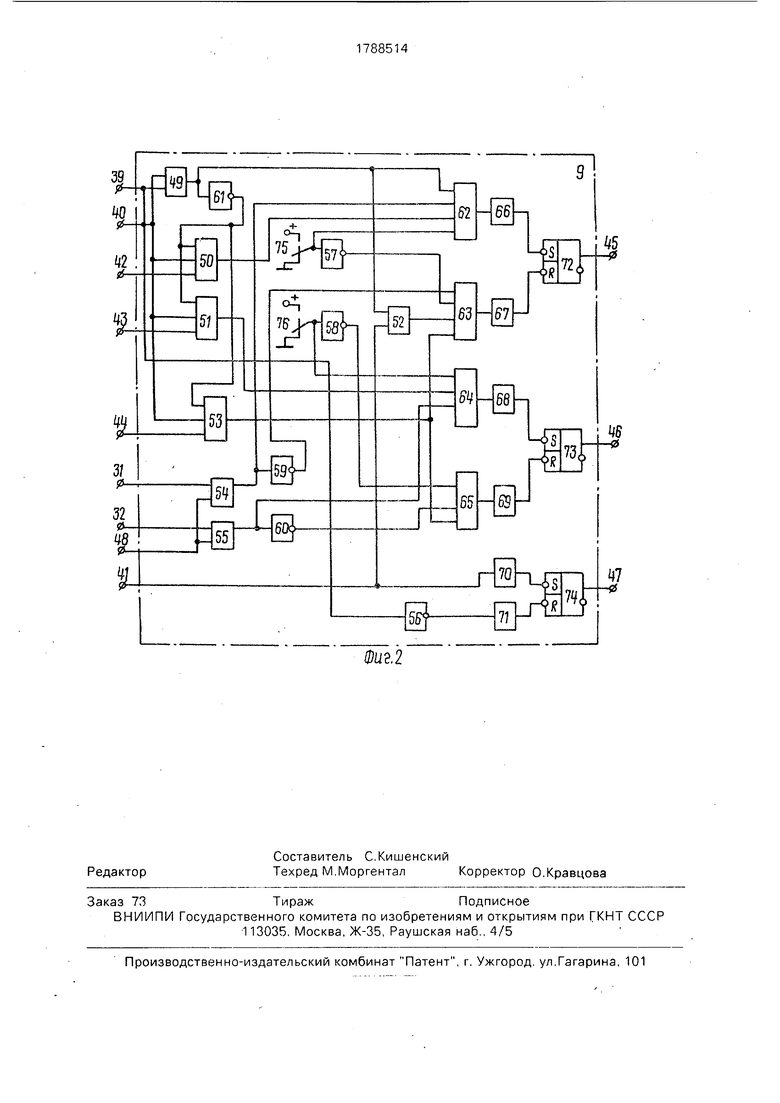
На фиг. 1 приведена структурная схема устройства управления положением объекта; на фиг. 2 - структурная схема блока управления.
Устройство управления положением объекта содержит счетчик 1 импульсов, первый дешифратор 2, блок 3 ввода адреса, элемент И-Н Е 4, датчик 5 перемещения, датчик 6 начального положения, датчик 7 зоны установки, датчики 8 рабочих зон, блок 9 управления, первый, второй и третий согласующие усилители 10,11 и 12 соответственно, первый и второй приводы 13 и 14, переключатель 15 режимов, элемент НЕ 16, первый элемент 2И-2И-2ИЛИ 17, первый 18 блок сравнения, первый 19 регистр, второй и третий регистры 20 и 21, второй и третий блоки 22 и 23 сравнения, второй и третий элементы 2И-2И-2ИЛИ 24 и 25, шифратор 26, коммутатор 27, второй дешифратор 28, группу 29 элементов И, элемент ИЛИ 30, первый и второй входы 31 и 32 внешнего управления, вторую группу 33 информационных входов, первый управляющий вход
34. третью группу информационных входов
35. второй управляющий вход 36, четвертую и первую группы 37 и 38 информационных входов, третий, первый, второй, пятый, шестой и четвертый выходы 39-44 устройства, выходы 45-47 блока управления с первого по третий, выход 48 элемента НЕ 16.
Блок управления (фиг. 2) содержит элементы И 49-55 с первого по седьмой, шестой элемент НЕ 56, элементы НЕ 57-61 с первого по пятый, элементы 62-65 ИЛИ с первого по четвертый, формирователи импульсов 66-71 с первого по шестой, триггеры 72-74 с первого по третий, две кнопки 75 и 76.
Принцип функционирования устройства заключается в следующем. Имеется несколько (К) рабочих зон. в которых объект совершает некую работу. Работа в каждой зоне совершается в одном из нескольких положений объекта. При необходимости смены положения объект обязан переместиться в зону установки, сменить положения и затем переместиться в требуемую зону, которая возможно не совпадает с предыдущей. Иногда необходимо простое перемещение объекта из одной рабочей зоны в другую без смены положения. В этом случае производится непосредственное перемещение объекта из одной рабочей зоны в другую.
Все операции могут производиться как под управлением местных сигналов (например, с пульта), так и посредством внешнего (дистанционного) управления (например, от ЭВМ).
Устройство работает следующим образом.
В режиме местного управления переключатель 15 устанавливается так, что на
входе элемента НЕ 16 - положительный потенциал, элементы 17, 24 и 25 коммутируют на свои выходы соответственно сигналы с выходов блоков 4 и 23.
Пусть необходимо сменить положение
0 объекта и переместиться в другую рабочую зону (относительно текущей). При этом по входам 38 и 37 поступают в устройство - в блоки 3 и 26 - соответственно позиционные коды номера нового положения объекта и
5 номера новой зоны. Блок 3 может представлять собой, например, совокупность элементов типа РАВНОЗНАЧНОСТЬ, количество которых равно числу различных положений объекта. В счетчике 1 хранится
0 текущий двоичный код положения объекта, преобразуемый дешифратором 2 в позиционный код. При изменении номера рабочей зоны появляются низкие потенциалы на некоторых выходах блока 3, что является ини5 циализирующим фактором работы устройства; на выходе элемента И-НЕ 4 появляется высокий потенциал.
Аналогично в регистре 21 хранится двоичный код номера текущей рабочей зоны,
0 поступающий в блоки сравнения 22 и 23. В блоке 23 производится сравнение кодов текущей и новой рабочих зон объекта. Выходы Больше и Меньше блока 23 соединены соответственно с входами элементов 24 и 25
5 (сигналы на них формируются соответственно в случаях, когда номер текущей рабочей зоны больше (меньше) номера новой). Зона установки условно находится рядом с первой рабочей зоной и является как бы нуле0 вой. Наличие положительного сигнала с выхода элемента 24 или 25 означает, что необходимо изменить рабочую зону объекта.
Таким образом наличие сигналов на выходе элемента 4 и на одном из выходов 42
5 или 43 означает, что нужно сменить положение объекта и переместить его в новую рабочую зону.
Соответствующие сигналы 42. 43 и 39 поступают в блок 9 управления, в котором
0 исходное состояние всех триггеров 72-84 - нулевое. По единичному значению сигнала 40 разрешается работа элементов 49-51 и 53. По единичному сигналу на входе 39 через элементы 49, 62 и 66 триггер 72 устанав5 ливается в единичное состояние, выходные сигналы с триггеров 72 и 73 через согласующие усилители 10 и 11 поступ-ают на первый привод и он перемещает объект в сторону зон с меньшими номерами (и в конечного итоге - в зону установки). Фopмиpoвaтeл
66-71 выполнены по стандартным схемам и вырабатывают короткие импульсы отрицательной полярности при поступлении на вход положительного фронта сигнала.
После перемещения объекта в зону начальной установки срабатывает датчик 7 зоны установки. По входу 41 положительный сигнал через открытый элемент 52, элементы 63 и 67 возвращает триггер 72 в нулевое состояние и перемещение объекта прекращается. Одновременно сигнал 41 через элемент 70 устанавливает триггер 74 в единичное состояние и начинает работать привод 14, выбирая новое положение объекта. Привод 14 последовательно перемещает объект из положения в положение, при каждой смене положения срабатывает датчик перемещения, инкрементирующий содержимое счетчика 1. Так осуществляется слежение за номером положения объекта. При достижении некоторого положения, условно принятого за нулевое, срабатывает датчик начального положения и сбрасывает счетчик 1 в нулевое состояние. Далее счет продолжается аналогичным образом.
При достижении нужного положения на выходах элементов 4 и 17 формируются нулевые сигналы; на входе 49 устанавливается О, а на выходе элемента 61 появляется сигнал, открывающий элемент 50, 51 и 53. На выходе элемента НЕ 56 формируется сигнал, который через блок 71 возвращает триггер 74 в нулевое состояние; смена положений прекращается. При появлении сигнала на выходе элемента 17 сбрасывается регистр 21 (хранящий код текущей рабочей зоны), следовательно, после достижения нужного положения, код текущей рабочей зоны всегда меньше кода новой. Это вызывает срабатывание элемента 25, и далее - элементов 51, 64 и 68; триггер 73 устанавливается в единичное состояние и обеспечивает перемещение приводом 14 объекта в сторону рабочих зон с большими номерами. Позиционный код новой рабочей зоны на входах 37 преобразуется шифратором 26 в двоичный код, а коммутатором 27 и дешифратором 28 - вновь в позиционный код, и поступает на входы элементов И 29 группы. На выходе соответствующего новой рабочей зоны элемента И 29 сформируется сигнал лишь при срабатывании датчика данной рабочей зоны .Этот сигнал через элемент ИЛИ 30 записывает в регистр номер данной зоны (становящейся текущей), а по входу 44 через элементы 55, 65 и 69 возвращает триггер 73 в нулевое состояние, заканчивая процесс выполнения задания.
При требовании перемещения объекта из одной рабочей зоны в другую без изменения положения, сигналы с элементов 4 и 17 - нулевые. В блоке 23 единичное значение принимает один из выходных сигналов - Больше или Меньше. При единичном
сигнале Больше срабатывает элемент 24 и по входу 42 через элементы 50,62 и 66 устанавливает привод 13 в режим перемещения объекта в сторону зон с меньшими номерами. Аналогично при достижении требуемой
зоны срабатывает соответствующий датчик 8, через элементы 29 и 30 записывает значение кода новой зоны в регистр 21 и возвращает триггер 72 в нулевое состояние, после чего операция завершается.
При единичном значения сигнала Меньше блока 23 срабатывает элемент 25, по входу 43 - элементы 51, 64 и 68. и триггер 73 включает привод 13 в режим перемещения объекта в сторону зон с большими номерами, а при достижении требуемой зоны отключение триггера 73 осуществляется через элементы 53, 65 и 69.
В режиме дистанционного управления устройство работает следующим образом.
Переключатель режимов устанавливается так, что на его выходе - нулевой потенциал. Единичный потенциал с выхода элемента НЕ 16 подключает на выход элемента 17 выход блока сравнения 18 не равно, на котором формируется единичный потенциал при несовпадении кодов счетчика 1 и регистра 19. В блоке управления в данном режиме закрываются элементы 49, 50, 51, 53 и открываются элементы 54 и 55
для сигналов внешнего управления 31 и 32. В данном режиме информация о кодах нового положения и новой зоны поступает (например, от ЭВМ) в двоичном коде соответственно по входам 33 и 35. Запись этой
информации в регистры соответственно 19 и 20 осуществляется сигналами, подаваемыми на синхровходы З4 и 36 регистров с шины управления ЭВМ. В данном режиме блоки 24, 25 и 27 переключаются так. что коммутируют на выходы сигналы соответственно с выходов блоков 22 и 20.
При требовании смены положения и рабочей зоны появляется сигнал Не равно с
выхода элементов 18. 17 и на входе 39 ЭВМ. По этому сигналу ЭВМ выдает управляющий сигнал на вход 31 устройства, через элементы 54, 62 и 66 устанавливающий триггер 72 в единичное состояние, после чего объект
перемещается в зону начальной установки. Сигнал от датчика 7 поступает в ЭВМ по выходу 41, этот же сигнал через элемент 70 включает триггер 74, реализующий изменение положения объекта. По сигналу от датчика 7 ЭВМ отключает сигнал 31. формируется
сигнал на выходе элементов 63, 67 и триггер 72 устанавливается в нулевое состояние.
По достижении требуемого положения (содержимое счетчика равно содержимому регистра 19) на выходе блока 18 появляется О, который через элементы 56, 71 устанавливает триггер 74 в нулевое состояние. Получив нулевой сигнал по выходу 39, ЭВМ устанавливает активное (единичное) значение сигнала на выходе 32 и через элементы 55, 64 и 68 устанавливает триггер 73 в единичное состояние; объект перемещается в требуемую рабочую зону. При срабатывании ее датчика 8 через элементы 29 и 30 аналогично производится запись кода зоны в регистр 21, а по входу 44 ЭВМ снимает сигнал 32. На выходе элемента 60 формируется положительный фронт импульса, который через элементы 65 и 69 сбрасывает триггер 73. Операция завершена.
При перемещении объекта из зоны в зону без смены положения в режиме дистанционного управления несовпадение кодов на выходах блоков 20 и 21 вызывает появление сигнала на одном из выходов - 42 или 43. В зависимости от ситуации, ЭВМ сигналом 31 (32) включает триггер 72 (73) и привод осуществляет перемещение. При срабатывании соответствующего датчика 8 в регистр 21 записывается код новой зоны, а по исчезновению сигнала (42 или 43) ЭВМ отключает сигнал 31 (32) и привод 13 останавливается.
В технологических целях в блок 9 управления введены кнопки 75 и 76 для непосред- ственного перемещения объекта между рабочими зонами и зоной установки. Нажатие соответствующей кнопки (при этом с ее выхода - положительный сигнал) включает триггер 72 (73), а отжатие - через элементы НЕ (57 или 58) - отключение триггера,
Изобретение позволяет обеспечить как местное, так и дистанционное управление объектом,.работающим в нескольких рабочих зонах, перемещать объект из одной ра- бочей зоны в другую как со сменой его положения, так и без смены, что расширяет функциональные возможности изобретения в сравнении с прототипом.
Формула изобретения
Устройство управления положением объекта, содержащее первый блок сравнения, элемент НЕ, первый элемент 2И-2И- 2ИЛИ, датчик перемещения, датчик начального положения, счетчик импульсов, первый дешифратор, блок ввода адреса, блок, управления, датчик зоны установки, первый датчик рабочей зоны, три согласующих усилителя, переключатель режимов и два привода, причем переключатель режимов соединен с входом первого элемента НЕ, с первым выходом устройства и с первым входом блока управления, выход элемента НЕ соединен с вторым входом блока управления, выход датчика зоны установки соединен с третьим входом блока управления и с вторым выходом устройства, выходы блока управления подключены к входам согласующих усилителей соответственно с первого по третий, выходы первого и второго согласующих усилителей подключены соответственно к первому и второму входам первого привода, выход третьего согласующего усилителя соединен с входом второго привода, выходы датчиков начального положения и перемещения соединены соответственно с входом сброса и первым тактирующим входом счетчика импульсов, выходы которого соединены с входами первого дешифратора, и с первой группой входов первого блока сравнения, выходы первого дешифратора соединены с первой группой входов блока ввода адреса, вторая группа входов которого является первой группой входов устройства, первый и второй входы первого элемента 2И-2И-2ИЛИ соединены соответственно с выходами элемента НЕ и первого блока сравнения, третий вход - с переключателем режимов, а выход подключен к второму тактирующему входу счетчика, третьему выходу устройства и к четвертому входу блока управления, первый и второй входы внешнего управления устройства соединены соответственно с пятым и шестым входами блока управления, отличающееся тем. что, с целью расширения функциональных возможностей путем обеспечения работы объекта в нескольких рабочих зонах, в него введены три регистра, второй и третий блоки сравнения, второй и третий элементы 2И-2И- 2ИЛИ, К-1 датчиков рабочей зоны, группа из Кэлементов И, элемент И-НЕ, элемент ИЛИ, второй дешифратор, шифратор и коммутатор, причем информационные входы первого и второго регистров и шифратора являются соответственно группами информационных входов устройства с второй по четвертую, синхровходы первого и второго регистров являются первыми и вторыми управляющими входами устройства, выходы шифратора соединены с первой группой входов третьего блока сравнения и с первой группой информационных входов коммутатора, вторая группа информационных входов которого соединена с выходами второго регистра и с второй группой входов второго блока сравнения, а выходы подключены к
информационным входам третьего регистра и второго дешифратора, выходы которого соединены с первыми входами соответствующих К элементов И группы, вторые входы которых подключены к выходам соответствующих датчиков рабочей зоны, а выходы соединены с входами элемента ИЛИ, выход которого соединен с седьмым входом блока управления, с синхровходом третьего регистра и четвертым выходом устройства, выходы третьего регистра соединены с первой группой входов второго блока сравнения, и второй группой входов третьего блока сравнения, выходы первого регистра соединены с второй группой входов первого блока сравнения, входы второго элемента 2И-2И- 2ИЛ И соединены соответственно с выходом элемента НЕ и с первым выходом второго
блока сравнения, с переключателем режимов и с первым выходом третьего блока сравнения, входы третьего элемента 2И-2И- 2ИЛ И соединены соответственно с выходом
элемента НЕ и с вторым выходом второго блока сравнения, переключателем режимов и с вторым выходом третьего блока сравнения, переключатель режимов соединен также с управляющим входом коммутатора,
выходы второго и третьего элемента 2И-2И- 2ИЛИ соединены соответственно с восьмым и девятым входами блока управления и являются пятым и шестым выходами устройства, выходы блока ввода адреса соединены
с входами элемента И-НЕ, выход которого подключен к четвертому входу первого элемента 2И-2И-2ИЛИ, выход которого соединен с входом сброса третьего регистра.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления положением объекта | 1990 |
|
SU1783474A1 |
| Цифровой измеритель постоянной магнитной индукции | 1989 |
|
SU1704114A1 |
| Устройство управления положением объекта | 1986 |
|
SU1399703A1 |
| РАДИАЦИОННЫЙ ТОЛЩИНОМЕР ПОКРЫТИЙ | 1988 |
|
SU1805736A1 |
| Цифровой измеритель магнитной индукции | 1988 |
|
SU1644054A1 |
| Устройство для входного контроля изделий | 1990 |
|
SU1746388A2 |
| Устройство контроля состояния объектов | 1985 |
|
SU1366993A1 |
| Реле времени | 1988 |
|
SU1531196A1 |
| Устройство для автоматической фокусировки объектива | 1989 |
|
SU1686401A1 |
| Устройство для тренировки памяти обучаемого | 1988 |
|
SU1531125A1 |
Изобретение относится « автоматике и может быть использовано в системах управления объектами, имеющими несколько положений и рабочих зон. Целью изобретения является расширение функциональных возможностей за счет обеспечения работы объекта в нескольких рабочих зонах. Сущность изобретения: устройство управления содержит блок сравнения, элемент НЕ, первый элемент2И-2И-2ИЛИ, датчик перемещения, датчик начального положения, счетчик импульсов, первый дешифратор, блок ввода адреса, блок управления, датчик зоны установки, первый датчик рабочей зоны, три согласующих усилителя, переключатель режимов и два привода, причем переключатель режимов соединен с входом элемента НЕ, с первым выходом устройства и с первым входом блока управления, первый и второй входы первого элемента 2И-2И-2ИЛИ соединены соответственно с выходами элемента НЕ и первого блока сравнения, третий вход с переключателем режимов, а выход подключен к второму тактирующему входу счетчика, третьему входу устройства и четвертому входу блока управления, первый и второй входы внешнего управления соединены соответственно с пятым и шестым входами блока управления. В устройство введены три регистра, второй и третий блоки сравнения, второй и третий элементы 2И-2И- 2ИЛИ, К-1 датчиков рабочей зоны, группа К элементов И, элемент И-НЕ, элемент ИЛИ. второй дешифратор, шифратор и коммутатор, причем информационные входы первого и второго регистров и шифратора являются соответственно группами информационных входов устройства с второй по четвертую, выходы блока ввода адреса соединены с входами элемента И-НЕ, выход которого подключен к четвертому входу первого элемента 2И-2И-2ИЛИ, выход которого соединен с входом сброса третьего регистра. 2 ил. ел с VJ 00 00 ел Ј
| Авторское свидетельство СССР ISfe 1146626, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство управления положением объекта | 1986 |
|
SU1399703A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления положением объекта | 1977 |
|
SU744462A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
