33
JV
27
JSd
JM
(Л
фиг. 2
Изобретение относится к электротехнике, а именно к средствам автома- тизащ1и производственных процессов, и может быть использовано для управ- ления группой электрических, пневматических или гидравлических исполнительных механизмов, принадлежащих станку, манипулятору или другому производственному агрегату.
Цель изобретения - упрощение конструкции.
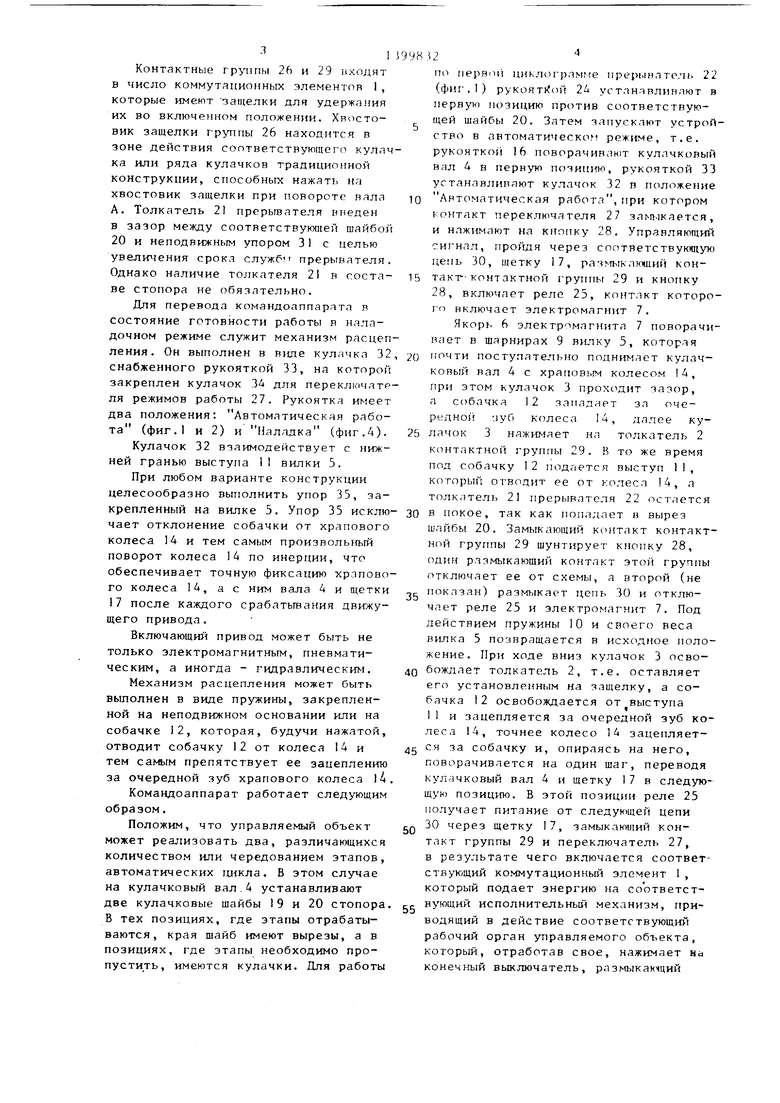
На фиг.1 изображен командоаппарат общий вид; на фиг.2 - то же, ввд слева; на фиг.3 - электрическая схема командоаппарата; на фиг.4 - командоаппарат в положении Наладка.
Командоаппарат содержит группу коммутационных элементов 1, смонтированных на неподвижном основании. Они могут быть пневматическими, гидравлическими и электрическими в зависимости от вида энергии, потребляемой исполнительными механизмами управляемого объекта.
Органы управления коммутационньЬс элементов 1 могут быть выполнены, например, в виде рычагов или толкателей 2, для управления которыми служат кулачки 3 кулачкового вала 4. Вал 4 установлен на П-образной вилке 5, связанной с якорем 6 включающего электромагнита 7. Вилка 5 выполнена в виде шарнира, ось 8 которого установлена в неподвижных опорах 9 враще- ния. Концы вилки 5 выполнены как одно целое с осью 8 и являются опорами вращения вала 4.
Вилка 5 зафиксирована в исходном положении так, ЧТО между толкателями 2 и кулачками 3 имеется зазор, достаточный для взведения движущей пружи- 10 до соприкосновения кулачков 3 с толкателями 2.
Для автоматического поворота ку- лачкового вала 4 в любую позицию служит движущий привод, выполненный на базе храпового механизма, в котором вилка 5 выполняет функцию подвижного звена. Вилка 5 подпружинена движущей пружииой 10 и имеет выступ II для взаимодействия с собачкой 12, которая установлена на неподвижной оси 13. Верхняя часть выступа И служит для отвода собачки 12 от храпового колеса 14.
На вилке 5 установлен подпружиненный ролик-фиксатор 15 храпового колеса 14, которое закреплено на валу 4,
как и рукоятка 16 и токосъемная щетка 17 переключателя 18 цепей управления .
Электромагнит 7 является не только включающим приводом для коммутационных элементов I, но используется и для приведения в действие движущего привода. Часть его якоря 6 используется для взведения движущей пружины 10, а остальная часть хода - для нажатия на толкатели 2,
Это обеспечивает независимую работу включающего и движущего приводов, а командоаппарат - необходимую гибкость в управлении.
При работе аппарата в режиме проскока, когда работает только движущий привод, возможно случайное нажатие кулачковым валом на толкатели 2, т.е. ложное срабатывание аппарата, что может привести к аварии на управляемом объекте. Это может случиться, например, при неправильной регулировке, поломке прерывателя или движущей пружины 10.
Для исключения ложных срабатываний аппарата в кинематическую цепь, которая передает движение от магнита 7 к толкателям 2, введен ограничитель поступательного движения кулачкового вала, названньй стопором. Он выполнен в виде кулачковых шайб 19 и 20, Шайбы 19 и 20 взаимодействуют с толкателем 21 прерьтателя 22, который установлен с возможностью установки его в три позиции: первая - против щайбы 20, вторая - нейтральная, третья - против щайбы 19, поэтому он снабжен пружинным фиксатором
23 и рукояткой 24.
I
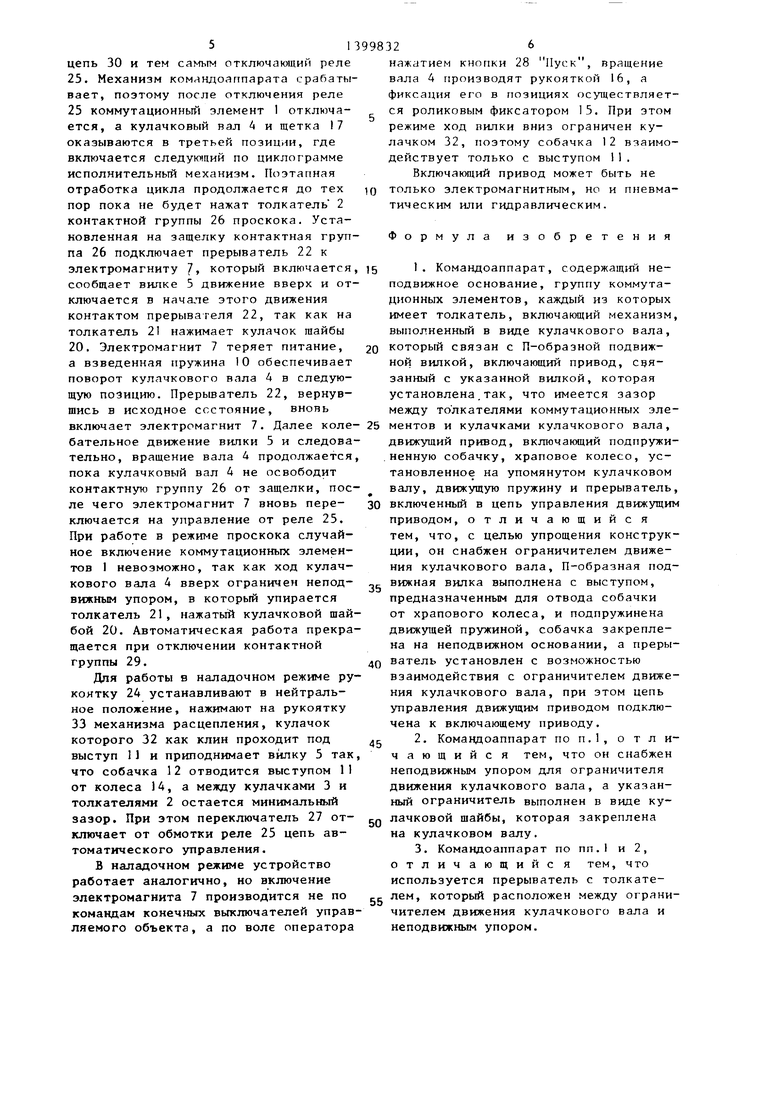
Электромагнит 7 получает питание (фиг.З) по цепи управления движущего привода, содержащей размыкающий контакт прерывателя 22 и по цепи управления включающего привода, содержащей замыкающий контакт реле 25. В обе цепи включены контакты контактной группы 26, служащей для включения проскока.
Обмотка реле 25 посредством переключателя 27 режимов управления, кнопки 28 Пуск, контакта контактной группы 29 запуска автоматического цикла и переключателя 18 соединена с цепями 30 управления исполнительных механизмов управляемого объекта.
Контактные rp Tiribi 26 и 29 иходят в число коммутлционньгх элементов I , которые имеют заи1елки для удержания их во включенном положении. Хвостовик защелки Г руппы 26 находится в зоне действия соответствующего кулачка или ряда кулачков традиционной конструкции, способных нажать на хвостовик защелки при повороте нала А. Толкатель 21 прерывателя впеден в зазор между соответствующей шайбой 20 и неподвижным упором 31 с целью увеличения срока службм прерывателя. Однако наличие толкателя 21 в соста- ве стопора не обязательно.
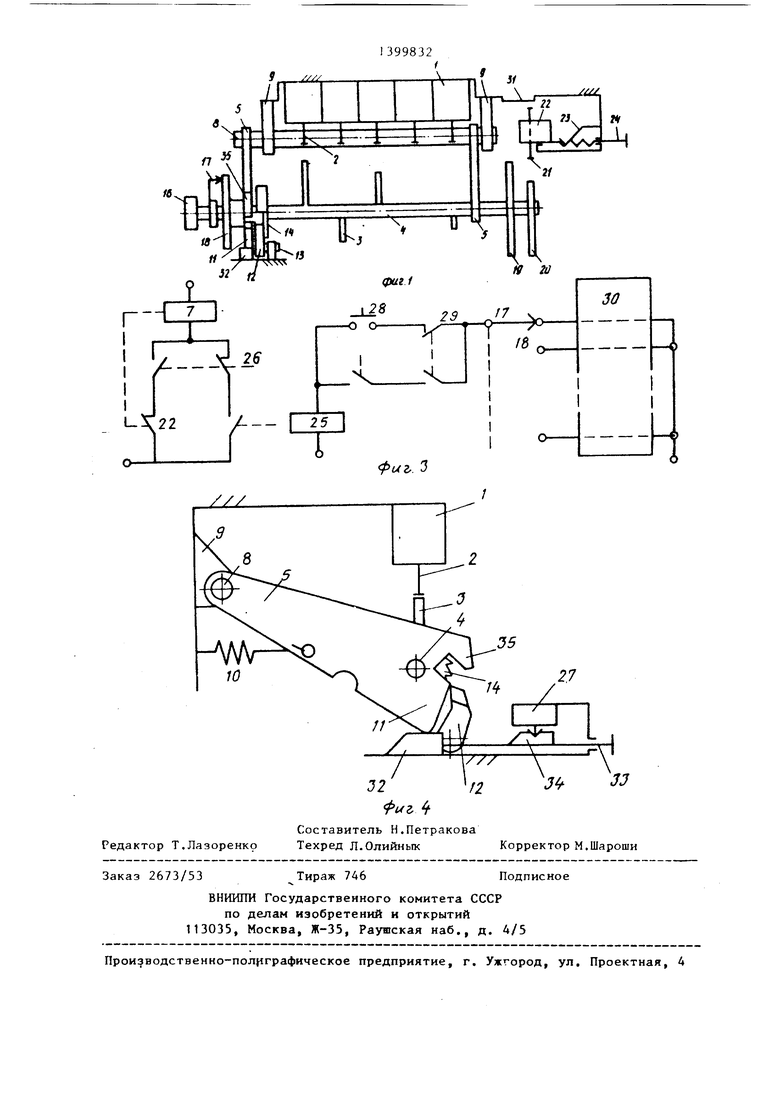
Для перевода командоаппарата в состояние готовности работы и наладочном режиме служит механизм расцепления. Он выполнен в В1ще кулачка 32 снабженного рукояткой 33, на которой закреплен кулачок 34 для переключателя режимов работы 27. Рукоятка имеет два положения: Автоматическая работа (фиг.1 и 2) и Наладка (фиг.А).
Кулачок 32 взаимодействует с нижней гранью выступа 11 вилки 5.
При любом варианте конструкции целесообразно выполнить упор 35, закрепленный на вилке 5. Упор 35 исклю чает отклонение собачки от храпового колеса 14 и тем самым произвольный поворот колеса 14 по инерции, что обеспечивает точную фиксацию храпового колеса 14, ас ним вала 4 и щетки 17 после каждого срабатьгеания движущего привода.
Включающий привод может быть не только электромагнитным, пневматическим, а иногда - гидравлическим.
Механизм расцепления может быть вьтолнен в виде пружины, закрепленной на неподвижном основании или на собачке 12, которая, будучи нажатой, отводит собачку 12 от колеса 14 и тем саьлгм препятствует ее зацеплению за очередной зуб храпового колеса l4
Командоаппарат работает следующим образом.
Положим, что управляемый объект может реализовать два, различающихся количеством или чередованием этапов, автоматических 1щкла. В этом случае на кулачковый вал.4 устанавливают две кулачковые шайбы 19 и 20 стопора В тех позициях, где этапы отрабатываются, края шайб имеют вырезы, а в позициях, где зтапы необходимо пропустить, имеются кулачки. Для работы
B
5
о
0
5
0
5
по первой циклограмме прерыватель 22 (фиг.1) рукоят1(1Й 24 устанавливают в первую позицию против соответствующей щайбы 20. Затем запускают устройство в автоматическом режиме, т.е. рукояткой 16 поворачивают кулачковый вал 4 в первую позицию, рукояткой 33 устанавливают кулачок 32 п положение Автоматическая работа, при котором контакт переключателя 27 зa.Iкaeтcя, и нажимают на кнопку 28. Управляющий сигнал, пройдя через соответствукнпую цепь 30, шетку 17, pa Iкaюший контакт- контактной группы 29 и кнопку 28, включает реле 25, контакт которого включает электромагнит 7.
HKopf. 6 электромагнита 7 поворачивает в шарнирах 9 вилку 5, которая почти поступательно поднимает кулачковый вал 4 с храповым колесом 14, при этом кулачок 3 проходит зазор, а собачка 12 западает за очередной зуб колеса 14, далее кулачок 3 нажимает на толкатель 2 контактной группы 29. 5 то же время под собачку 12 подается выступ 11, который отводит ее от колеса 14, а толкатель 21 прерывателя 22 остается в покое, так как попа;(ает н вырез шайбы 20. Замыкающий контакт контактной группы 29 щунтирует кнопку 28, один размыкающий контакт этой группы отключает ее от схемы, а второй (не показан) размыкает цепь 30 и отключает реле 25 и электромагнит 7. Под действием пружины 10 и своего веса вилка 5 позвращается в исходное положение. При ходе вниз кулачок 3 освобождает толкатель 2, т.е. оставляет его установленным на защелку, а собачка 12 освобождается от выступа 11 и зацепляется за очередной зуб колеса 14, точнее колесо 14 зацепляется за собачку и, опираясь на него, поворачивается на один шаг, переводя кулачковый вал 4 и щетку 17 в следующую позицию. В этой позиции реле 25 получает питание от следук щей цепи 30 через щетку 17, замыкающий контакт группы 29 и переключатель 27, в результате чего включается соответствующий коммутационньш элемент 1 , который подает энергию на соответствующий исполнительный механизм, приводящий в действие соответствующий рабочий орган управляемого объекта, который, отработав свое, нажимает на конечный выключатель, размыкакчций
цепь 30 и тем самым отключающий реле 25. Механизм комлндоаппарата срабаты вает, поэтому после отключения реле 25 коммутационный элемент 1 отключается, а кулачковый вал и щетка 17 оказываются в третьей позиции, где включается следующий по циклограмме исполнительный механизм. Поэтапная отработка цикла продолжается до тех пор пока не будет нажат толкатель 2 контактной группы 26 проскока. Установленная на защелку контактная груп па 26 подключает прерыватель 22 к электромагниту 7, который включается сообщает вилке 5 движение вверх и от ключается в начале этого движения контактом прерывателя 22, так как на толкатель 21 нажимает кулачок шайбы 20, Электромагнит 7 теряет питание, а взведенная пружина 10 обеспечивает поворот кулачкового вала А в следующую позицию. Прерыватель 22, вернувшись в исходное состояние, внонь включает электромагнит 7. Далее коле бательное движение вилки 5 и следова тельно, вращение вала 4 продолжается пока кулачковый вал 4 не освободит контактную группу 26 от защелки, после чего электромагнит 7 вновь переключается на управление от реле 25. При работе в режиме проскока случайное включение коммутационных элементов 1 невозможно, так как ход кулачкового вала 4 вверх ограничен неподвижным упором, в который упирается толкатель 21, нажатый кулачковой шай бой 20. Автоматическая работа прекра щается при отключении контактной группы 29.
Для работы в наладочном режиме ру коятку 24 устанавливают в нейтральное положение, нажимают на рукоятку 33 механизма расцепления, кулачок которого 32 как клин проходит под выступ 11 и приподнимает вилку 5 так что собачка 12 отводится выступом 11 от колеса 14, а между кулачками 3 и толкателями 2 остается минимальный зазор. При этом переключатель 27 отключает от обмотки реле 25 цепь автоматического управления.
В наладочном режиме устройство работает аналогично, но включение электромагнита 7 производится не по командам конечных выключателей управ ляемого объекта, а по воле оператора
998326
нажатием кнопки 28 Пуск, вращение вала 4 производят рукояткой 16, а фиксация его в позициях осуществляется роликовым фиксатором 15. При этом режиме ход пилки вниз ограничен кулачком 32, поэтому собачка 12 взаимодействует только с выступом 11.
Включающий привод может быть не 10 только электромагнитным, но и пневматическим или гидравлическим.
15
20
25
30
35
40
45
50
55
Формула изобретения
1.Командоаппарат, содержащий неподвижное основание, группу коммутационных элементов, каждый из которых имеет толкатель, включающий механизм, выполненный в виде кулачкового вала, который связан с П-образной подвижной вилкой, включающий привод, связанный с указанной вилкой, которая установлена,так, что имеется зазор между толкателями коммутационных элементов и кулачками кулачкового вала, движущий привод, включающий подпружи.ненную собачку, храповое колесо, установленное на упомянутом кулачковом валу, движущую пружину и прерыватель, включенный в цепь управления движущим приводом, отличающийся тем, что, с целью упрощения конструкции, он снабжен ограничителем движения кулачкового вала, П-образная подвижная вилка выполнена с выступом, предназначенным для отвода собачки от храпового колеса, и подпружинена движущей пружиной, собачка закреплена на неподвижном основании, а прерыватель установлен с возможностью взаимодействия с ограничителем движения кулачкового вала, при этом цепь управления движущим приводом подключена к включающему приводу.
2.Командоаппарат по п.1, о т л и- чающийс я тем, что он снабжен неподвижным упором для ограничителя движения кулачкового вала, а указанный ограничитель выполнен в виде кулачковой шайбы, которая закреплена
на кулачковом валу.
3.Командоаппарат по пп.1 и 2, отличающийся тем, что используется прерыватель с толкателем, который расположен между ограничителем движения кулачкового вала и неподвижным упором.
9 ////
(9
| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат | 1984 |
|
SU1399833A1 |
| Устройство для управления группой исполнительных механизмов | 1986 |
|
SU1345180A1 |
| Устройство для циклового программного управления | 1987 |
|
SU1603343A1 |
| ГЕНЕРАТОР СИГНАЛОВ ВРЕМЕНИ | 1973 |
|
SU361603A1 |
| Устройство для автоматической передачи по проводам на расстояние показаний метеорологических приборов | 1929 |
|
SU32963A1 |
| Программное устройство | 1981 |
|
SU951277A1 |
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| Работометр транспортного средства | 1986 |
|
SU1394073A1 |
| ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ С ПРИВОДОМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ ДЛЯ ТРЕХПОЗИЦИОННОГО КЛАПАНА | 2007 |
|
RU2350816C1 |
| Прибор для определения количества выработанной бумаги | 1961 |
|
SU146955A1 |
Изобретение относится к электротехнике и может быть использовано для управления группой электрических, пневматических или гидравлических исполнительных механизмов. Цель изобретения состоит в упрощении конструкции. В устройстве вилка 5 подпружинена движущей пружиной 10. Вилка 5 связана с кулачковым валом 4, кулачки которого воздействуют на коммутационные элементы 1. Поворот кулачкового вала на заданный угол осуществляется с помощью храпового механизма. Перемещение вилки 5 осуществляется с помощью включающего привода, например электромагнита 7, через якорь 6. Для уменьшения износа храпового механизма на вилке 5 предусмотрен выступ II,.отводящий собачку 12 от храпового колеса при прямом ходе вилки 5. В устройстве имеется стопор, предназначенный для исключения ложных срабатываний аппарата. 2 з.п. ф-лы, 4 ил. с «
П
- Г251
X//
Редактор Т.Лазоренко
J2 фиг, 4
Составитель Н.Петракова Техред Л.Олийнык
гЬЧ ч
t tpQd-ц
фаг /
/ и/
Н--- б/г. 3
Корректор М.Шароши
| Коммутатор электрического тока | 1972 |
|
SU444260A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
