Изобретение относится к машиностроению и может быть использовано для циклового программного управления сложным технологическим объектом, например станком, промышленным робо- том и другими технологическими установками .
Цель изобретения - упрощение конструкции и повышение надежности,
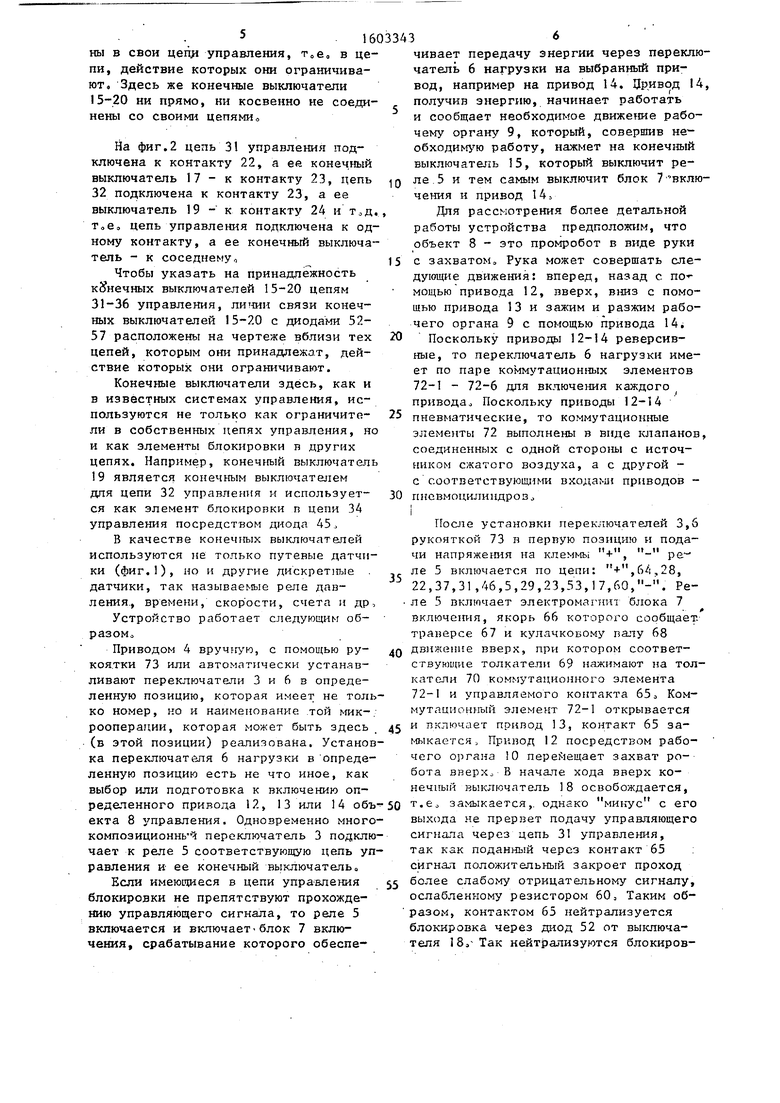
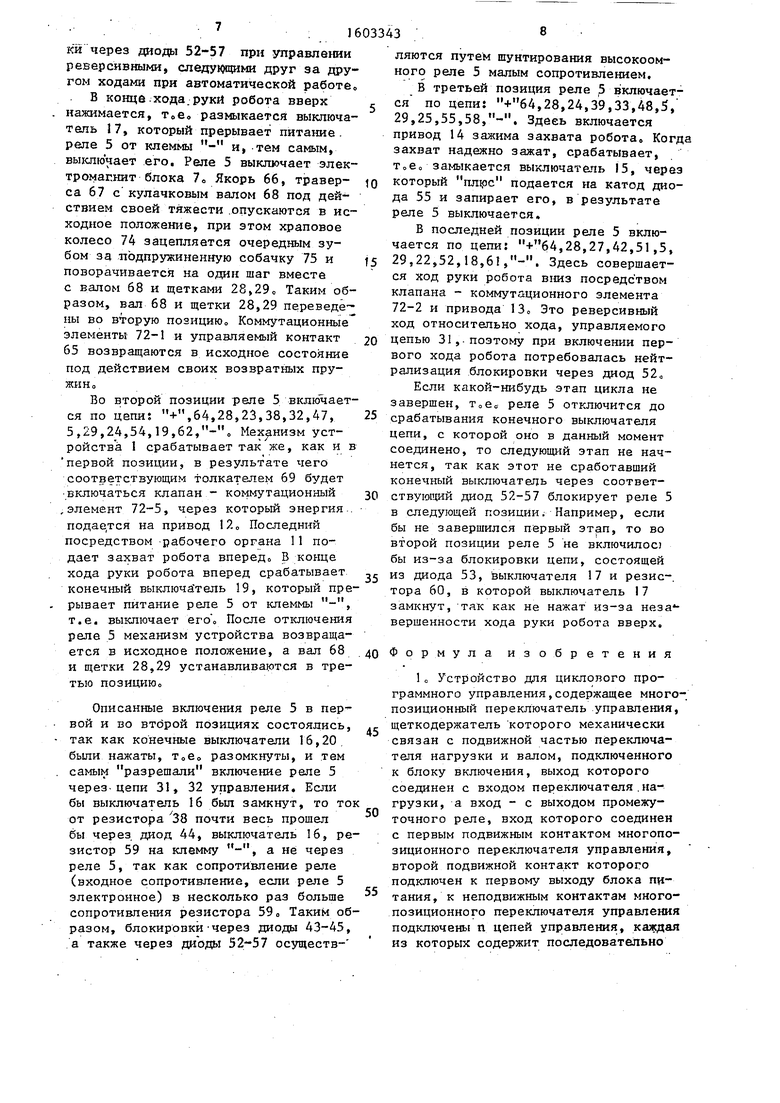
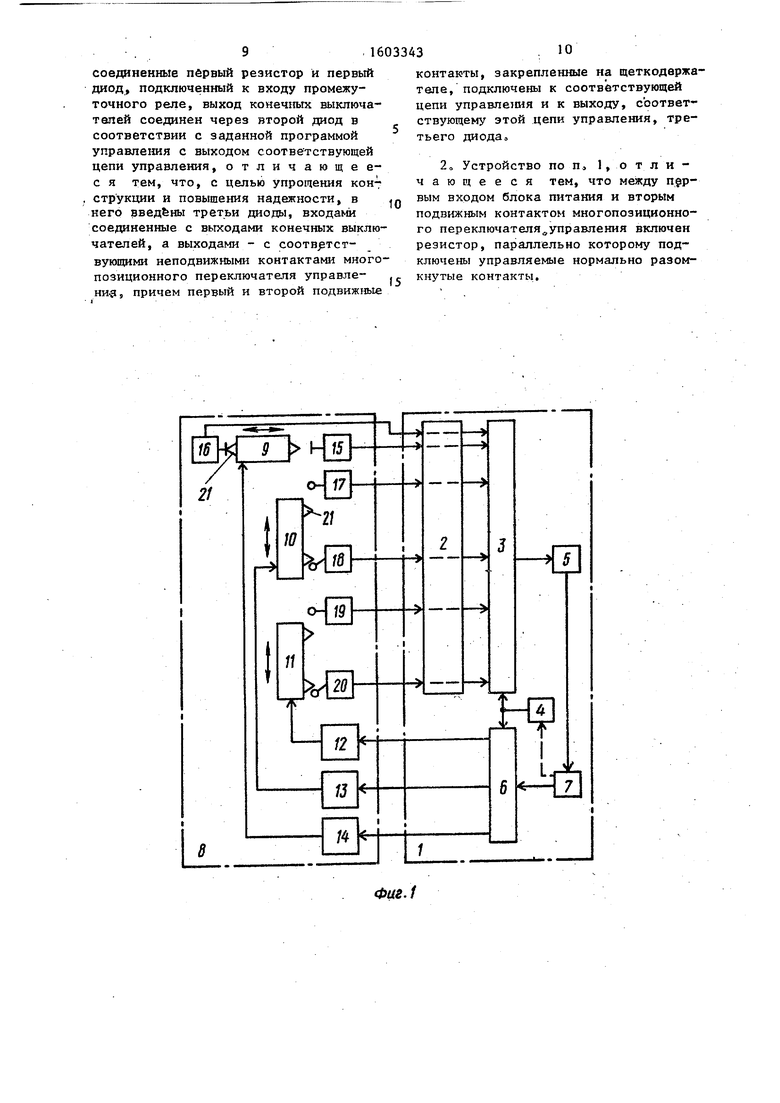
На фиго 1 представлена блок-схема предложенного устройства; на - его электрическая принциальная схема; на фиг .З - вариант выполнения механической части устройства,
Устройство- 1 для циклового программного управления содержит блок, 2 управления, многопозиционный переключатель 3, привод 4, реле 5, переключатель 6 нагрузки, блок 7 включения. Кроме того, на чертежах показаны объект 8 у :равления, рабочие орг аны 9-П которого снабжены приводами I2-14, конеч 1Ъ е выключатели 5- 20, управляющие элементы 21,. которые могут быть выполнены в виде кулачков, толкателей 1ши зкрацирующих (шажков, в зависимости от конструкции приме- няемь х конечных выключателей, неподвижные контакты 22-27, первый и второй подвижные контакты 28 и 29, закрепленные на щеткодержателе 30, связанном с приводом 4, цепи 31-36 управления, первые резисторы 37-42, первые диоды 43-45., вторые диоды 46- 51, третьи диоды 52-57, вторые резисторы 58-63, резистор 64, управляемый контакт 65, якорь 66, П-образная траверса 67, кулачковый вал 68, толкатели 69-7 , коммутационные элементы 72-1, 72-2, 72-3, 72-4, 72-5,
О5 О
со N 00
. 16 72-6, рукоятка 73, храповое колесо подпружиненная собачка 75, неподвижная ось 76, вертикальные направляющие 77.
Чтобы диоды 52-57.использовать не только как элемент связи между реле 5 и соответствующим конечным выключателем через щетку 29, но и как :элемен блокировки, обеспечивающей контроль завершенности соответствующих этапов цикла, последовательно с щеткой 28 включен реэистор 64, равный по величине резистору 37-42. Поскольку эти блокировки Нужны при автоматичес- кой работе, а при наладочном (ручном) режиме управления могут быть излишними, поэтому резистор 64 зашунтирован управляемым контактом 65о Управление контактом 65 может быть ручным или автоматическим, реализуемым известными средствами, В частности, он может быть контактом переключателя нагрузки
В механической части устройства циклового программного управления (фиг.З/ блок 7 включения выполнен в виде электромагнита , якорь 66 которого закреплен на П-образной траверсе 67, концы которой являются опорами вращения кулачкового вала 68 переключателя 6 нагрузкио На валу 68 путем опредапенной расстановки толкателей 69 записана программа автоматической работы управляемого объекта Толкатели 69 сопряжены с толкателями 70, 71 коммутационных элементов 72-1 - 72-6 и управляемого контакта 65 переключателя 6, Толкатели 70 связаны с подвижными контактами или клапанами коммутационных элементов, а толкатели 71 - с защелками, если они имеются и служат для удержания коммутационных элементов во включенном состоянии о
На валу закреплень рукоятка 73, щеткодержатель 30 и храповое колесо 74, с которым взаимодействует подпружиненная, собачка 75, установленная на неподвижной оси 76 Храповой механизм, состоящий из храпового колеса 74, подпружиненной собачки 75, неподвижной оси 76, представляет собой простейший вариант конструкции движущего привода 4. tl-образнай траверса 67 установлена в вертикальных : направляющих 77 с. возможностью возвратно-поступательного движения
0 ла
343 ,
п 5
о
5
5
0
5
0
Цикл работы управляемого объекта состоит из отдельных технологических микроопераций, например из элементарных движений рабочих органов: вверх,
вперед подвод
зажим,
вниз,
отвод,
и ТоП
Цикл автоматической работы устройства циклового программного управления состоит из основных этапов, реализующих упомянутые микрооперации, и. вспомогательных этапов, предназначенных для реализации нужд самой системы управления К вспомогательным относятся такие этапы, как Пуск цикла, Включение задержки, выдержки времени Проскок, во время которого происходит пропуск некоторых этапов общего цикла, Стоп цик5
Возврат устройства в исходное состояние и др
Цикл работы документально, представляется в виде циклограммы, , графически или в виде таблицы - перечня этапов цикла в том порядке, в каком они будут реализованы на практике Согласно циклограмме подключаются цепи 31-36 управления к многопозиционному переключателю 3 и распределяются толкатели 69 по поверхности кулачкового вала 68
Кроме этого, ДЛИ каждого управляемого объекта составляется программа блокировок, в соответствии с которой вводятся в блок 2 управления диоды 43- 45 и другие элементы блокировки Программа блокировок определяет условия; при которых реализуется циклограмма, т.е. условия, при которых работа на объекте будет безопасной, безаварийной и качественной
Вспомогательные этапы здесь не рассматриваются подробно потому, что, во-первых, эти этапы физически реализуются также, как и основные этапы, во-вторых, эти этапы-и средства их реализации являются известш .тми для всех управляюпшх устройств
Блок 2 управления состоит из цепей 31-36 управления, каждая из которых обеспечивает управление опреде ленным этапом цикла, отдельной микрооперацией. Каждая цепь управления имеет конечный выключатель, ограничитель ее действия. В традицион- ных релейных схемах конечные выключатели непосредственно или через средства размножения сигналов включё
10
15
20
25
ны в свои цеди управления, Тово в цепи, действие которых они ограничиват. Здесь же конечные выключатели 15-20 ни прямо, ни косвенно не соединены со своими цепямио
На фиг.2 цепь 31 управления подключена к контакту 22, а ее конеч.ный выключатель 17 - к контакту 23, цепь 32 подключена к контакту 23, а ее выключатель 19 - к контакту 24 и т,д., т„е, цепь управления подключена к одному контакту, а ее конечньй выключатель - к соседнемуо
Чтобы указать на принадлежность конечных выключателей 15-20 цепям 31-36 управления, литши связи конечных выключателей 15-20 с диодами 52- 57 расположены на чертеже вблизи тех цепей, которым они принадлежат, действие которых они ограничивают.
Конечные выключатели здесь, как и в известных системах управления, используются не только как ограничито- ли в собственных цепях управления, но и как элементы блокировки в других цепях. Например, конечный выключатель 19 является конечным выключателем для цепи 32 управления и используется как элемент блокировки п цепи 34 управления посредством диода 45 о
В качестве конечных выключателей используются не только путевые датчики (фиг.1), но и другие дискрет1&1е датчики, так называе№1е реле давления., времени, скор ости, счета и др.
Устройство работает следующим об- разоМо
Приводом 4 вручрг ю, с помощью рукоятки 73 или автоматически устанавивают переключатели 3 и 6 в опредеенную позицию, которая имеет не только номер, но и наименование .той мик-. ооперации, которая может быть здесь 45 (в этой позиции) реализована. Установа переключателя 6 нагрузки в опредеенную позицию есть не что иное, как выбор или подготовка к включению оп30
35
40
редепенного привода 12, 13 или 14 объ-50 -е- замыкается,, однако
0
5
0
5
чивает передачу энергии через переключатель 6 нагрузки на выбранный привод, например на привод 14. Цривод 4, получив энергию, начинает работать и сообщает необходимое движение рабочему органу 9, который, совершив не- обходим ю работу, нажмет на конечный выключатель 15, который выключит реле 5 и тем самым выключит блок 7 включения и привод 14,
Для рассмотрения более детальной работы устройства предположим, что объект 8 - это промробот в виде руки с захватом Рука может совершать следующие движения: вперед, назад с по- мощью привода 12, вверх, вниз с помощью привода 13 и зажим и разжим рабочего органа 9 с помощью привода 1А. Поскольку приводы 12-14 реверсивные, то переключатель 6 нагрузки имеет по паре коммутацион Л)1х элементов 72-1 - 72-6 для включения каждого приводао Поскольку приводы 12-14 пневматические, то коммутационные элементы 72 выполнены в виде клапанов, соединенных с одной стороны с источником сжатого воздуха, а с другой 30
с соответствующими пнсвмоцилиидрозо
входами приводов 5
5
0
После установки переключателей 3,6 рукояткой 73 в первую позицию и подачи напряжения на клеммы +, - реле 5 включается по цепи: -,64,28, 22,37,31,46,5,29,23,53,17,60,-. Реле 5 включает электромагнит блока 7 включения, якорь 66 которого сообщает- траверсе 67 и кулачковому валу 68 движение вверх, при котором соответствующие толкатели 69 нажимают на толкатели 70 коммутационного элемента 72-1 и управляемого контакта 65о Ком- мyтaцнoн rый элемент 72-1 открывается и включает привод 13, контакт 65 замыкается Привод 12 посредством рабочего органа 10 перейещает захват робота вверх., В начале хода вверх конечный выключатель 18 освобождается.
миь-ус
с его

| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат | 1984 |
|
SU1399832A1 |
| Командоаппарат | 1984 |
|
SU1399833A1 |
| Устройство для управления группой исполнительных механизмов | 1986 |
|
SU1345180A1 |
| Коммутатор электрического тока | 1972 |
|
SU444260A1 |
| ЭЛЕКТРОННО-УПРАВЛЯЕМЫЙ БЛОКИРУЕМЫЙ ДИФФЕРЕНЦИАЛ С СИСТЕМОЙ УПРАВЛЕНИЯ, РАСПОЛОЖЕННОЙ ПОД ПРИБОРНОЙ ПАНЕЛЬЮ | 2010 |
|
RU2548830C2 |
| Устройство коммутации электрических цепей | 1972 |
|
SU481949A1 |
| Устройство для автоматического повторного включения масляных выключателей | 1982 |
|
SU1101947A1 |
| Установка для окраски каблуков (ее варианты) | 1983 |
|
SU1214076A1 |
| Устройство для управления автоматической сменой заготовок на токарных станках с числовым программным управлением | 1985 |
|
SU1275374A1 |
| Устройство для адресования транспортного средства с электроприводом | 1987 |
|
SU1431988A2 |
Изобретение относится к машиностроению и может быть использовано для управления сложным технологическим объектом, например станком любого назначения, роботом. Цель изобретения - упрощение конструкции и повышение надежности. Устройство содержит блок управления, многопозиционный переключатель, реле, переключатель перегрузки, привод, реле включения, управляющие элементы, которые могут быть в виде кулачков, толкателей или экранирующих флажков, а также первые и вторые диоды, первые и вторые резисторы, коммутационные элементы, храповое колесо, П-образную траверсу, управляемый контакт, токосъемные щетки, закрепленные на щеткодержателе, связанном с приводом, цепи управления. 1 з.п.ф-лы, 3 ил.
екта 8 управления. Одновременно много- композиционным переключатель 3 подключает к реле 5 соответствующую цепь управления и- ее конечный выключатель с, Если имеющиеся в цепи управления блокировки не препятствуют прохождению управляющего сигнала, то реле 5 включается и включаетблок 7 включения, срабатывание которого обеспевыхода не прервет подачу управляющего сигнала через цепь 31 управления, так как поданный через контакт 65 : сигнал положительный закроет проход J5 более слабому отрицательному сигналу, ослабленному резистором 60, Таким об- разом, контактом 65 нейтрализуется блокировка через диод 52 от выключателя 18о- Так нейтрализуются блокиров10
.: 1603343
ки через диоды 52-57 при управлении еверсивными, следун)щими друг за другом ходами при автоматической работе,
В конце-хода.руки робота вверх ажимается, т,е, размыкается выключаель 17, который прерывает питание, еле 5 от клеммы - и, тем самым, ыключает его. Реле 5 выключает элекромагнит блока 7о Якорь 66, травера 67 с кулачковым валом 68 под дейтвием своей тяжести .опускаются в исодное положение, при этом храповое олесо 74 зацепляется очередным зуом за подпружиненную собачку 75 и оворачивается на один шаг вместе валом 68 и щетками 28,29о Таким обазом, вал 68 и щетки 28,29 переведеы во вторую позицию Коммутационнь1е лементы 72-1 и управляемый контакт 5 возвращаются в исходное состояние од действием своих возвратных пруин
Во второй позиции реле 5 включается по цепи; +,64,28,23,38,32,47, 25 5,29,24,54,19,62,- Механизм устройства 1 срабатывает так же, как и в первой позиции, в результате чего соответствующим толкателем 69 будет включаться клапан - коммутационный элемент 72-5, через который энергия., подается на привод 12 Последний осредством рабочего органа 11 подает захват робота вперед В конце хода руки робота вперед срабатывает конечный выключа тель 19, который прен
5 с п з Т
к
20
45
рывает питание реле 5 от клеммы -, т.е. выключает его После отключения реле 5 механизм устройства возвращается в исходное положение, а вал 68 и щетки 28,29 устанавливаются в третью позицию
Описанные включения реле 5 в первой и во второй позициях состоялись, так как конечные выключатели 16,20, были нажаты, Тое, разомкнуты, и тем самым разрешали включение реле 5 через-цепи 31, 32 управления. Если бы выключатель 16 бьш замкнут, то ток от резистора 38 почти весь прошел бы через, диод 44, выключатель 16, резистор 59 на клемму -, а не через реле 5, так как сопротивлеш1е реле (входное сопротивление, если реле 5 электронное) в несколько раз больше сопротивления резистора 59 Таким образом, блокировки-через диоды 43-45, а также через диоды 52-57 осуществдаре
ча
ts 29 ся кл хо це во ра за ср це со не ко ст в бы вт бы
35 из то за ве
30
40 Ф
гр по ще св те к со
50
гр то с зи вт по та по по из
8
0
5
ляются путем шунтирования высокоом- ного реле 5 малым сопротивлением.
В третьей позиция реле 5 включает- ся по цепи: ,28,24,39,33,48,5, 29,25,55,58,-. Здесь включается привод 14 заясима захвата робота. Когда захват надежно зажат, срабатывает, Тоео замыкается выключатель 15, через
который подается на катод дио0
да 55 и запирает его, в результате реле 5 выключается.
В последней позиции реле 5 включается по цепи: ,28,27,42,51,5,
s 29,22,52,18,61,-. Здесь совершается ход руки робота посредством клапана - коммутационного элемента 72-2 и привода 13 Это реверсивный ход относительно хода, управляемого цепью 31,. поэтому при включении первого хода робота потребовалась нейтрализация блокировки через диод 52 Если какой-нибудь этап цикла не завершен, т„е, реле 5 отключится до срабатывания конечного выключателя цепи, с которой оно в данный момент соединено, то следующий этап не начнется, так как этот не сработавший конечный выключатель через соответствующий диод 52-57 блокирует реле 5 в следующей позиции. Например, если бы не завершился первый этап, то во второй позиции реле 5 не включилоо бы из-за блокировки цепи, состоящей
5 из диода 53, выключателя 17 и резис-, тора 60, в которой выключатель 17 замкнут, так как не нажат из-за вершенности хода руки робота вверх.
0
Фор мула изобретения
1 о Устройство для циклового программного управления, содержащее много- позиционный переключатель управления, щеткодержатель которого механически связан с подвижной частью переключателя нагрузки и валом, подключенного к блоку включения, выход которого соединен с входом переключателя.на
грузки, а вход - с выходом промежуточного реле, вход которого соединен с первым подвижным контактом многопозиционного переключателя управления, второй подвижной контакт которого подключен к первому выходу блока питания, к неподвижным контактам многопозиционного переключателя управления подключены п цепей управления, каждая из которых содержит последовательно
соединенные первый резистор и первый диод, подключенный к входу промежуточного реле, выход конечных выключателей соединен через второй диод в соответствии с заданной программой управления с выходом соотве тствующей цепи управления, отличающее- с я тем, что, с целью упрощения кон-- струкции и повышения надежности, в него введены третьи диоды, входа соединенные с выходами конечных выключателей, а выходами - с соотвртст- вующими неподвижными контактами многопозиционного переключателя управле- ни-39 причем первый и второй подвижные
контакты, закрепленные на щеткодержателе, подключены к соответствующей цепи управления и к выходу, соответствующему этой цепи управления, третьего диода,
2, Устройство по п 1, о т л и - чаюпдееся тем, что вым входом блока питания и вторым подвижным контактом многопозиционного переключателЯдУправления включен резистор, параллельно которому подключены управляемые нормально разомкнутые контакты.
Фив. 1
. 12-г 72-3 66 77. . N. 1
n 23
Фиг. Z
67
L/.
7г-б 65
.77 .70
| Устройство для управления исполнительными механизмами | 1971 |
|
SU497560A1 |
