с/;
с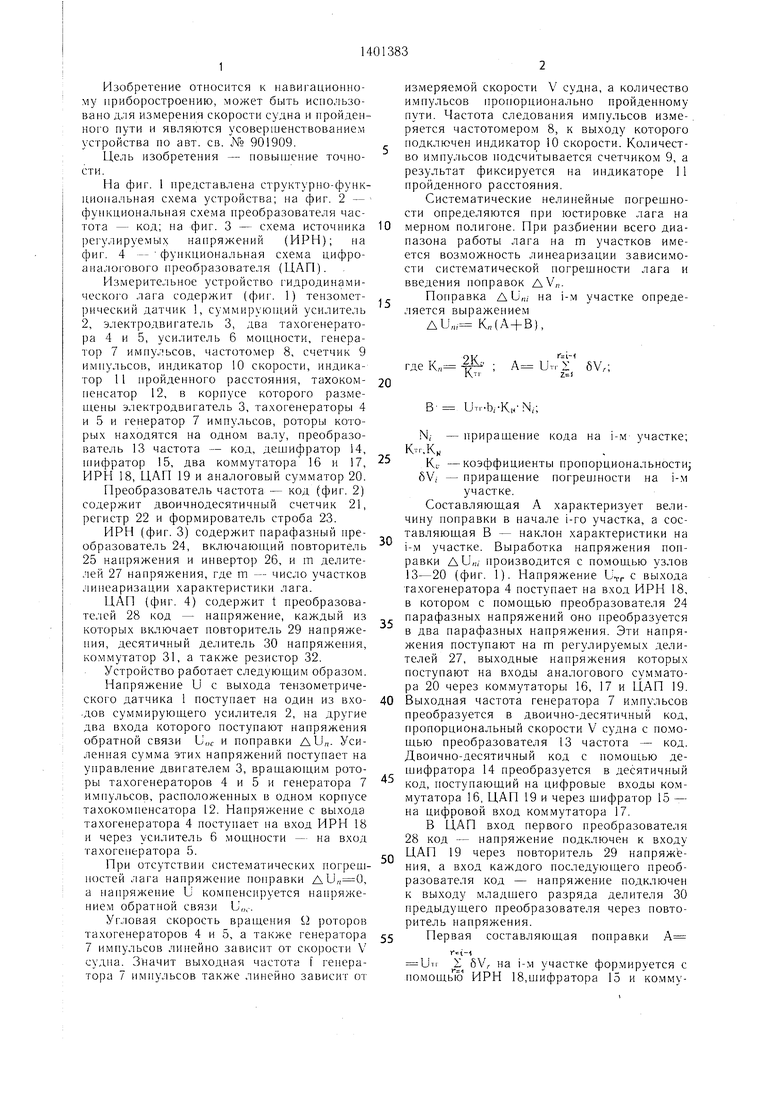
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство лага | 1987 |
|
SU1626156A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1312737A1 |
| Электронный измеритель массы | 1990 |
|
SU1753290A1 |
| СТЕНД ДЛЯ ИЗУЧЕНИЯ ЭЛЕКТРОННЫХ СРЕДСТВ АВТОМАТИЗАЦИИ | 2005 |
|
RU2279718C1 |
| Устройство для поверки фазометров | 1982 |
|
SU1057877A1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1979 |
|
SU1840108A1 |
| Преобразователь кода во временной интервал | 1985 |
|
SU1300637A1 |
| Цифровые крановые весы | 1990 |
|
SU1747936A1 |
| СЧЕТЧИК АКТИВНОЙ ЭНЕРГИИ С ЧАСТОТНЫМ ВЫХОДОМ | 1992 |
|
RU2037830C1 |
| Логарифмический цифроаналоговый преобразователь | 1984 |
|
SU1241476A1 |
Изобретение относится к навигационному приборостроению. Цель изобретения - повышение точности. Систематические нелинейные погрешности определяются при юстировке лага на мерном полигоне. При разбиении всего диапазона работы лага на m участков имеется возможность линеаризации зависимости систематической погрешности лага и введения поиравок. Выработка напряжений поправки производится с помош,ью преобразователя 13 частота - код, дешифратора 14, шифратора 15, коммутаторов 16, 17, источника 18 регулируемы.х напряжений, цифроаналогового преобразователя 19 и сумматора 20. 3 з.п. ф-лы, 4 ил.
со
00
со
N)
Изобретение относится к нави|-ационно- му приборостроению, может быть использовано для измерения скорости судна и пройденного пути и являются усовершенетвованием устройства по авт. св. № 901909.
Цель изобретения - повышение точности.
На фиг. 1 представлена структурно-функциональная схема устройства; на фиг. 2 - функциональная схе.ма преобразователя частота - код; на фиг. 3 - схема источника регулируемых напряжений (ИРН); на фиг. 4 - функциональная схема цифро- анало1-ового преобразователя (ЦАП).
Измерительное устройство гидродинамического лага содержит (фиг. 1) тензомет- рический датчик 1, суммирующий усилитель 2, электродвигатель 3, два тахо|-енерато- ра 4 и 5, усилитель 6 мощности, генератор 7 импульсов, частотомер 8, счетчик 9 импульсов, индикатор 10 скорости, индикатор 11 пройденного расстояния, тахоком- пенсатор 12, в корпусе которого размещены электродвигатель 3, тахогенераторы 4 и 5 и 1-енератор 7 импульсов, роторы кото- находятся на одном валу, преобразователь 13 частота - код, дешифратор 14, шифратор 15, два коммутатора 16 и 17, ИРН 18, ЦАН 19 и аналоговый сумматор 20.
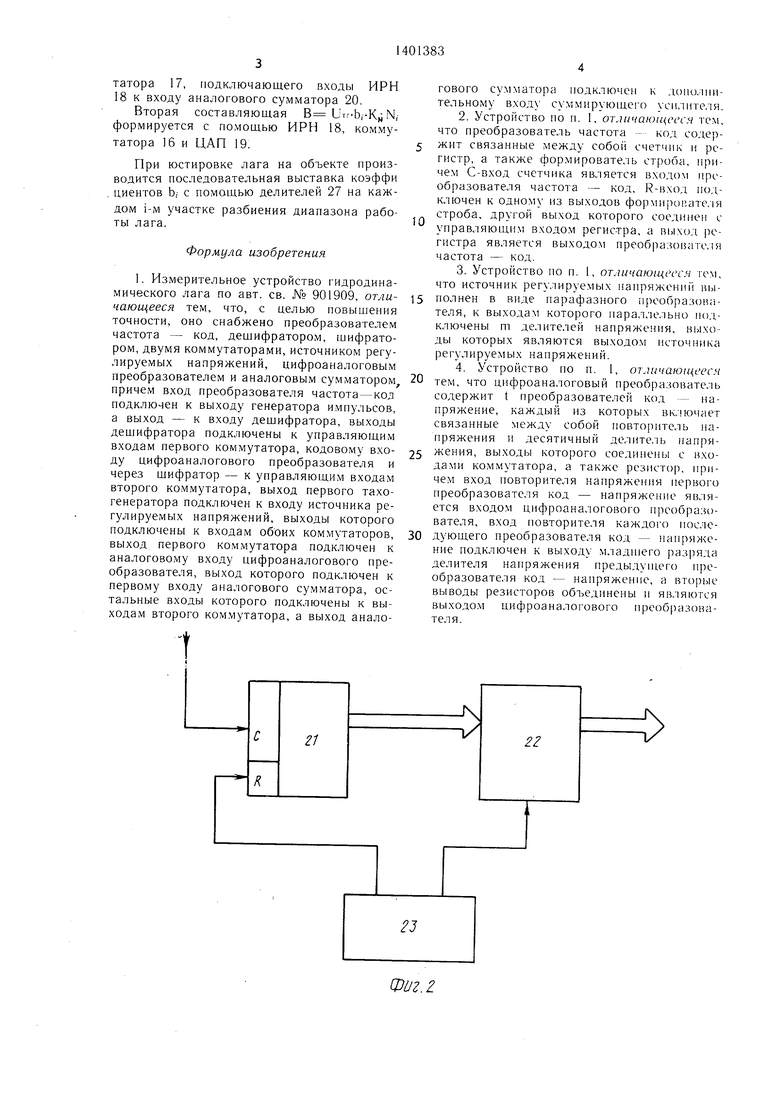
Преобразователь частота - код (фиг. 2) содержит двоичнодесятичный счетчик 21, регистр 22 и формирователь строба 23.
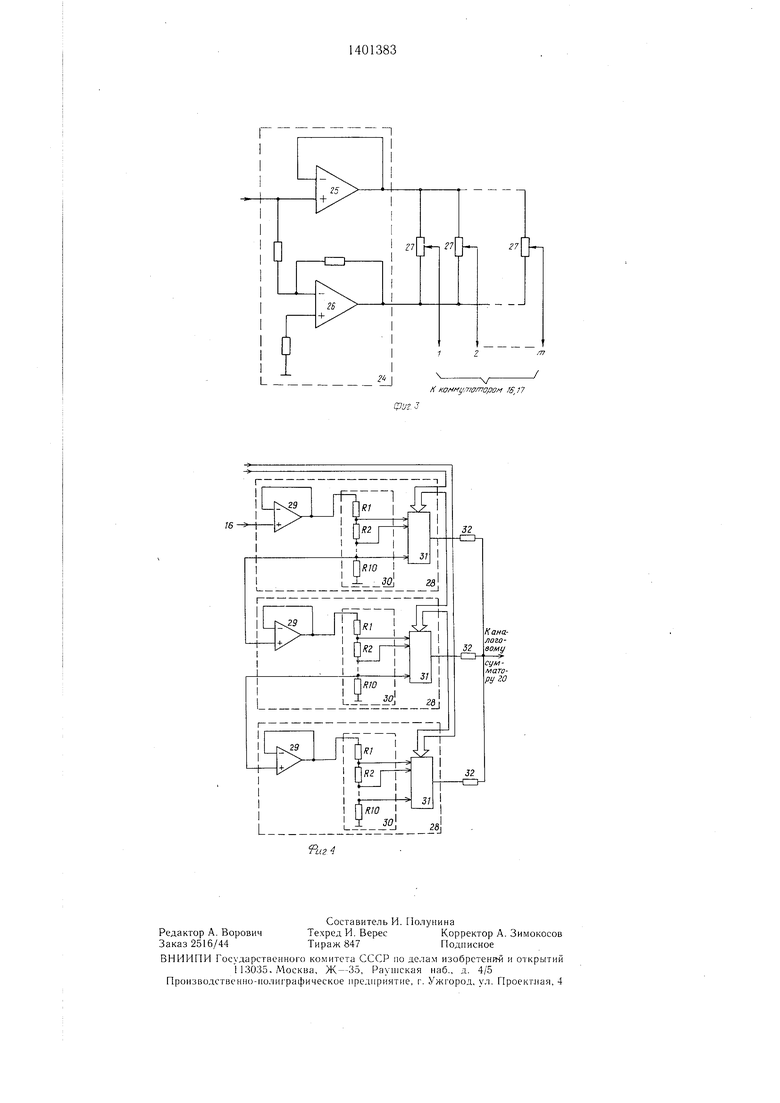
ИРН (фиг. 3) содержит парафазный преобразователь 24, включаюпдий повторитель 25 напряжения и инвертор 26, и m делителей 27 напряжения, где m --- число участков линеаризации характеристики лага.
ЦАП (фиг. 4) содержит t преобразователей 28 код - напряжение, каждый из которых включает повторитель 29 напряже- пия, десятичный делитель 30 напряжения, коммутатор 31, а также резистор 32.
Устройство работает следующим образом.
Напряжение U с выхода тензометриче- ского датчика 1 поступает на один из вхо- .дов суммирующего усилителя 2, на другие два входа которого поступают напряжения обратной связи и„с и поправки AU. Усиленная сумма этих напряжений поступает на управление двигателем 3, вращающим роторы тахогенераторов 4 и 5 и генератора 7 импульсов, расположенных в одном корпусе тахокомпенсатора 12. Нанряжение с выхода тахогенератора 4 поступает па вход ИРН 18 и через усилитель 6 .мощности - на вход тахогеператора 5.
При отсутствии систематических погреш- постей лага папряжепие поправки AU,,G, а напряжение U компенсируется напряжением обратной связи U,,..
Угловая скорость вращения У )оторов тахогенераторов 4 и 5, а также генератора 7 импульсов линейно зависит от скорости V судна. Значит выходная частота f генератора 7 имиульсов также линейно зависит от
измеряемой скорости V судна, а количество импульсов про 10рционально пройденному пути. Частота следования импульсов измеряется частотомеро.м 8, к выходу которого подключен индикатор 10 скорости. Количество импульсов подсчитывается счетчиком 9, а результат фиксируется па индикаторе 11 пройденного расстояния.
Систематические нелинейные погрешности определяются при юстировке лага на мерном полигоне. При разбиении всего диапазона работы лага на m участков имеется воз.можность линеаризации зависимости систематической погрешности лага и введения поправок AV,,.
Поправка Л U,,, на 1-м участке определяется выражением
ли,„ К„(А+В),
20
2К.
гдеК„ ; А UT,-X 6V.;
5
0
5
0
5
0
5
В UT,-.b,-K,/N,;
N,- - приращение кода на i-м участке; Кп,К,
Ко -коэффициенты пропорциональности; (W, - приращение norpenjHOCTn на i-.м участке.
Составляющая А характеризует величину поправки в начале i-ro участка, а составляющая В - наклон характеристики на i-M участке. Выработка напряжения поправки ли„, производится с помощью узлов 13-20 (фиг. 1). Напряжение с выхода тахогенератора 4 поступает на вход ИРН 18, в котором с помощью преобразователя 24 парафазных напряжений оно преобразуется в два парафазных напряжения. Эти напряжения поступают на m регулируемых делителей 27, выходные напряжения которых поступают на входы аналогового сумматора 20 через коммутаторы 16, 17 и ЦАП 19. Выходная частота генератора 7 и.мпульсов преобразуется в двоично-десятичный код, пропорциональный скорости V судна с помощью преобразователя 3 частота - код. Двоично-десятичный код с помощью де- 1пифратора 14 преобразуется в десятичный код, поступающий на цифровые входы ко.м- мутатора 16, ЦАП 19 и через щифратор 15 - на цифровой вход коммутатора 17.
В ЦАП вход первого преобразователя 28 код - напряжение подключен к входу Ц.АП 19 через повторитель 29 напряжения, а вход каждого последующего преобразователя код - напряжение подключен к выходу младшего разряда делителя 30 предыдущего преобразователя через повторитель напряжения.
Первая составляющая поправки А
UTi X 8Vr на i-.M участке фор.мируется с noMOHiblo ИРН 18,шифратора 15 и KOMMVтатора 17, подключающего входы ИРН 18 к входу аналогового сумматора 20.
Вторая составляющая В Утг-Ь.-К N/ формируется с помощью ИРН 18, коммутатора 16 и ЦАП 19.
При юстировке лага на объекте производится последовательная выставка коэффи циентов Ь/ с помощью делителей 27 на каждом i-M участке разбиения диапазона работы лага.
Формула изобретения
0
5
0
гового сумматора подключен к дополнительному входу суммирующего усп. пггеля.
А
2
фиг. г
/f .mafTJopOfi /и; /7
| Измерительное устройство гидродинамического лага | 1980 |
|
SU901909A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
