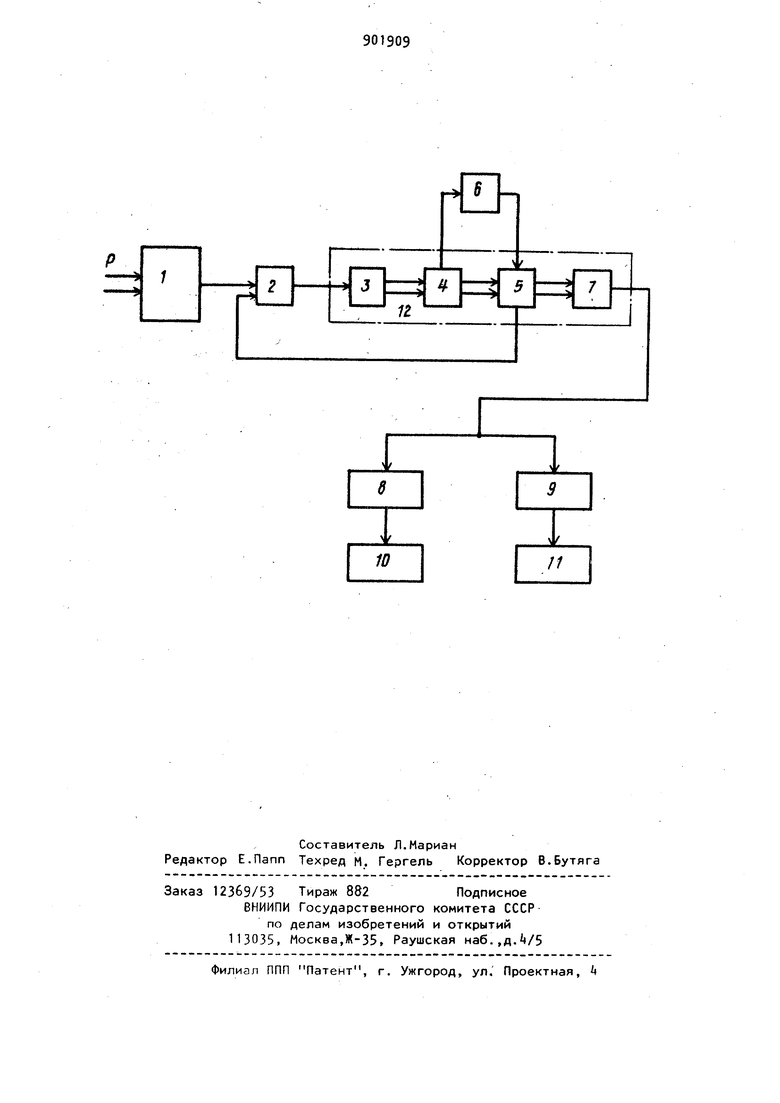
(5) ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ГИДРОДИНАМИЧЕСКОГО Изобретение относится к навигационному приборостроению и может быть использовано для измерения скорости судна и пройденного пути. Известны гидродинамические лаги, которые содержат приемную трубку, сильфон и пружинно-рычажную измерительную систему, включающую в себя рычаг, пружину, датчик положения рычага, усилитель, двигатель, редуктор с эксцентриком квадратичного профиля шкалу и электромеханический интегратор с индикатором пройденного рассто яния 1 . Наличие в измерительной цепи указанных лагов большого количества под вижных элементов вследствии влияния трения, мертвых ходов и т.п. огранич вает возможность повышения точности измерения скорости судна и пройденного им расстояния. Наиболее близким по технической с ности к изобретению является гидроди намический лаг американской фирмы ЛАГА Eastern Со, содержащий тензометрический датчик скорости, электронную измерительную систему и индикатор скорости. Измерительная система представляет собой усилитель постоянного тока, на выходе которого усиленный сигнал тензодатчика, имеющий квадра тичную зависимость от скорости судна, преобразуется методом кусочно-линейяой аппроксимации в напряжение постоянного тока, пропорциональное скорости судна. Возникшее напряжение поступает на индикатор скорости - вольтметр постоянного тока 2. К недостаткам этого устройства относятся наличие схемы прямого (некомпенсационного) метода измерения на постоянном токе, подверженной влиянию таких дестабилизирующих факторов, как изменение параметров напряжения питания, дрейф нуля усилителя, старение элементов, температура окружающей , электрические и магнитные помехи. Кроме того, преобразование квадв линейную меторатичнои зависимости дом кусочно-линейной аппроксимации вн сит значительные систематические погрешности. Указанные недостатки прототипа не позволяют получить точность лучше 2% от верхнего предела измерения скорости. Цель изобретения - повышение точности измерения скорости судна и прой денного расстояния. Указанная цель достигается тем, что измерительная система известного лага снабжена суммирующим усилителем, усилителем мощности и квадратичным тахокомпенсатором, выполненном в виде размещенных на одном валу с двигателем двух тахогенераторов и генератора импульсов, причем выход первого тахогенератора через усилитель мощности подключен к обмотке воз буждения второго тахогенератора, выхо которого подключен ко входу суммирующего усилителя, ко второму входу кото рого подключен выход тензометрическог датчика скорости, выход суммирующего усилителя подключен к обмотке управле ния двигателя, а выход индикаторного устройства подключен к генератору импульсов. При этом индикаторное устройство выполнено в виде двух каналов, один и которых содержит последовательно вклю ченные частотомер и индикатор скорости, а другой - счетчик импульсов и индикатор пути. На чертеже представлена функционал ная схема устройства - измерительная система гидродинамического лага. Устройство содержит тензометрический датчик 1 скорости, суммирующий усилитель 2, электродвигатель 3, два техогенератора t и 5, усилитель 6 мощности генератор 7 импульсов, часто томер 8, сметчик 9 импульсов, индикатор 10 скорости, индикатор 11 пройден ного расстояния. Электродвигатель 3, тахогенераторы 4 и 5 и генератор 7 им пульсов расположены в одном корпусе тахокомпенсатора 12, а их роторы нахо дятся на одном валу. Устройство работает следующим образоч. Тензометрический датчик 1 скорости предназначен для преобразования гидродинамического давления р в пропорциональное ему электрическое напряжение и, т.е. и Кц.р(1) 90 Так как давление р связано со скоростью судна V квадратичной зависимостьюР Kp.vS(2) то напряжение, снимаемое с тензометрического датчика скорости, также пропорционально квадрату скорости судна, т.е. и К,. V(3) В формулах (1), (2) и (З) Ки,Кр, KV - коэффициенты пропорциональности. Выход тензрметрического датчика 1 скорости подключен к одному из входов суммирующего усилителя 2, выход которого подключен к обмотке управления электродвигателя 3 тахокомпенсатора 12. Генераторная обмотка тахогенератора через усилитель 6 мощности подключена к обмотке возбуждения тахогенератора 5. Генераторная обмотка тахогенератора 5 подключена ко второму входу суммирующего усилителя 2. К выходу генератора 7 импульсов одключены индикатор 10 скорости через астотомер 8 и индикатор 11 пройденночерез счетчик 9 импульго расстояния сов. При движении судна на выходе танзо метрического датчика 1 скорости возникает электрический сигнал, величина которого определяется выражением (З). Этот сигнал усиливается суммирующим усилителем 2 и поступает на обмотку управления электродвигателя 3 тахокомпенсатора 12. Ротор электродвигателя 3 приводится во вращение, а вместе с ним и роторы тахогенераторов 4 и 5 и генератора 7 импульсов. На генераторной обмотке тахогенератора 4 возникает напряжение U , величина которого пропорциональна скорости вращения ротора Л , Ктг,-Л. (М где коэффициент пропорциональности. Сигнал, определяемый выражением Cf), через усилитель 6 мощности с коэффициентом усиления Ку подается на обмотку возбуждения тахогенератора 5, на генераторной обмотке которого возникает напряжение и.,; Л К -Л, IVr, ., , К -ггл Сигнал,определяемый выражением (5), подается на вход суммпирующего усилителя 2, где сравнивается с сигналом тензометрического датчика 1 скорости, величина которого определяется выражением (3), т.е.
K.-V K-ft (6) Из выражения (6) следует, что
R -/
(7)
где К;, - коэффициент пропорциональности.
Из выражения (7) следует, что каж ю дому значению измеряемой скорости судна V соответствует установившаяся угловая скорость SI вращения ротора электродвигателя 3, а значит и частота генератора 7 импульсов.is
Таким образом, частота следования импульсов генератора импульсов пропорциональна измеряемой скорости судна V, количество этих импульсов - пройденному судном расстоянию.20
Частота импульсов измеряется частотомером 8, к выходу которого подключен индикатор 10 скорости. Количество импульсов подсчитывается счетчиком 9, а результат фиксируется на индикаторе 25 пройденного расстояния 11.
Формула изобретения
1. Измерительное устройство гидро-зо динамического лага, содержащее тензо-метрический датчик-скорости, измерительную систему и индикаторное устройство, отличающееся тем, что, с целью повышения точности измерения скорости и пройденного расстояния, измерительная система снабжена суммирующим усилителем, усилителем моности и квадратичным тахокомпенсатором, выполненном в виде размещенных на одном валу с двигателем двух тахогенераторов и генератора импульсов, причем выход первого тахогенераУра через усилитель мощности подключен к обмотке возбуждения второго тахогенератора, выход которого подключен ко входу суммирующего усилителя, ко второму входу которого подключен вход тензометрического датчика скорости, выход суммирующего усилителя подключен к обмотке управления двигателя а вход индикаторного устройства подключен к гене ратору импульсов.
2. Устройство по п.1, о т л и чающееся тем, что индикаторное устройство выполнено в виде двух каналов, один из которых содержит последовательно включенные частотомер и индикатор скорости, а другой - счетчик импульсов и индикатор пути.
Источники информации, принятые во внимание при экспертизе
1.бласов И.В.и др. Гидродинамические лаги. Л., 1967, с. 217-337.
2.Патент США ff 3719078,
кл. G 01 С 21/12, 1973 (прототип).
п

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство гидродинамического лага | 1986 |
|
SU1401383A2 |
| Устройство для измерения скорости движения судна | 1986 |
|
SU1530996A1 |
| Измерительное устройство лага | 1987 |
|
SU1626156A1 |
| Гидродинамический компенсационный дифференциальный лаг | 1980 |
|
SU932405A1 |
| ТРЕНАЖЕР ПО УПРАВЛЕНИЮ СУДОВОЙ ЭЛЕКТРОСТАНЦИЕЙ И ГРЕБНОЙ ЭЛЕКТРИЧЕСКОЙ УСТАНОВКОЙ | 1991 |
|
RU2006957C1 |
| Тахогенератор переменного тока | 1977 |
|
SU645083A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1167579A2 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1239683A2 |
| АВТОМАТИЧЕСКИЕ КОНВЕРТЕРНЫЕ ВЕСЫ | 1965 |
|
SU174390A1 |
| Устройство для измерения момента и мощности на валу электрической машины постоянного тока с обмоткой дополнительных полюсов | 1978 |
|
SU781179A1 |