сл
с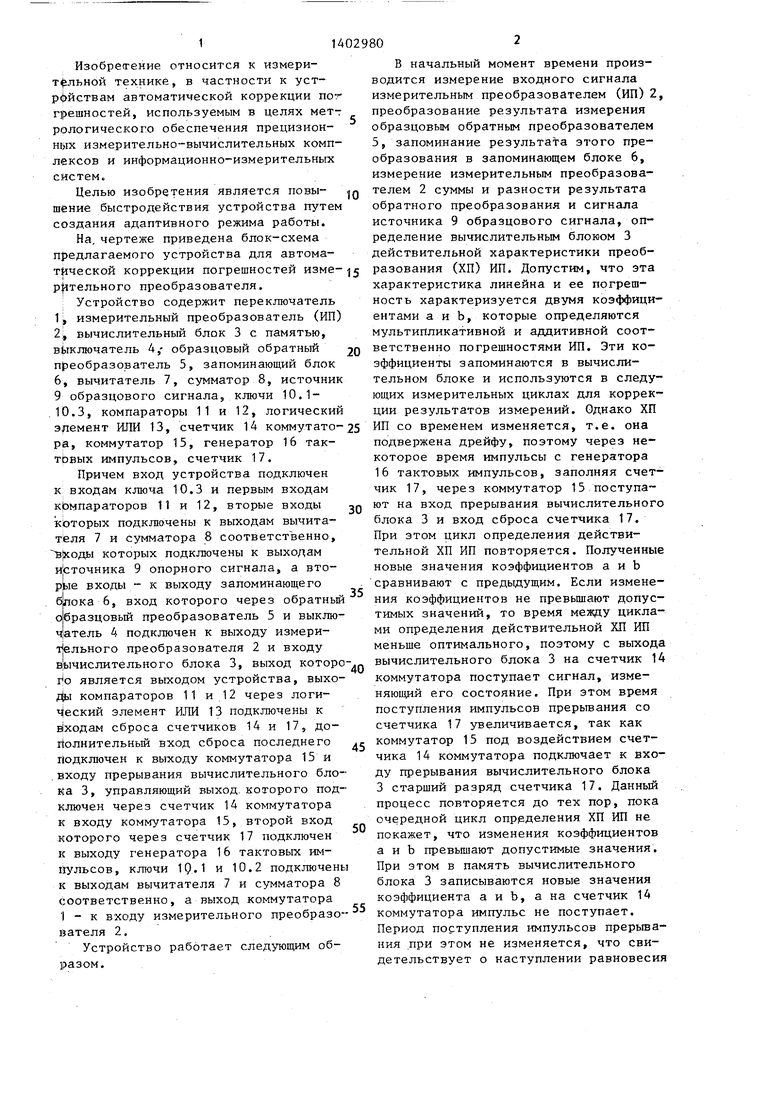
| название | год | авторы | номер документа |
|---|---|---|---|
| Контроллер измерительного преобразователя | 1988 |
|
SU1541632A1 |
| Устройство для измерения и контроля параметров аналого-цифровых преобразователей | 1981 |
|
SU1005297A1 |
| Аналого-цифровой преобразователь с автоматической коррекцией функции преобразования | 1988 |
|
SU1667246A1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2334355C1 |
| Цифровой измерительный прибор | 1980 |
|
SU892309A1 |
| Устройство для автоматической поверки термоэлектрических термометров из неблагородных металлов в динамическом режиме | 1976 |
|
SU657278A1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399156C1 |
| Устройство для передачи телеметрической информации | 1983 |
|
SU1096682A1 |
| Устройство для логарифмирования отношения сигналов | 1985 |
|
SU1300506A1 |
| Устройство для автоматического определения динамических характеристик аналого-цифровых преобразователей | 1985 |
|
SU1288909A1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение быстродействия устройства. Устройство содержит переключатель 1, измерительный преобразователь 2, вычислительный блок 3 с памятью, выключатель 4, образцовый обратный преобразователь 5, запоминающий блок и, вычитатель 7, сумматор 8, источник 9 образцового сигнала и ключи 10.1- 10,3. Введение компараторов 11 и 12, элемента ИЛИ 13, счетчика 14, коммутатора 15, генератора 16 тактовых импульсов и счетчика 17 создает устройству адаптивный режим работы. 1 ил.
ГС
со
СХ)
го
11Д
Изобретение относится к измери- т льной технике, в частности к уст- рбйствам автоматической коррекции пот грешностей, используемым в целях метт рологического обеспечения прецизион- измерительно-вычислительных комплексов и информационно-измерительных систем.
Целью изобретения является повы- шение быстродействия устройства путем создания адаптивного режима работы.
На, чертеже приведена блок-схема п| едлагаемого устройства для автома
тйческой коррекции погрешностей изме- разования (ХП) ИП. Допустим, что эта р телъного преобразователя.
; Устройство содержит переключатель 1, измерительный преобразователь (ИП) 2 вычислительный блок 3 с памятью, вЬжлючатель 4,- образцовый обратный преобразователь 5, запоминающий блок 6, вычитатель 7, сумматор 8, источник 9 образцового сигнала, ключи 10.1- ,10.3, компараторы 11 и 12, логический элемент ИЛИ 13, счетчик 14 коммутато-25 ИП со временем изменяется, т.е. она
характеристика линейна и ее погрешность характеризуется двумя коэффициентами а и Ь, которые определяются мультипликативной и аддитивной соот- 20 ветственно погрешностями ИП. Эти коэффициенты запоминаются в вычислительном блоке и используются в следующих измерительных циклах для коррекции результатов измерений. Однако ХП
ра, коммутатор 15, генератор 16 тактовых импульсов, счетчик 17.
Причем вход устройства подключен к входам ключа 10.3 и первым входам компараторов 11 и 12, вторые входы ткЬторых подключены к выходам вычита- теля 7 и сумматора 8 соответственно,
{ходы которых подключены к выходам и:сточника 9 опорного сигнала, а вто- рЫе входы - к выходу запоминающего бпока 6, вход которого через обратный образцовый преобразователь 5 и выключатель 4 подключен к выходу измери- т|ельного преобразователя 2 и входу вычислительного блока 3, выход которо- Но является выходом устройства, выхо- ф1 компараторов 11 и 12 через логи- Меский элемент ИЛИ 13 подключены к йходам сброса счетчиков 14 и 17, до- йолнительньм вход сброса последнего Подключен к выходу коммутатора 15 и
.входу прерывания вычислительного блока 3, управляющий выход, которого подключен через счетчик 14 коммутатора к входу коммутатора 15, второй вход которого через счетчик 17 подключен к выходу генератора 16 тактовых им- 11ульсов, ключи IQ. 1 и 10.2 подключены к выходам вычитателя 7 и сумматора 8 соответственно, а выход коммутатора
30
35
40
45
50
1 - к входу измерительного преобразо иателя 2.
Устройство работает следующим образом.
-.55
подвержена дрейфу, поэтому через некоторое время импульсы с генератора 16 тактовых импульсов, заполняя счетчик 17, через коммутатор 15 поступа ют на вход прерывания вычислительного блока 3 и вход сброса счетчика 17. При этом цикл определения действительной ХП ИП повторяется. Полученные новые значения коэффициентов а и b сравнивают с предыдущим. Если изменения коэффициентов не превьшают допустимых значений, то время между циклами определения действительной ХП ИП меньще оптимального, поэтому с выхода вычислительного блока 3 на счетчик 14 коммутатора поступает сигнал, изменяющий его состояние. При этом время поступления импульсов прерьшания со счетчика 17 увеличивается, так как коммутатор 15 под воздействием счетчика 14 коммутатора подключает к входу прерывания вычислительного блока 3 старший разряд счетчика 17. Данный процесс повторяется до тех пор, пока очередной цикл определения ХП ИП не покажет, что изменения коэффициентов а и Ъ превышают допустимые значения. При этом в память вычислительного блока 3 записываются новые значения коэффициента а и Ъ, а на счетчик 14 коммутатора импульс не поступает. Период поступления импульсов прерьшания при этом не изменяется, что свидетельствует о наступлении равновесия
В начальный момент времени производится измерение входного сигнала измерительным преобразователем (ИП) 2 преобразование результата измерения образцовым обратным преобразователем 5, запоминание результата этого преобразования в запоминающем блоке 6, измерение измерительным преобразователем 2 суммы и разности результата обратного преобразования и сигнала источника 9 образцового сигнала, определение вычислительным блоком 3 действительной характеристики преобразования (ХП) ИП. Допустим, что эта
ИП со временем изменяется, т.е. она
характеристика линейна и ее погрешность характеризуется двумя коэффициентами а и Ь, которые определяются мультипликативной и аддитивной соот- ветственно погрешностями ИП. Эти коэффициенты запоминаются в вычислительном блоке и используются в следующих измерительных циклах для коррекции результатов измерений. Однако ХП
0
5
0
5
0
5
подвержена дрейфу, поэтому через некоторое время импульсы с генератора 16 тактовых импульсов, заполняя счетчик 17, через коммутатор 15 поступа ют на вход прерывания вычислительного блока 3 и вход сброса счетчика 17. При этом цикл определения действительной ХП ИП повторяется. Полученные новые значения коэффициентов а и b сравнивают с предыдущим. Если изменения коэффициентов не превьшают допустимых значений, то время между циклами определения действительной ХП ИП меньще оптимального, поэтому с выхода вычислительного блока 3 на счетчик 14 коммутатора поступает сигнал, изменяющий его состояние. При этом время поступления импульсов прерьшания со счетчика 17 увеличивается, так как коммутатор 15 под воздействием счетчика 14 коммутатора подключает к входу прерывания вычислительного блока 3 старший разряд счетчика 17. Данный процесс повторяется до тех пор, пока очередной цикл определения ХП ИП не покажет, что изменения коэффициентов а и Ъ превышают допустимые значения. При этом в память вычислительного блока 3 записываются новые значения коэффициента а и Ъ, а на счетчик 14 коммутатора импульс не поступает. Период поступления импульсов прерьшания при этом не изменяется, что свидетельствует о наступлении равновесия
между частото определения действительной ХП ИП и ее дрейфом.
Действительная ХП ИП, определенная коэффициентами а и Ь, обеспечивает высокую точность преобразования внут ри интервала измерения входного сигнала, определяемого суммой и разницей входного сигнала (в. момент определения этой действительной ХП) с сигналом источника 9 образцового сигнала, При выходе входного сигнала за пределы этого интервала погрешность резко возрастает, поэтому такой выход фиксируется компараторами 11 и 12, вы- . ходные сигналы которых через логический элемент ИЛИ 13 производят сброс счетчика 14 коммутатора и счетчика 17. Коммутатор 15 устанавливается в начальное состояние, при котором на вы- 20 ° блока и дополнительному входу
числительный блок 3 поступает сигнал прерьтания и происходит повторное (внеочередное) определение действительной ХП ИП. Так как дрейф ХП ИП на разных ее участках может быть различным, описанный ранее подбор оптимального периода между циклами определения действительной ХП ИП в необходимых случаях может уточняться.
Предлагаемое устройство позволяет повысить быстродействие устройства путем организации адаптивного режима работы, заключающегося в подборе оптимального времени между циклами определения действительной ХП ИП. По сравнению с прототипом быстродействие
увеличивается примерно в 3 раза.
Формула изобретения
Устройство для автоматической кор- рекции погрешностей измерительного преобразователя по авт. св. №900232, отличающееся тем, что, с целью повышения быстродействия, в него введены два компаратора, логи- ческий элемент ИЛИ, счетчик коммутатора и последовательно соединенные генератор тактовых импульсов, счетчик и коммутатор, выход которого подключен к входу прерывания вычислительносброса счетчика, выход логического элемента ИЛИ подключен к входам сброса обоих счетчиков, а управляющий выход вычислительного блока с памятью
25 подключен к вх.оду счетчика коммутатора, выход которого подключен к управляющему входу коммутатора, первые входы компараторов подключены к входу устройства, второй вход первого ком30 nfipaTopa подключен к выходу вычитате- ля, второй вход второго компаратора подключен к выходу сумматора, а выходы компараторов подключены к входам логического элемента ИЛИ.
| Устройство для автоматической коррекции погрешностей измерительного преобразователя | 1980 |
|
SU900232A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
