10
fs
Изобретение относится к робототехнике и может быть использовано при управлении сборочными роботами-манипуляторами.
Целью изобретения является Повьгаге- ние точности устройства.
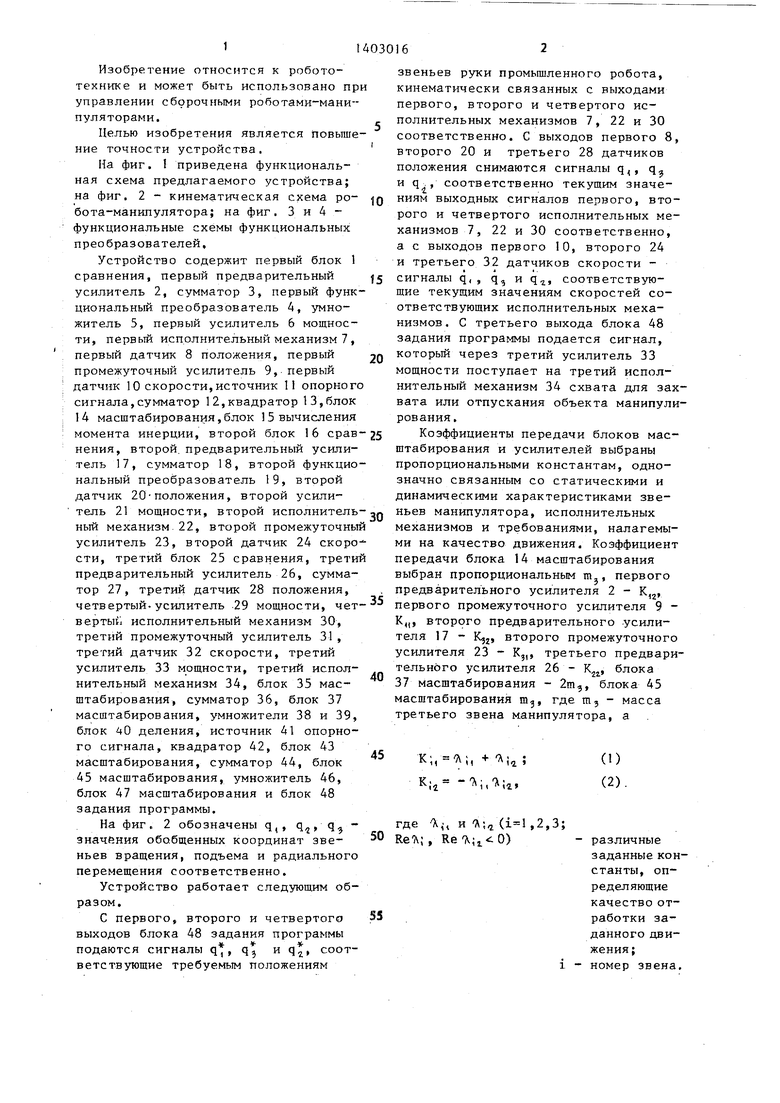
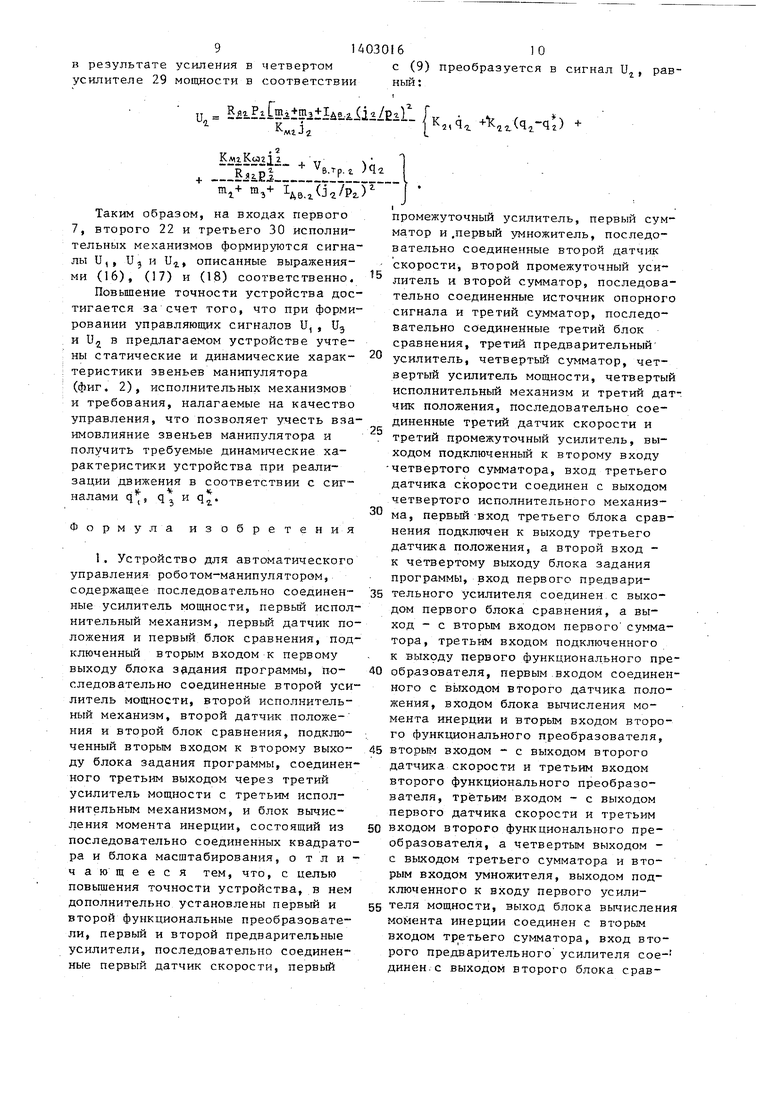
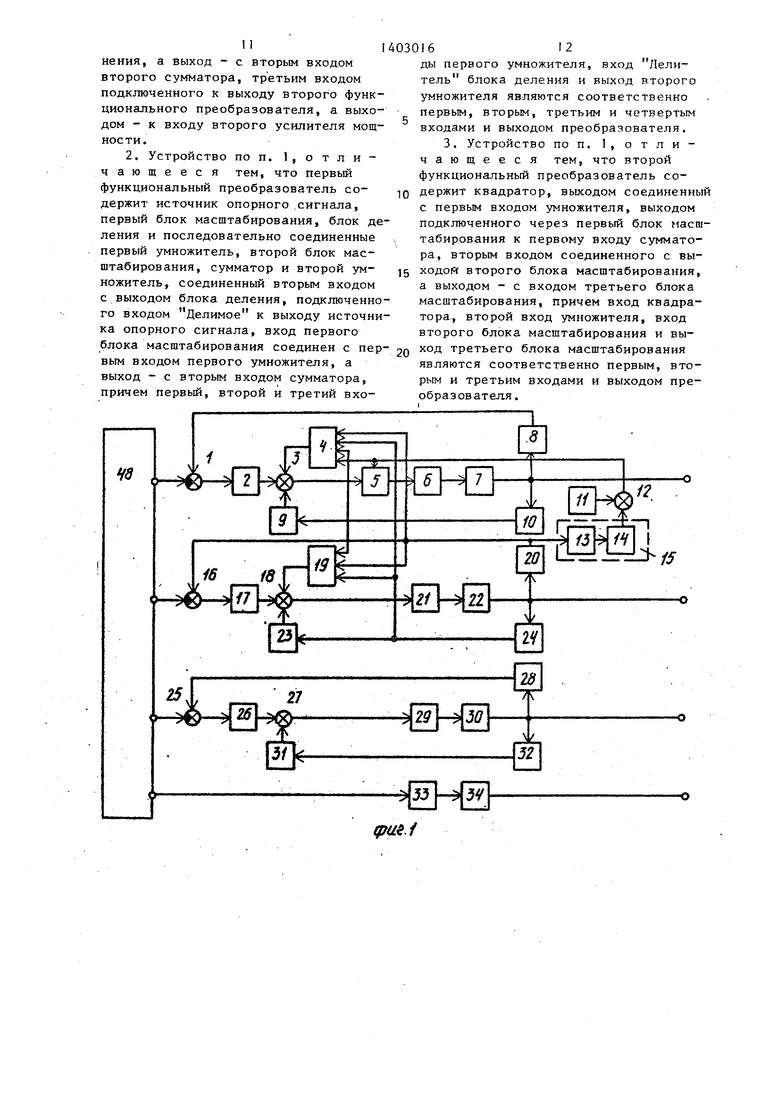
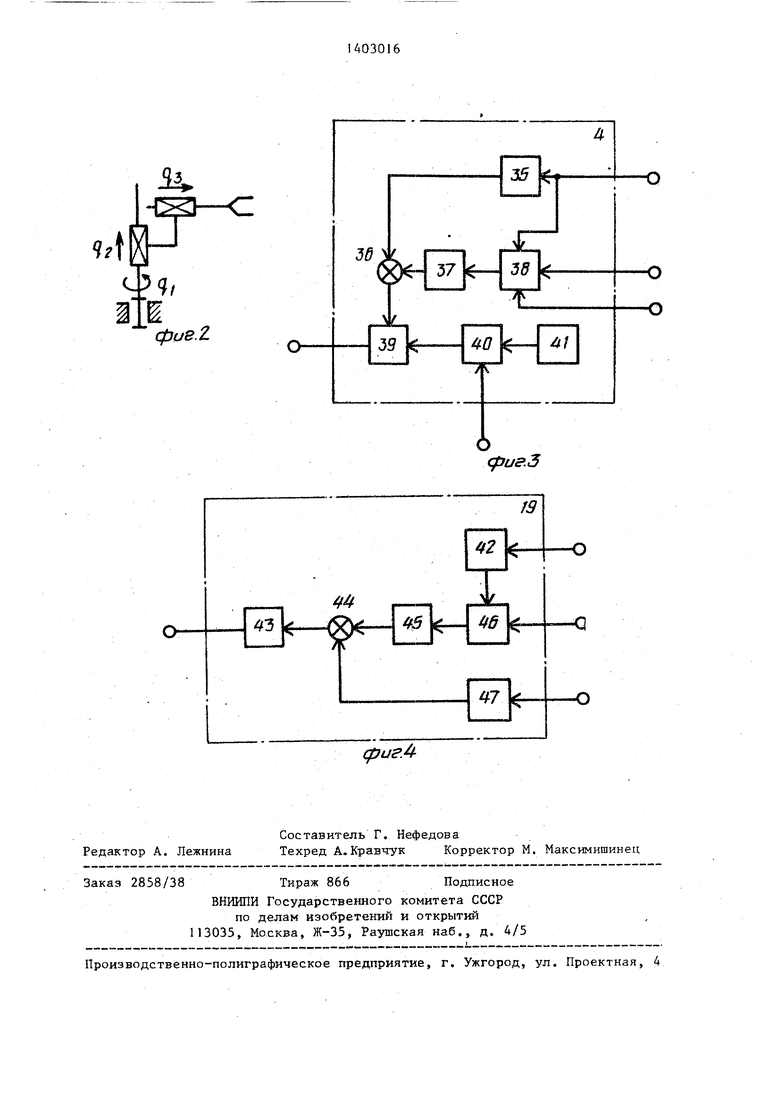
На фиг. 1 приведена функциональная схема предлагаемого устройства; на фиг. 2 - кинематическая схема робота-манипулятора; на фиг. 3 и 4 - функциональные схемы функциональных преобразователей.
Устройство содержит первый блок 1 сравнения, первый предварительный усилитель 2, сумматор 3, первый функ- циональньй преобразователь 4, умножитель 5, первый усилитель 6 мощности, первый исполнительный механизм 7, первый датчик 8 положения, первый 20 промежуточный усилитель 9, первый датчик 10 скорости,источник 11 опорного сигнала, сумматор 12, квадратор 13, блок 14 масштабирования,блок 15 вычисления момента инерции, второй блок 16 срав-25 нения, второй, предварительный усилитель 17, сумматор 18, второй функциональный преобразователь 19, второй датчик 20-положения, второй усили- тель 21 мощности, второй исполнитель-an ный механизм.22, второй промежуточный усилитель 23, второй датчик 24 скоро сти, третий блок 25 сравнения, третий предварительный усилитель 26, сумматор 27, третий датчик 28 положения.
звеньев руки промышлен кинематически связанны первого, второго и чет полнительных механизмо соответственно. С выхо второго 20 и третьего положения снимаются си и q, соответственно т ниям выходных сигналов рого и четвертого испо ханизмов 7, 22 и 30 со а с выходов первого 10 и третьего 32 датчиков сигналы q,, q, и q, с щие текущим значениям ответствующих исполнит низмов. С третьего вых задания программы пода который через третий у мощности поступает на нительный механизм 34 вата или отпускания об рования.
Коэффициенты переда штабирования и усилите пропорциональными конс значно связанным со ст динамическими характер ньев манипулятора, исп механизмов и требовани ми на качество движени передачи блока 14 масш
выбран пропорциональны
40
37 масштабирования - 2т масщтабирования т, гд третьего звена манипул
45
ЧЧ
четвертый-усилитель 29 мощности, чет- первого промежуточного
вертыь исполнительный механизм 30, третий промежуточный усилитель 31, третий датчик 32 скорости, третий усилитель 33 мощности, третий исполнительный механизм 34, блок 35 масштабирования, сумматор 36, блок 37 масштабирования, умножители 38 и 39, блок 40 деления, источник 41 опорного сигнала, квадратор 42, блок 43 масштабирования, сумматор 44, блок 45 масштабирования, умножитель 46, блок 47 масштабирования и блок 48 задания программы.
На фиг. 2 обозначены q,, q, q значения обобщенных координат звеньев вращения, подъема и радиального перемещения соответственно.
Устройство работает следующим образом,
С первого, второго и четвертого выходов блока 48 задания программы подаются сигналы q, q и q, соответствующие требуемым положениям
предварительного усили
К„, второго предварите теля 17 - , второго усилителя 23 - К,,, тре тельного усилителя 26
50
Кч м +
Kjj л i,
где г,ч и Tk; (i ,2,3; , Re 0)
55
1
0
s
0 5 n
звеньев руки промышленного робота, кинематически связанных с выходами первого, второго и четвертого исполнительных механизмов 7, 22 и 30 соответственно. С выходов первого 8, второго 20 и третьего 28 датчиков положения снимаются сигналы q,, q и q, соответственно текущим значениям выходных сигналов первого, второго и четвертого исполнительных механизмов 7, 22 и 30 соответственно, а с выходов первого 10, второго 24 и третьего 32 датчиков скорости - сигналы q,, q, и q, соответствующие текущим значениям скоростей соответствующих исполнительных механизмов. С третьего выхода блока 48 задания программы подается сигнал, который через третий усилитель 33 мощности поступает на третий исполнительный механизм 34 схвата для захвата или отпускания объекта манипулирования.
Коэффициенты передачи блоков масштабирования и усилителей выбраны пропорциональными константам, однозначно связанным со статическими и динамическими характеристиками звеньев манипулятора, исполнительных механизмов и требованиями, налагемы- ми на качество движения. Коэффициент передачи блока 14 масштабирования
выбран пропорциональным т.
37 масштабирования - 2т,, блока 45 масщтабирования т, где т, - масса третьего звена манипулятора, а
первого промежуточного
I первого 2 - К.
предварительного усилителя ix,,
усилителя 9 К„, второго предварительного .усилителя 17 - , второго промежуточного усилителя 23 - К,,, третьего предварительного усилителя 26 - К, блока
Кч м +
Kjj л i,
где г,ч и Tk; (i ,2,3; , Re 0)
1 () (2).
различные заданные константы, определяющиекачество отработки заданногожения; номер звена.
3140
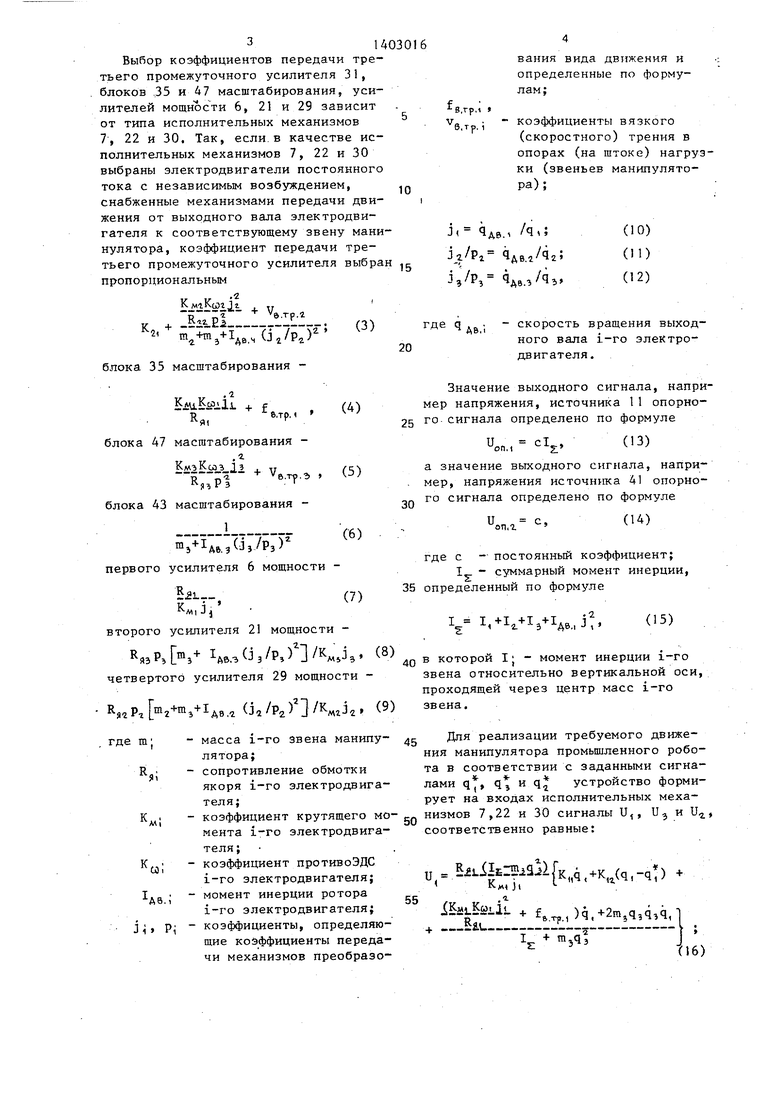
Выбор коэффициентов передачи третьего промежуточного усилителя 31, блоков ,35 и 47 масштабирования, усилителей мощности 6, 21 и 29 зависит от типа исполнительных механизмов 7, 22 и 30, Так, если.в качестве исполнительных механизмов 7, 22 и 30 выбраны электродвигатели постоянного тока с независимым возбуждением, снабженные механизмами передачи движения от выходного вала электродвигателя к соответствующему звену мани- нулятора, коэффициент передачи третьего промежуточного усилителя выбран пропорциональным
B.rp.i 1
6.тр.;
вания вида движения и : определенные по формулам;
коэффициенты вязкого (скоростного) трения в опорах (на штоке) нагрузки (звеньев манипулятора) ;
J Авп PI дв.г/Чг -Ь/РЗ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом манипулятора | 1987 |
|
SU1496999A1 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1764990A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2562400C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |
| ПОДВОДНЫЙ АППАРАТ | 2011 |
|
RU2466055C2 |
| Электрогидравлический следящий привод робота | 1989 |
|
SU1723360A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399080C1 |
Изобретение относится к робототехнике и может быть использовано при управлении сборочными роботами- манипуляторами. Цель изобретения - повышение точности работы. Поставлен.ная цель достигается за счет того, что устройство содержит четыре канала управления: канал управления поворотом, канал управления радиальным перемещением, канал управления подъемом и канал управления охватом. Пер вые три канала построены по двухкон- турной замкнутой схеме, причем внешним контуром является контур управления положением, а внутренним-контур управления скоростью. Четвертый канал построен по разомкну- той схеме. Третий канал выполнен структурно независимым, а первый и второй каналы связаны между собой через функциональные преобразователи, установленные на входах внутренних контуров управления. На входы функциональных преобразователей поступают сигналы с выходов датчиков положения и скорости и с выхода блока вычисления момента инерциил Указанные особенности структурного выполнения устройства позволяет учесть влияние статических и динамических характеристик звеньев манипулятора, исполнительных механизмов и требования к качеству управления и за счет этого повысить точность устройства. 2 з.п. ф-лы. 4 ил. и (Л 00
.2
К мгКсрг г „
К
2(
р .-г б.тр.г
+ .Ei.
та.+га,+1.„, (j,/p,,)
г э Дв.ч --J г блока 35 масштабирования
в.Тр. (
(4)
47 масштабирования - ,г
КмъКсдг i 4. и -г - - v
б.тр. Ь
(5)
43 масштабирования - 1
m
1Ав.,(зУРз)
(6)
первого усилителя 6 мощности -23(7)
к i
второго усилителя 21 мощности .С .- V3(J3/P.), W четвертого усилителя 29 мощности где с - постоянный коэффициент; 1 - суммарный момент инерции.
35 определенный по формуле
1 1,+1 -Из-ыд,„л:
(15)
40 в которой II - момент инерции i-ro звена относительно вертикальной оси, проходящей через центр масс i-ro Е.,,рДт,-ьт,+1д,, (j,/p),, (9) звена.
где т; R
дс Для реализации требуемого движения манипулятора промьшленного робоЯ1
Ml
К
to.
-масса 1-го звена манипулятора;
-сопротивление обмотки якоря i-ro электродвигателя;
-коэффициент крутящего мо- g- низмов 7,22 и 30 сигналы U,, U, и U, мента i-ro электродвига- соответственно равные:
теля;
-коэффициент противоЭДС т, /т -. г
.)
та в соответствии с заданными сигналами q, q и q устройство формирует на входах исполнительных мехаАв.,
1-го электродвигателя; - момент инерции ротора i-ro электродвигателя; Ji Р; коэффициенты, определяющие коэффициенты передачи механизмов преобразо55
f,)q.+2m,q,q3q,
-- ---- ----+ ffljqf
(16)
где q
Ав,1
20
- скорость вращения выходного вала i-ro электродвигателя.
Значение выходного сигнала, например напряжения, источника I1 опорно- го- сигнала определено по формуле
с1, (13)
и
on.t
30
а значение выходного сигнала, например, напряжения источника 41 опорного сигнала определено по формуле
иол,7.
(14)
где с - постоянный коэффициент; 1 - суммарный момент инерции.
35 определенный по формуле
1 1,+1 -Из-ыд,„л:
(15)
дс Для реализации требуемого движения манипулятора промьшленного робота в соответствии с заданными сигналами q, q и q устройство формирует на входах исполнительных меха
f,)q.+2m,q,q3q,
-- ---- ----+ ffljqf
(16)
.- к,,,,.к,, ,,-,)
. .. 1
т з+1Щ (117рЛ
U RilE.U01lAMii./E.llL к„.К,, (q,-q
(18
, a
/K iSsuii- + V V
.,Ritp|..
,+1д9,/р)
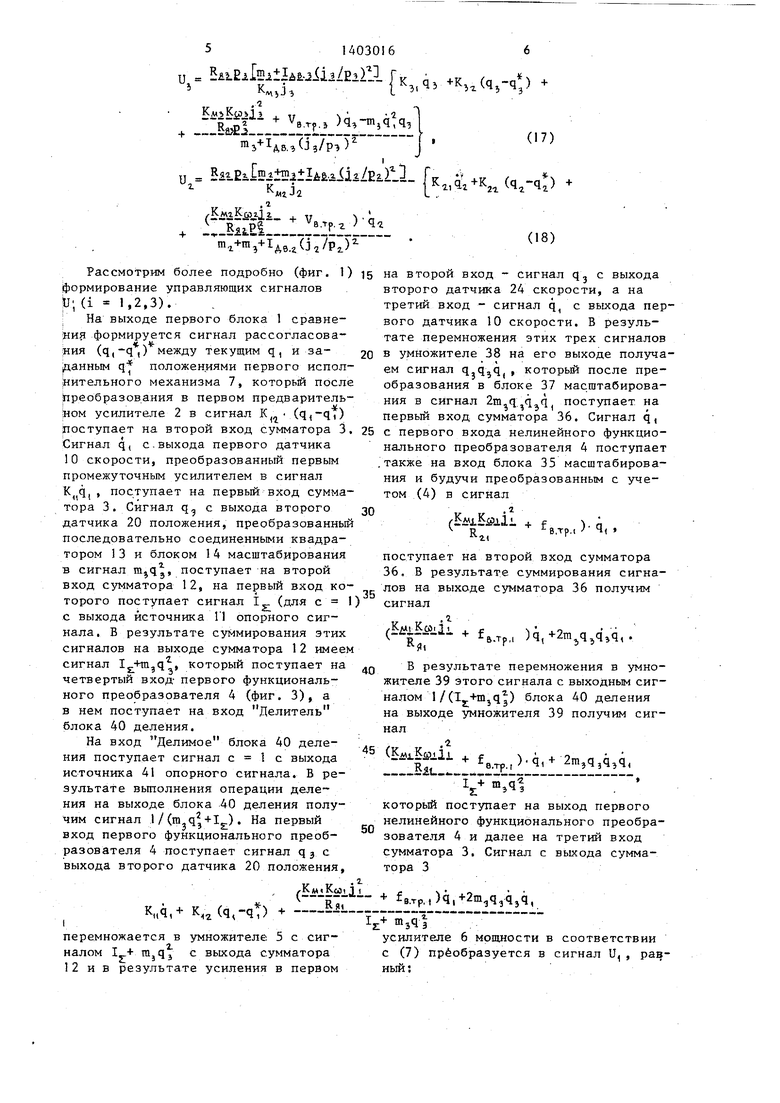
Рассмотрим более подробно (фиг. 1) is на второй вход - сигнал q с выхода
формирование управляющих сигналов Ь; (i 1,2,3).
: На выходе первого блока 1 сравнения формируется сигнал рассогласования (q,-q() между текущим q, и за- 20 |Цанным q положениями первого испол- {ительного механизма 7, который после преобразов.ания в первом предварительном усилитапе 2 в сигнал К„ (q(q) поступает на второй вход сумматора 3, 25 Сигнал 4, с.выхода первого датчика 10 скорости, преобразованный первым промежуточным усилителем в сигнал K,,4i поступает на первьпй вход сумматора 3. Сигнал q с выхода второго зо датчика 20 положения, преобразованный последовательно соединенными квадратором 13 и блоком 14 масштабирования в сигнал , поступает на второй вход сумматора 12, на первый вход которого поступает сигнал I (для с 1) с выхода источника Г1 опорного сигнала. В результате суммирования этих ( сигналов на выходе сумматора 12 имеем сигнал , который поступает на четвертый вход- первого функционального преобразователя 4 (фиг, 3), а в нем поступает на вход Делитель блока 40 деления,
На вход Делимое блока 40 деления поступает сигнал с 1 с выхода источника 41 опорного сигнала, В результате вьшолнения операции деления на выходе блока 40 деления получим сигнал 1/(т q + Ij.), На первый вход первого функционального преобразователя 4 поступает сигнал q j с выхода второго датчика 20 положения.
второго датчика 24 скорости, а на третий вход - сигнал q, с выхода пер вого датчика 10 скорости, В результате перемножения этих трех сигналов в умножителе 38 на его выходе получа ем сигнал ,, которьй после преобразования в блоке 37 мас.штабирова- ния в сигнал 2m, q поступает на первьй вход сумматора 36, Сигнал q, с первого входа нелинейного функционального преобразователя 4 поступает .также на вход блока 35 масштабирования и будучи преобразованным с учетом ,(4) в сигнал
(
, 2
, R,,
+ f
В.тр.
-ч
35
поступает на второй вход сумматора 36. В результате суммирования сигналов на выходе сумматора 36 получим сигнал
KiJ|Kco,iI )4,-b2ni,q,q,q,, Я|
д В результате перемножения в умножителе 39 этого сигнала с выходным сигналом 1/( блока 40 деления на выходе умножителя 39 получим сигнал
.-p:iL il : 22i2i
V
которьй поступает на выход первого нелинейного функционального преобразователя 4 и далее на третий вход сумматора 3. Сигнал с выхода сумматора 3
, г.
I
K,,q,+ к
(. 4 f
,(qr«iT)5 с сигIZ.
V
перемножается в умножителе
2
налом I + mjqj с выхода сумматора 12 и в результате усиления в первом
усилителе 6 мощности с (7) преобразуется ньй;
(17)
q
z) - (18)
на второй вход - сигнал q с выхода
(
второго датчика 24 скорости, а на третий вход - сигнал q, с выхода первого датчика 10 скорости, В результате перемножения этих трех сигналов в умножителе 38 на его выходе получаем сигнал ,, которьй после преобразования в блоке 37 мас.штабирова- ния в сигнал 2m, q поступает на первьй вход сумматора 36, Сигнал q, с первого входа нелинейного функционального преобразователя 4 поступает .также на вход блока 35 масштабирования и будучи преобразованным с учетом ,(4) в сигнал
+ f
В.тр.
-ч
(
оступает на второй вход сумматора 6. В результате суммирования сигналов на выходе сумматора 36 получим сигнал
KiJ|Kco,iI )4,-b2ni,q,q,q,, Я|
В результате перемножения в умножителе 39 этого сигнала с выходным сигналом 1/( блока 40 деления на выходе умножителя 39 получим сигнал
.-p:iL il : 22i2i
V
которьй поступает на выход первого нелинейного функционального преобразователя 4 и далее на третий вход сумматора 3. Сигнал с выхода сумматора 3
V
усилителе 6 мощности в соответствии с (7) преобразуется в сигнал U, , рав- ньй;
„,...,д,.к„(,,-,:
U030168
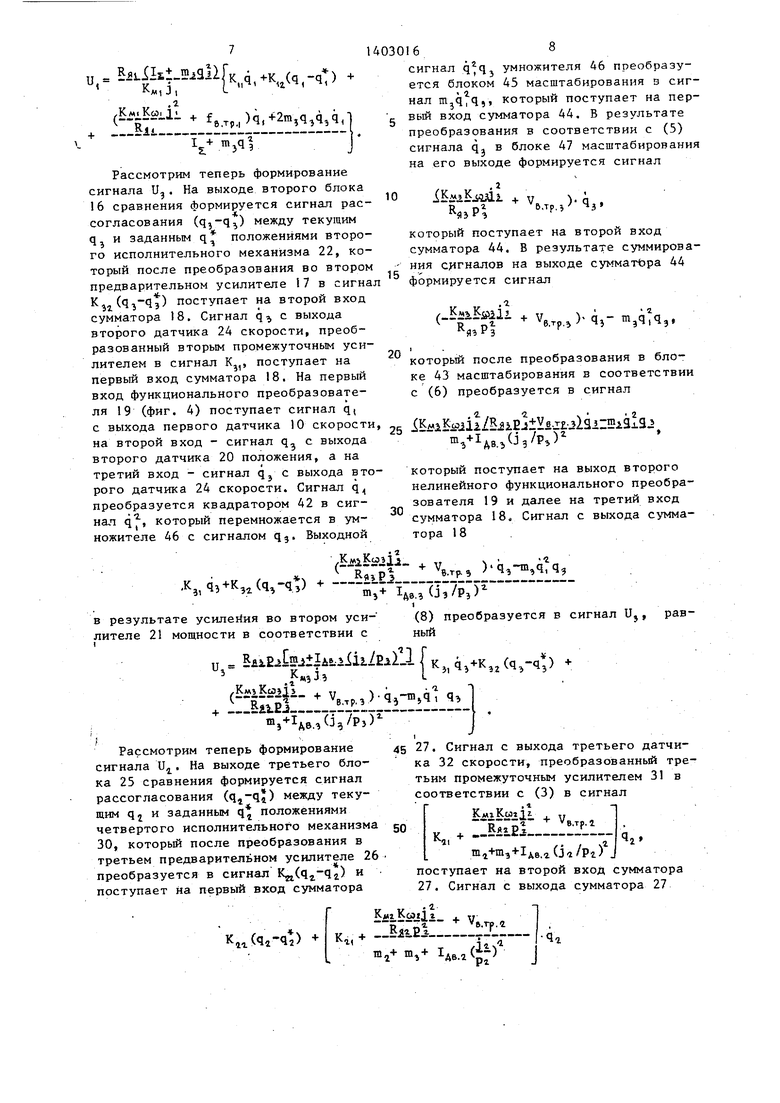
ч сигнал , умножителя 46 преобразуется блоком 45 масштабирования в сигнал m,,, который поступает на пер.1нал mjq.q,, который поступает на пе
( + fg ji I )q, , вый вход сумматора 44. В результате
... «.«.« - х- k rrr onfii acinnatlTjer та г л т-г тчэ гли г- ЧЛ
преобразования в соответствии с (5) сигнала q в блоке 47 масштабирования на его выходе формируется сигнал
Рассмотрим теперь формирование сигнала U. На выходе второго блока 16 сравнения формируется сигнал рассогласования () между текущим q и заданным q положениями второго исполнительного механизма 22, который после преобразования во втором предварительном усилителе 17 в сигна K() поступает на второй вход сумматора 18. Сигнал q с выхода второго датчика 24 скорости, преобразованный вторым промежуточным усилителем в сигнал К,, поступает на первый вход сумматора 18. На первый вход функционального преобразователя 19 (фиг. 4) поступает сигнал qt с выхода первого датчика 10 скорости на второй вход - сигнал q. с выхода второго датчика 20 положения, а на третий вход - сигнал qj с выхода второго датчика 24 скорости. Сигнал q преобразуется квадратором 42 в сигнал 4, который перемножается в умножителе 46 с сигналом qj. Выходной
l;: VPS 4,-m,,
.к„ч,««(ч,-ч1) -ifrt-ci;/;;)
в результате усиления во втором уси- лителе 21 мощности в соответствии с
5яге С| 11л-111/Е.П к, 4,-К,, (q,-q) .
/KMiKcOiij. тт 1
IKil Vp,,) чз
.JjJP3)
Рассмотрим теперь формирование сигнала U. На выходе третьего блока 25 сравнения формируется сигнал рассогласования () между текущим qj и заданным q положениями четвертого исполнительного механизма 30, который после преобразования в третьем предварительном усилителе 26 преобразуется в сигнал ,) и поступает на первь1й вход сумматора
) +
Кг,+
вый вход сумматора 44. В результате
rrr onfii acinnatlTjer та г л т-г тчэ гли г- ЧЛ
преобразования в соответствии с (5) сигнала q в блоке 47 масштабирования на его выходе формируется сигнал
10
R«P ,
Vp,,)
который поступает на второй вход сумматора 44. В результате суммирования с;1гналов на выходе су матЪра 44 формируется сигнал
КЯЗР|
Vp.i) Ч}- эЧ,.
который после преобразования в блоке 43 масштабирования в соответствии с (6) преобразуется в сигнал
iKMiSwiii/5 i2jiYs.ii-jl3iii iai3 ..JS/P.
который поступает на выход второго нелинейного функционального преобразователя 19 и далее на третий вход сумматора 18, Сигнал с выхода сумматора 18
30
(8) преобразуется в сигнал Uj, ный
рав45 27. Сигнал с выхода третьего датчика 32 скорости, преобразованный третьим промежуточным усилителем 31 в соответствии с (3) в сигнал
0
К„ +
КмгКыгД г. IIElLEll
+ V
В.тр. 1
2
щ,1+Щэ+1дв.г(3 г/Рг). поступает на второй вход сумматора 27. Сигнал с выхода сумматора 27
K(tKojiii . т,
-Т
(kf PI
m,+ IA6.7
9U0301610
в результате усиления в четвертом с (9) преобразуется в сигнал U, равусилителе 29 мощности в соответствии ньй:
t
и .PirSfil P3ilAe..iIil/Eir к п +V Гп , ,,Яг (Ча-Чг) +
, 2
5:iJi5 iii« 4- и
. .RjiEi...i :p;
ii г- Q.
Таким образом, на входах первого 7, второго 22 и третьего 30 исполнительных механизмов формируются сигналы U,, и, и и, описанные выражениями (16), (17) и (18) соответственно.
Повышение точности устройства достигается за счет того, что при формировании управляющих сигналов U,, Ug и и в предлагаемом устройстве учтены статические и динамические харак теристики звеньев манипулятора (фиг. 2), исполнительных механизмов и требования, налагаемые на качество управления, что позволяет учесть взаимовлияние звеньев манипулятора и получить требуемые динaм гчecкиe характеристики устройства при реализации движения в соответствии с сиг налами , q и q.
f-
Формула изобретения
20
25
30
35 40455055 промежуточный усилитель, первый сумматор и .первый умножитель, последовательно соединенные второй датчик скорости, второй промежуточный усилитель и второй сумматор, последовательно соединенные источник опорного сигнала и третий сумматор, последовательно соединенные третий блок сравнения, третий предварительный усилитель, четвертый сумматор, четвертый усилитель мощности, четвертый исполнительный механизм и третий датчик положения, последовательно соединенные третий датчик скорости и третий промежуточный усилитель, выходом подключенный к второму входу четвертого сумматора, вход третьего датчика скорости соединен с выходом четвертого исполнительного механизма, первый -вход третьего блока сравнения подключен к выходу третьего датчика положения, а второй вход - к четвертому выходу блока задания программы, вход первого предварительного усилителя соединен.с выходом первого блока сравнения, а выход - с вторым входом первого сумматора, третыйм входом подключенного к выходу первого функционального преобразователя, первым .входом соединенного с вьгходом второго датчика положения, входом блока вычисления момента инерции и вторым входом второго функционального преобразователя, вторым входом - с выходом второго датчика скорости и третьим входом второго функционального преобразователя, третьим входом - с выходом первого датчика скорости и третьим входом второго функционального преобразователя, а четвертым выходом - с выходом третьего сумматора и вторым входим умножителя, выходом подключенного к входу первого усилителя мощности, выход блока вьгчисления момента инерции соединен с вторым входом третьего сумматора, вход второго предварительного усилителя сое- дивен.с выходом второго блока сравч1
нения, а выход - с вторым входом второго сумматора, третьим входом подключенного к выходу второго функционального преобразователя, а выходом - к входу второго усилителя мощности.
ды первого умножителя, вход Делитель блока деления и выход второго умножителя являются соответственно первым, вторым, третьим и четвертым входами и выходом преобразователя.
f/
сригЛ
| СПОСОБ РЕГЕНЕРАЦИИ ОТРАБОТАННЫХ МАСЕЛ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2034910C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Устройство для автоматического управления роботом-манипулятором | 1975 |
|
SU597552A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
