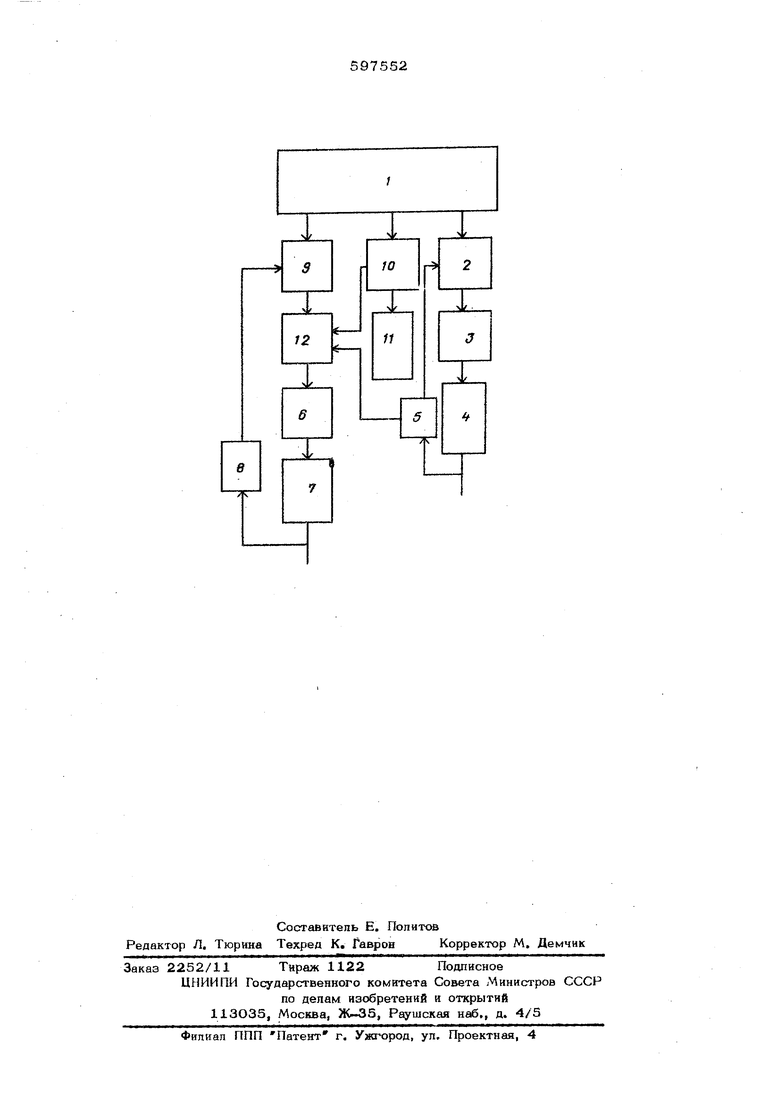
(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОБОТОМ-МАНИПУЛЯТОРОМ приводом схвата и первого датчика обратной связи, соатветргвеннр, а выход - со iexoflOM второго усилителя. На чертеже показана блок-схема описываемого устройства. Оно содержит блок 1 задания программы, первый элемент 2 сравнения, первый усилитель 3, привод 4 радиального переме щения, первый датчик 5 обратной связи, второй усилитель 6, привод 7 вращения, второй датчик 8 обратной связи, второй элемент 9 сравнения, блок 1О управления приводом схвата, привод 11 схвата и блок 12 вычисления момента инерции вращаю шихся частей. В автоматическом цикле работы манипулятора сигналы от блока 1 задания про граммы и датчика 8 обратной связи посту пают в элемент 9 сравнения, где вырабатывается управляющий сигнал U . Этот сигнал поступает на вход блока 12 вычис левия момента инерции вращающихся частей На два других входа блока 12 поступают си налы и от блока управления Ю схватом и D от датчика 5 обратной связи. Величины этих сигналов могут быть записаны следуюишм образом: ); и.К.п. где m - масоа переносимого объекта; nij-j- масса подвижных частей манипу лятора, принимающих участие в рйдиальном перемещении; f - радиус, на котором переносится обьект коэффициенты пропорциональност Кчитьгоая, что момент инерции вращаю щихся частей манипулятора может быть сосчитан по фЪрмуле.,j « mr , величи на сигнала, пропорционального изменению момента инерции, имеет вид ,. Управляющий сигнал U уменьшается блоком 12 пропорционально величине U и, таким образом, окончательный ущэавления, вырабатываемый блоком 12 должен иметь вид, К и, и/ Устройство работает так, что процесс замедления привода 7 вращения начинается прн определенном, однажды установленном значении сигнала ( вырабатываемого блоком 12 вычисления. Это значение достигается тем раньше и, следовательно, дальше от точки позиционирования, чем больше величина сигнала U , характеризующего изменение момента инерпии вращающихся частей манипулятора, Таким образом, оптимизируется время процесса позиционирования. Применение изобретения позволяет существенно повысить производительность автоматических манипуляторов с программным управлением, используемым в производствен11ых процессах путем оптимизации переходных процессов в приводах вращательных координат. Формула изобретения Ус-фойство для автоматического управления роботом-манипулятором, содержащее последовательно соадкненные блок задания программы, первый элемент сравнения, первый усилитель пр{тод радиального перемещения и первый датчик обратной связи, выход которого подключен ко второму входу первого элемента сравнения, и последовательно соединенные второй усилитель, привод вращения, второй датчик обратной связи и второй элемент сравнения, второй вход которого ггодключен ко второму выходу блока задания программы, третий выход которого через блок управления соединен с приводом схвата, о т л и ч а ю щ е ес я тем, что, с целыо еттгймизаций бьгстродействия ус-фойства. Оно содержит блок вычисления момента инерции вращающихся частей, входы которого соединены с выходом второго элемента србшнешш, со вторыми выходами блсжа управления приводом схвата и первого датчика обратной связи, соответственно, а выход - со входом второго усилителя. Источники информации, принятые во внимание при экспертизе: 1.Патент США № 3212649, кл. 214-1, I960. 2.Патент Фравдии № 2034910, кл. В 25 J 9/ОО, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления роботом-манипулятором | 1986 |
|
SU1403016A1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1170428A1 |
| Следящая система с переменным моментом инерции | 1986 |
|
SU1322228A1 |
| Устройство для управления манипулятором | 1986 |
|
SU1333568A1 |
| Устройство для управления электроприводом промышленного робота | 1985 |
|
SU1265691A1 |
| Устройство управления манипулятором робота | 2018 |
|
RU2701459C1 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |