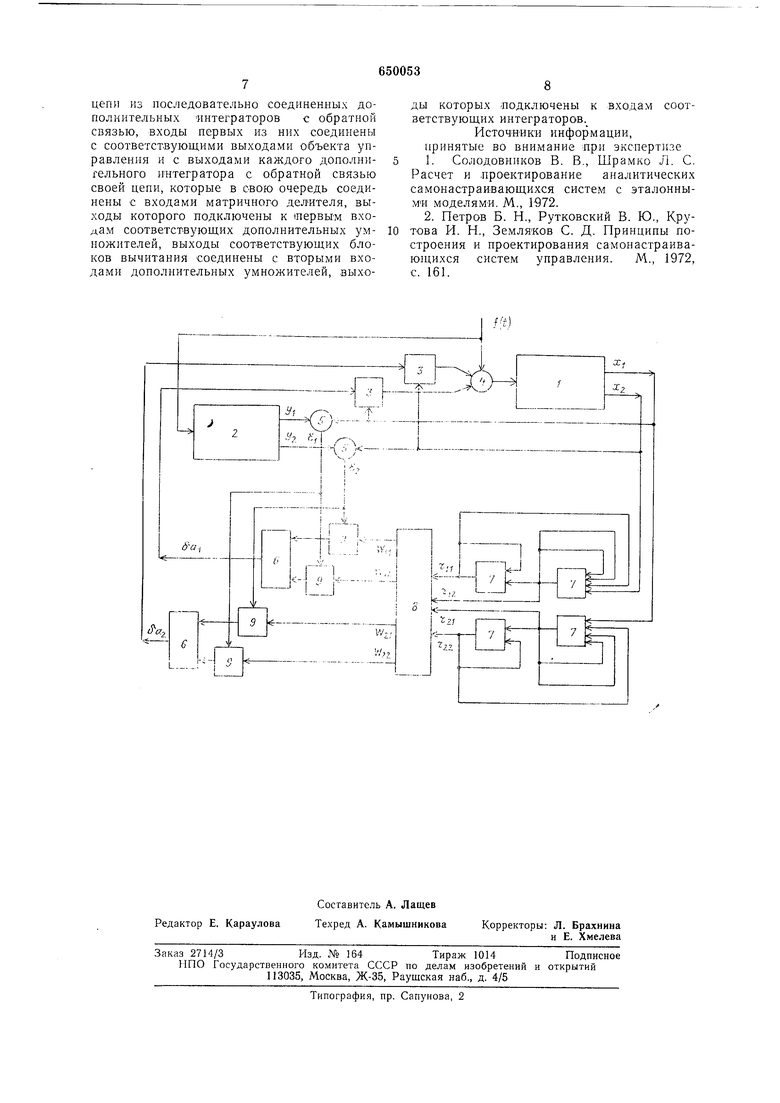
ные цени из последовательно соедииепиых дополнительных интеграторов с обратно; связью; входы первых из них соединены с соответствующими выходами объекта унравлеикя н с выходами каждого дополнительиого интегратора с обратной связью своей цепи, которые в свою очередь соединены с входами матричного дол-нтеля, выходами подключенного к inepBbiM входам соответствующих дополнительных у.множителей. Выходы соответствующих блоков вычитания соединены с вторыми входами дополнительных умножителей, выходы которых подключены к входам соответствующих интеграторов. На чертеже лредставлена схема самонастраивающейся системы управления, в которой объект управления имеет 2-й норядок (N-2). На чертеже приняты обозначения: Объект управления - 1; эталонная модель - 2; умножители - 3; сумматор - 4; блоки вычитания - 6; интеграторы - 6; дополнительные интеграторы с обратной связью - 7; матричный делитель - 8; дополнительные умножители - 9; к, х - выходные координаты объекта 1 управления; г/ь Уг - выходные координаты эталонной модели 2; еь sa - выходные координаты блоков 5 вычитания; боь ба2 - выходные сигналы интеграторов 6; Гц, г, , Г22 - выходные сигналы дополнительных интеграторов 7 с обратной связью; Wn, 12. 2ь 22 - выходные сигналы матричного делителя 8; /(/) - выходной сигнал. Работу самонастраивающейся системы управления можно олисать следующим образом с помощью матричных дифференциальных уравнений. Объект управления x(t) А(х) (О + ЛА + SA(0 А-(0 + F (О, (1) x(Q}-x, где x(t) {xi(t)...Xt,(t)} - вектор выходных координат объекта управления; т - символ транспонирования; А - известная; АЛ - неизвестные постоянные матрицы параметров объекта управления; бЛ(/) - (N Х) - матрица, отличные от нуля элементы которой перестраиваются контуром самонастройки. А, ДЛ и 6Л{/) имеют вид: О 1 ... О гл( О ... О ш, (()... сад,(/) / F(/) 0. ..0/(ОГ-(Л/Х1) - вектор входного воздействия. Уравнение эталонной модели 2 y(i) Aj(f) + r{f), //(0) //,(2) где y(i) iji(t)...ijK{t)- - вектор выходных координат эталонной людели 2. Выходные коорд.ииаты ei,...,K:,- блоков 5 вычитания удовлетворяют уравненню г(0:---Лг(0 + ((0 В(0),(3) /х,(()у,((} Л.(0 У /Да,5а,(0 а (t) (f}. - вектор параметрического рассогласованияX(t) О ... О ,A,(). . .) - (NXN) - матрица. Выходные координаты гц (L, ) ополнительных интеграторов 7 с обратной вязью, удовлетворяют матричному дифференциальному уравнению (О - Л/ (/) + /(/) Л + А-(/), /(0) О, (6) де / diag(Ki,...,KN) - диагональная постоянная (iVXN) - матрица. Перестройка параметров ба(/) произвоится в соответствии с уравнением га WI- а() : W (t) г (t), Ш (0) 0. (7) десь ). Det/( W{t) О , Det; (i) О (О Ла .. (О, Det«(i) де Det/() - определитель матрицы; ) - 1Присоединенная матрица, оставленная из алгебраических дополнеий соответствующего элемента матрицы (t) и транспонированная. Самонастраивающаяся система управлеия, представленная на чертеже, работает ледующим образом. Объект 1 управления для придания ему инамических свойств, заданных эталонной
моделью 2, замкнут обрат 1ыми связями по выходным координатам Xi,...,X:; через первые входы умножителей 3 и сумматор 4.
Блоки 5 вычитания производят сравнение одноименных выходных координат объекта 1 управления и эталонной модели 2 но формуле (4).
Выходная координата Xi объекта управления соединена с входом дополнительного интегратора 7 с обратной связью, стоящего первым в цепи из Л последозателыю соединенных дополнительных интеграторов с обратной связью. Аналогичным образом соединены выходная координата Хо с дополнительным интегратором 7 с обратной связью, стоящим первым во второй цени. Общее число цепей, составленных из Л последовательно соединенных дополнительных интеграторов с обратной связью, равно Л. На чертеже . Каждый выход дополнительных интеграторов с обратной связью, стоящих в одной цепи, соединен со своим входом и с входом первого дополнительного интегратора с обратной связью этой же цепи. Дополнительные интеграторы с обратной связью выполняют интегрирование матричного дифференциального уравнения (6).
Выходные координаты гц (i, ,...,N) дополнительных интеграторов с обратной связью соединены с входами матричного делителя 8, который вычисляет матрицу W(t) по формуле (8).
Выходы Wii матричного делителя 8 соединены с первыми входами соответствующих дополнительных умножителей 9, выходы соответствующих блоков 5 вычитания - с вторыми входами дополнительных умножителей 9, выходы которых подключены к входам соответствующих интеграторов 6.
Дополнительные умножители 9 и интеграторы 6 производят рещение дифференциального уравнения (7).
Выходы интеграторов 6 соединены с вторыми входами соответствующих умножителей 3. В случае, если все или некоторые параметры объекта управления не равны соответствующим параметрам эталонной модели 2, выходные сигналы интеграторов 6 Изменяются таким образом, чтобы свести параметрическое рассогласование (5) к нулю.
Нетрудно Видеть, что выходные координаты е(0 блоков 5 вычитания удовлетворяют наряду с уравнением (3) также и алгебраическому соотнощению
z(t}.R(t)(t.(10)
Матрица R(t) в выражении (10) удовлетворяет уравнению (6) и представляет ту часть в 8(0. которая зависит только от выходных координат x.i(t},...,KK(t), а следовательно, от амплитуды и формы входного воздействия F (t). При этом скорость перестройки параметров 6(0 в известных самонастраиваюгдихся системах также сущееiвекио зависит от вида F(i). Эта занисимость, нежелательная с точки зрения работы самонастраивающейся системы, устраняется в предлагаемом изобретении.
Это легко показать. Действительно, подставляя в выражения (7)., (8) и (10), получаем
«() (0()-W
а (/):-- (О, а (0).(И)
Уравнение (11) имеет рещением векторфункцию
а(0- е--а(0),(12)
где 6(0) - неизвестное начальное параметрическое рассогласован lie.
Предложенная самонастраиваюп1.аяся система может найти применение в тех областях техники, где известные схемы самонастройки ранее не применялись. Она позволяет повысить точность работы за счет получения экспоненциального переходного процесса по каждому из настраиваемых параметров с наперед заданной длительностью, эффекта независимости ироцессов настройки параметров от амплитуды и
формы входных воздействий, устранения влияния процесса настройки в одном из каналов на переходные процессы в остальных, сохранения устойчивости самонастраивающейся системы при любых конечных
начальных отклонениях параметров объекта от параметров эталонной модели. Кроме новыщения точности и расширения области применения, предложенная самонастраивающаяся система управления дает
возмолшость упростить первоначальную наладку систем управления и снизить эксплуатационные расходы.
Формула изобретения
Самонастраивающаяся система управления, содержащая эталонную модель, умножители, сумматор, блоки вычитания и интеграторы, соответствующие выходы объекта управления подключены к первым входам соответствующих умножителей, вторые входы которых соединены с выходами соответствующих интеграторов, а выходы умножителей соединены с входом сумматора, выход которого подключен к входу объекта управления, причем одноименные выходы объекта управления и эталонной модели присоединены к входам блока вычитания, отличающаяся тем, что, с целью увеличения точности системы путем получения экспоненциального переходного процесса по настраиваемым параметрам с наперед заданной длительностью, в нее введены дополнительные интеграторы с обратной связью, дополнительные умножители, матричный делитель и параллельные
цепи из иоследовательно соединенных донолнительных интеграторов с обратной связью, входы первых из них соединены с соответствующими выходами объекта унравления и с выходами каждого дополнигельного ИНтегратора с обратной связью своей цепи, которые в свою очередь соединены с входами матричного делителя, выходы которого подключены к тервьш входам соответствующих дополнительных умножителей, выходы соответствующих блоков вычитания соединены с вторыми входами дополнительных умножителей, выходы которых подключены к входам соответствующих интеграторов.
ИсточиикИ информации, принятые во внимание лри экспертизе 1. Солодовников В. В., Шрамко Л. С. Расчет и .проектирование аналитических самонастраивающихся систем с эталоннымИ моделями. М., 1972.
2. Петров Б. Н., Рутковский В. Ю., Крутова И. Н., Земляков С. Д. Принципы построения и проектирования самонастраивающихся систем управления. М., 1972, с. 161.

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1978 |
|
SU746415A1 |
| Устройство для идентификации параметров систем управления | 1979 |
|
SU885976A1 |
| Самонастраивающаяся система управления | 1981 |
|
SU1008698A1 |
| Самонастраивающаяся система | 1981 |
|
SU1013910A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО С ЭТАЛОННОЙ МОДЕЛЬЮ | 1972 |
|
SU328433A1 |
| Идентификатор параметров и состояния систем управления | 1981 |
|
SU962863A1 |
| Устройство для формирования сигнала управления с оптимальными коэффициентами обратной связи | 1984 |
|
SU1242913A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU935875A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Система последовательного финитного управления конечным состоянием линейных стационарных динамических объектов | 1987 |
|
SU1467534A1 |
