Изобретение относится к управлению электрическими машинами и может быть использовано в робототехничес- ких системах с программным управлением и повышенными требованиями к точности отработки движения.
Цель изобретения - повьпцение устойчивости движения и снижение динамической погрешности.
Cyi iHocTb способа программного управления шаговым электроприводом с коррекцией ошибки отработки траектории заключается в следующем.
Программно-управляемый шаговьй электропривод строится, как правило с использованием электрического дробления шага в сочетании с управляемыми инверторами тока. При этом задание программного движения сводится к программному заданию положения результирующего вектора тока статора 1Г| относительно неподвижных осей статора при поддержании амплитуды вектора тока неизменной.
В этих условиях мгновенное значение механической мощности Рдце развиваемой двигателем, определяется выражением
.1- М
р макс п
з:1п(.9)4-.
dO
где ---- электрическая скорость at
выходного подвижного
элемента;
Р - число пар полюсов; макс максимальный статический синхронизирующий момент;
- мгновенное положение результирующего вектора тока статора;
0 - перемещение выходного подвижного элемента.
I
В приборных робототехнических сис
темах, где возмущающие воздействия на привод детерминированы, можно рас считать требуемый закон программного изменения скорости dQ/dt p p, а также механической мощности Рррог реали зовать их в виде задания, Случайные изменения возмущающих воздействий приведут к отклонениям фактического значения ) °т l npor( t)- Величину P РмеЛ) - Pnpor(t) пользовать для целей коррекции программы движения jf (t) у прог где ду f (йР), и программы механической мощности при случайных наб- росах и сбросах нагрузки.
Механическая мощность, как управляемый параметр обладает следующими преимуществами. Во-первых; она является производной магнитной энергии и отражает ее изменения в поле связи статора и ротора в процессе электро0 механического преобразования. Во-вторых, для целого класса режимов работы со знакопеременным нарушением условий эксплуатации мощность изменяется в ограниченных пределах, что поз5 воляет легко установить эталон сравнения (базу отсчета). При этом устройство регистрации получается в виде нуль-органа, что обеспечивает высокую точность. В -третьиХг использова0 ние мощности в качестве управляемого параметра позволяет не различать физическую природу возмуща шм,его фактора, т.е. происходит ли воздействие из электрической цепи (нарушение пи5 тания), магнитной цепи (зубчатость, ассиметрия магнитопровода) или механической цепи (условия нагружения). В-четвертых, регистрация механической мощности может быть осуществлена
0 в чисто электрическом виде, т,е. без посредства:специальных электромеханических датчиков, что позволяет унифицировать аппаратуру управления замкнутой структурой вне зависимости
от типа двигателя и вида движения,
При соблюдении условий питания обмоток двигателя от источника с характеристиками, близкими к источнику тока с жесткой синуснокосинусной
0 связью между токами фаз
2 - -мочсс
(t); sin y(t) ,
50
55
механическая мощность может быть оп- 45 ределена на основе решения уравнения баланса мощностей
р р + р ллех
Имеются две характерные ситуации, в которых использование мощности в качестве управляющей величины имеет различия: природа нарушения программного режима - периодическая; длительные, необратимые изменения условий эксплуатации типа сброс или наб-.
рос нагрузки.
Эти две ситуации вызвали модификацию способа.
в nc pLUiM cjsynae эталонная величина мощности, принимаемая за базу сравнения и задания, программно остается неизменной Во втором случае программно-заданная мощность подвергается коррекции.
На фиг.1 изображена модель 2-х фазного электродвигателя с независимым возбуждением; на фиг.2 - схемз устройства программного управления; на фиг.З - устройство с коррекцией программно-заданной мощности; на фиг.А (а,б,в) - графики моделирования работы устройства.
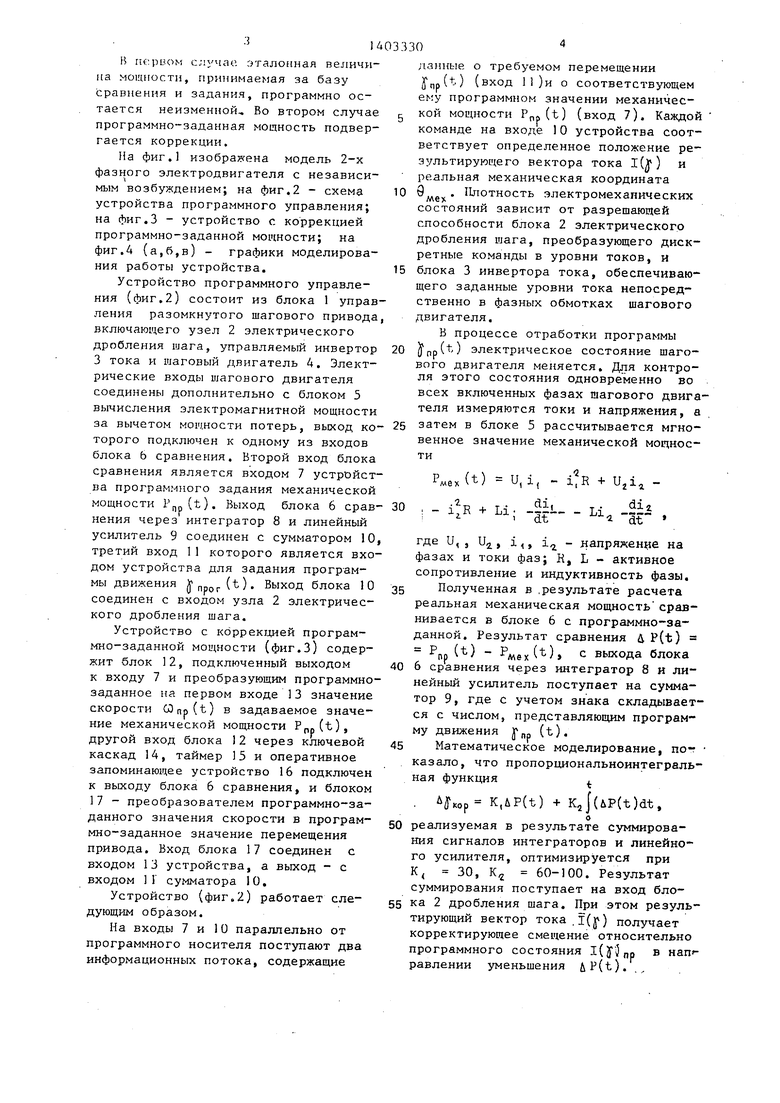
Устройство программного управления (фиг.2) состоит из блока 1 управления разомкнутого шагового привода включающего узел 2 электрического дробления шага, управляемый инвертор 3 тока и шаговый двигатель 4. Электрические входы шагового двигателя соединены дополнительно с блоком 5 вычисления электромагнитной мощности за вычетом мощности потерь, вьсход которого подключен к одному из входов блока 6 сравнения. Второй вход блока сравнения является входом 7 устройства программного задания механической мощности rj,p(t). Выход блока 6 сравнения через интегратор 8 и линейный усилитель 9 соединен с сумматором 10 третий вход 11 которого является входом устройства для задания прогр-ам- мы движения Jnpor Выход блока 10 соединен с входом узла 2 электрического дробления шага.
Устройство с корректдией программно-заданной мощности (фиг.З) содержит блок 12, подключенный выходом к входу 7 и преобразующим программно заданное на первом входе 13 значение скорости OOnpCt) в задаваемое значение механической мощности PpnCt), другой вход блока 12 через ключевой каскад 14, таймер 15 и оперативное запоминающее устройство 16 подключен к выходу блока 6 сравнения, и блоком 17 - преобразователем программно-заданного значения скорости в программно-заданное значение перемещения привода. Вход блока 17 соединен с входом 13 устройства, а выход - с входом 1 сумматора 10,
Устройство (фиг.2) работает следующим образом.
На входы 7 и 10 параллельно от программного носителя поступают два информационных потока, содержащие
данные о требуемом перемещении (t) (вход 11)и о соответствующем ему программном значении механической мощности
Ppp(t) (вход 7). Каждой команде на входе 10 устройства соответствует определенное положение зультирующего вектора тока l() реальная механическая координата
9
Плотность электромеханических
состояний зависит от разрешающей способности блока 2 электрического дробления шага, преобразующего дискретные команды в уровни таков, и блока 3 инвертора тока, обеспечивающего заданные уровни тока непосредственно в фазных обмотках шагового двигателя.
В процессе отработки программы
J j,p(t) электрическое состояние шагового двигателя меняется. Для контроля этого состояния одновременно во
всех включенныхфазах шагового двигателя измеряютсятоки и напряжения, а затем в блоке 5рассчитывается мгновенное значениемеханической мощности
0
- мех .2
(t)
U,i,
- I;R
+ Li
di, dt
Uzi. - dij
- Li --i- i dt
где и, , U, i,, i - напряжен 1е на фазах и токи фаз; К, L - активное сопротивление и индуктивность фазы. Полученная в .результате расчета реальная механическая мощность сравнивается в блоке 6 с программно-заданной. Результат сравнения и P(t)
пр мех( выхода блока 6 сравнения через интегратор 8 И линейный усилитель поступает на сумматор 9, где с учетом знака складывается с числом, представляющим программу движения у„р (t).
Математическое моделирование, nor казало, что пропорциональноинтеграль- ная функция
. K,uP(t) + K2|(uP(t)dt,
о
реализуемая в результате суммирования сигналов интеграторов и линейного усилителя, оптимизируется при K 30, К 60-100. Результат суммирования поступает на вход блока 2 дробления щага. При этом результирующий вектор тoкa.I(л) получает корректирующее смещение относительно программного состояния 1( равлении уменьшения uP(t). ,
В режиме фиксации позиции Упр( Ь) const имеем Гр,р(1) const. Случайные возмущения со стороны нагрузки ;ш1и наличие свободных колебаний рото- ра (последствие) приводят к появлению AP(t), В этом случае канал коррекции выполняет роль демпфирующей цепи.
Устройство (фиг.З) работает еле-, рующим образом,
I На вход 14 поступает программа скорости a)p( t) движения подвижного Элемента. В блоке 17 входная информа- |ция преобразуется в сигнал програм- Цно-заданного перемещения )f пр () и Ьоступает на вход 11 сумматора 10.0д- йовременно в блоке 12 входная инфор- ация преобразуется в сигнал прог- Ьаммно-заданной механической мощнос- ги и поступает на вход 7. I В процессе отработки программы ри воздействии внешних факторов изменяется энергетическое состояние |с1,вигателя, а на выходе, блока 6 срав- ения вырабатывается сигнал рассогласования UP(t), который через интегратор 8 и линейный усилитель 9 в виде приращения Л J (t) суммируется с Программно-заданным значением jTnp) Одновременно сигнал iP(t) поступает
:з оперативное запоминающее устройство 16, в котором осуществляется запоминание амплитудного значения AP(t) и в таймер 15, Через один период фобственных колебаний с момента возмущения по нагрузке, т.е. в момент аремени мгновенное положение йривода совпадает с программным, Ес- Йи в этот момент времени скорректировать программу движения, то переходный процесс прекращается и далее Привод строго подчиняется программе. Если время tp существования разностного сигнала , где Тд - период собственных колебаний привода, to выходной сигнал блока ОЗУ 16 блокируется таймером при прохождении через ключевой каскад 13. Если время Существования помехи tp5 Т , то в соответствии с амплитудой ДР, хранящейся в ОЗУ 16 на выходе блока 13 вырабатывается сигнал, уменьшающий или увеличивающий Р.(t).
Способ управления был исследован методами математического моделирования.
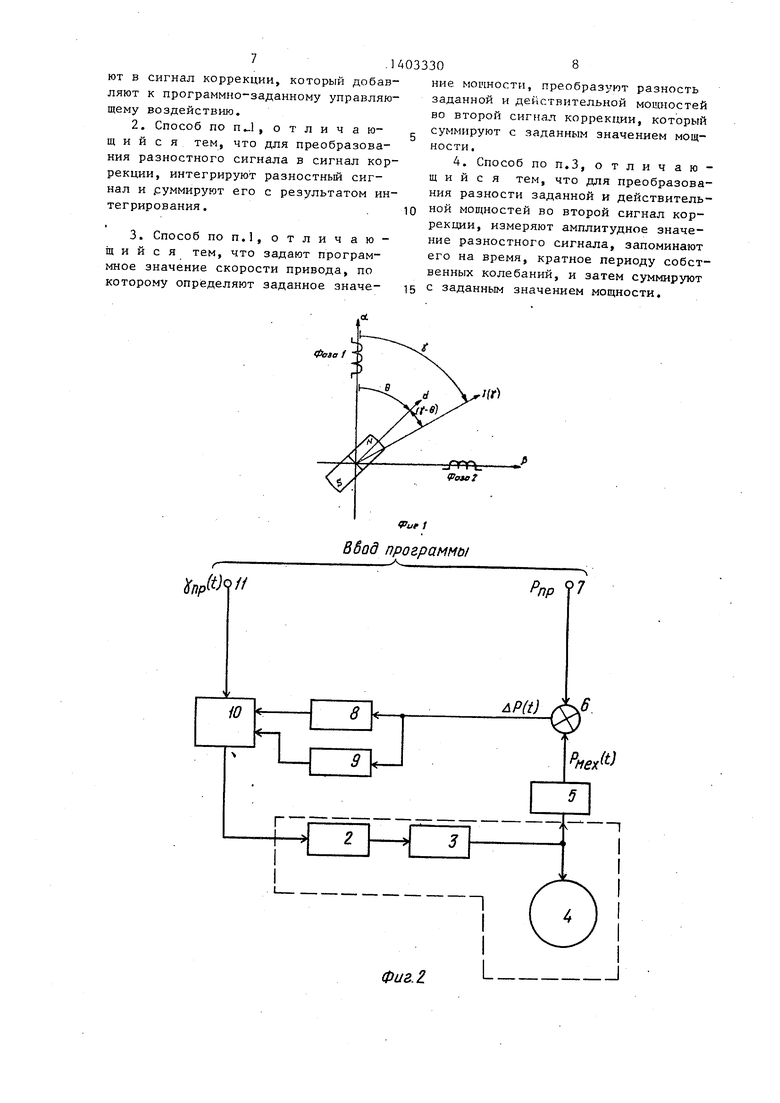
На фиг. 4а приведен график скорости двигателя при отработке заданного
перемещения в условиях соответствия расчетных и фактических параметров привода, где М - относительзюе значение момента нагрузки, график на фиг. 46 иллюстрирует изменение скорости привода без коррекции при отклонении фактического значения момента нагрузки от расчетного (Мрдсц 0,2; Мфа о). Отработка программы сопровождается в этом случае значительными колебаниями мгновенной скорости. Включение корректирующего устройства (фиг.4в) позволяет существенно улучшить качество программного движения.
Применение предлагаемого способа позволит минимизировать динамическую ошибку в условиях случайного отклонения параметров движения от предполагаемых; повысить запас устойчивости движения; при этом способ инвариантен к конструкции исполнительного двигателя и виду движения; создать
условия для унификации элементной базы.
Указанные преимущества показывают, что данный способ управления дает возможность не только отказаться
от применения сложных структур замкнутого привода, оборудованного, как правило, специально сконструированными датчиками обратной связи, но и создать условия для унификации элементной базы привода независимо от конструкции двигателя и вида движения.
Формула изобретения
1„ Способ программного управления приводом, содержащим шаговый электродвигатель, подключенный к управляемому инвертору тока, включающий подачу на вход привода управляющего .воздей- ствия, электрическое дробление шага, сравнение заданного управляемого параметра с его текущим значением и изменение тока инвертора в соответствии с результатом сравнения, отличающийся тем, что, с. целью повышения устойчивости движения и снижения динамической погрешности, в качестве управляемого параметра используют электромагнитную мощность, измеряют напряжения и токи на фазных обмотках двигателя, вычисляют мгновенное значение электромагнитной мощности, сравнивают ее с программно-задан- ньм значением, их разность преобразу-.
РиГ 1
Вбод программы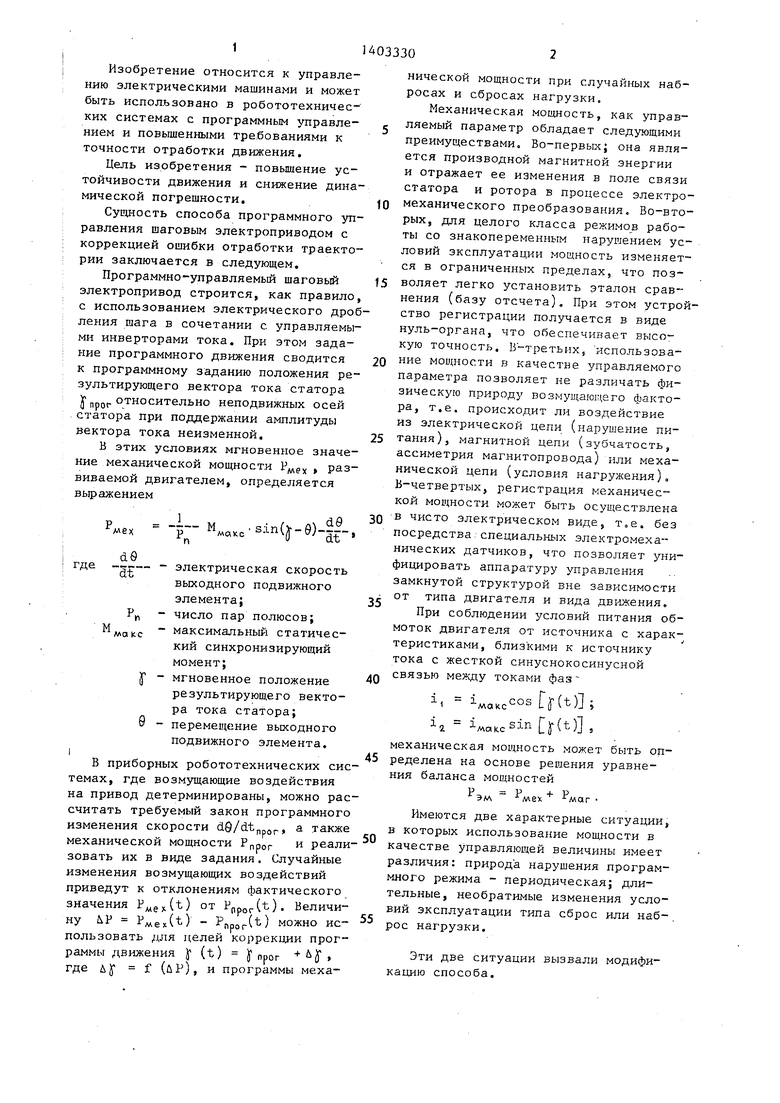
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| СПОСОБ ПРОГРАММНОГО ПОЗИЦИОННОГО УПРАВЛЕНИЯ МНОГОФАЗНЫМ ШАГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ЭЛЕКТРИЧЕСКИМ ДРОБЛЕНИЕМ ШАГА | 1990 |
|
RU2020725C1 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1098099A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ M-ФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ | 1991 |
|
RU2010294C1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Устройство для программного управления шаговым двигателем | 1981 |
|
SU957172A1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| Устройство для программного управления @ -фазным шаговым двигателем | 1987 |
|
SU1529179A1 |
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |

Изобретение относится к области электротехники и может быть использовано вробототехнических установках с программным управлением, включающих электропривод с синхронным, в частности с шаговыми двигателями. Цель изобретения - повышение устойчивости движения и снижение динамической погрешности. Способ программного управления приводом, содержащим шаговый электродвигатель, подключенный к управляемо у инвертору тока, включает подачу на вход привода управляющего воздействия, электрическое дробление шага, сравнение заданного упг равляемого параметра с его текущим значением и изменение тока инвертора в соответствии с результатом сравнения. Б качестве управляемого параметра используют электромагнитную мощность, измеряют напряжение и токи на разных обмотках двигателя, вычисляют мгновенное значение электромагнитной мощности, сравнивают ее с программно- заданным значением, их разность преобразуют в сигнал коррекции, который добавляют к программно-заданному управляющему воздействию. Для преобразования разностного сигнала в сигнал коррекции интегрируют разностный сигнал и суммируют его с результатом интегрирования. Способ программного управления приводом позволяет повысить устойчивость движения, снизить динамическую погрешность, отказаться от датчиков обратной связи по положению подвижного элемента и унифицировать структуру привода независимо от конструкции двигателя. 3 з.п. ф-лы. 4 ил. с $5 4 СО со со
РПР 97
Фиг.1
I
Фиг4
| Ивобоженко Б.А,, Козаченко -В.Ф., Шаговый привод в робототехнике | |||
| М.: иэд-во МЭИ, 1984, с.64-95 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Bechtle Б | |||
| et al | |||
| Delaced closed loop scheme for stepping motor - control | |||
| IBM j Res and Development, 1976, 20, N 3, 235-243. | |||
