Изобретение относится к электротехнике и может быть использовано в электроприводах с программным управлением для систем точного воспроизведения движений в роботах и станках с числовым программным управлением с синхронными, в частности шаговыми электродвигателями при высоких требованиях к быстродействию, точности позиционирования и качеству отработки заданной траектории движения.
Известны способы позиционного программного управления шаговым электродвигателем с инвертором напряжения, распределителем импульсов и блоком электрического дробления шага, формирующим двухканальную последовательность сигналов одинаковой частоты с регулируемым фазовым сдвигом между ними, поступающих на вход распределителя импульсов, обеспечивающие позиционирование с частотами, меньшими частоты приемистости шагового двигателя [1]. Известны также способы позиционного программного управления шаговым электродвигателем, аналогичные предыдущему, но с блоком программного разгона-торможения, обеспечивающие позиционирование с частотами выше частоты приемистости [1].
Наиболее близким по технической сущности к предлагаемому способу позиционного программного управления является способ, основанный на применении инвертора тока и блока электрического дробления шага с цифроаналоговым преобразователем, обеспечивающий формирование в фазных обмотках шагового двигателя токов одинаковой амплитуды и переменной частоты, пропорциональной заданной программной скорости движения [2].
Недостатки известного технического решения состоят в отсутствии системы управления динамическим моментом двигателя и как следствие в возникновении значительных ошибок воспроизведения заданной траектории движения; необходимости снижения среднего момента двигателя на этапах разгона-торможения с целью обеспечения достаточной устойчивости и надежности привода и, как следствие, к недоиспользованию двигателя по моменту, а также к снижению быстродействия привода; наличии статических ошибок позиционирования при действии активного момента нагрузки.
Целью изобретения является улучшение статических и динамических свойств позиционных шаговых электроприводов, повышение быстродействия и надежности привода.
Это достигается тем, что при известном способе позиционного программного управления многофазным шаговым электродвигателем с электрическим дроблением шага, при котором в обмотках шагового двигателя формируют токи переменной частоты и одинаковой амплитуды, с увеличением частоты токов на этапе разгона двигателя в соответствии с оптимальной по быстродействию тахограммой разгона, стабилизацией частоты токов на этапе движения с установившейся скоростью, уменьшением частоты токов на этапе торможения в соответствии с оптимальной по быстродействию тахограммой торможения и фиксацией токов фаз в конце торможения, дополнительно в строго определенные дискретные моменты времени изменяют фазу одновременно всех токов в обмотках двигателя, при этом в начале разгона увеличивают фазу токов на угол arcsin[(JΣεmax + Mc)/Mmax] , при переходе к режиму движения с установившейся скоростью указанный выше фазовый сдвиг токов снимают и увеличивают фазу токов на угол arcsin[( βωmax + Mc)/Mmax], при переходе к режиму торможения указанный выше фазовый сдвиг токов снимают и дополнительно уменьшают фазу токов на угол arcsin[(JΣεmax - Мc)/Mmax], в конце торможения при переходе к режиму фиксации заданного конечного положения указанный выше фазовый сдвиг снимают.
Поставленная цель по улучшению точности позиционирования и уменьшению статической ошибки в условиях действия активного момента нагрузки достигается дополнительным увеличением фазы всех токов двигателя на угол arcsin(Mc) при переходе к режиму фиксации заданного конечного положения, где
JΣ - суммарный момент инерции привода с вращающимся двигателем или суммарная масса подвижной части линейного привода (mΣ );
εmax - максимальное угловое ускорение для принятой тахограммы разгона вращающегося двигателя или максимальное ускорение для линейного двигателя (amax);
Мс - момент статической нагрузки или усилие статической нагрузки (Fс) для вращающихся и линейных двигателей соответственно;
Мmax - максимальный статический синхронизирующий момент и максимальное статическое синхронизирующее усилие (Fmax), для вращающегося и линейного двигателей соответственно;
β - коэффициент эквивалентного вязкого трения, учитывающий наличие в приводе вентиляторного момента нагрузки, потерь на вихревые токи и перемагничивание;
ωmax - максимальная установившаяся скорость позиционирования для вращающегося и линейного двигателей (Vmax) соответственно.
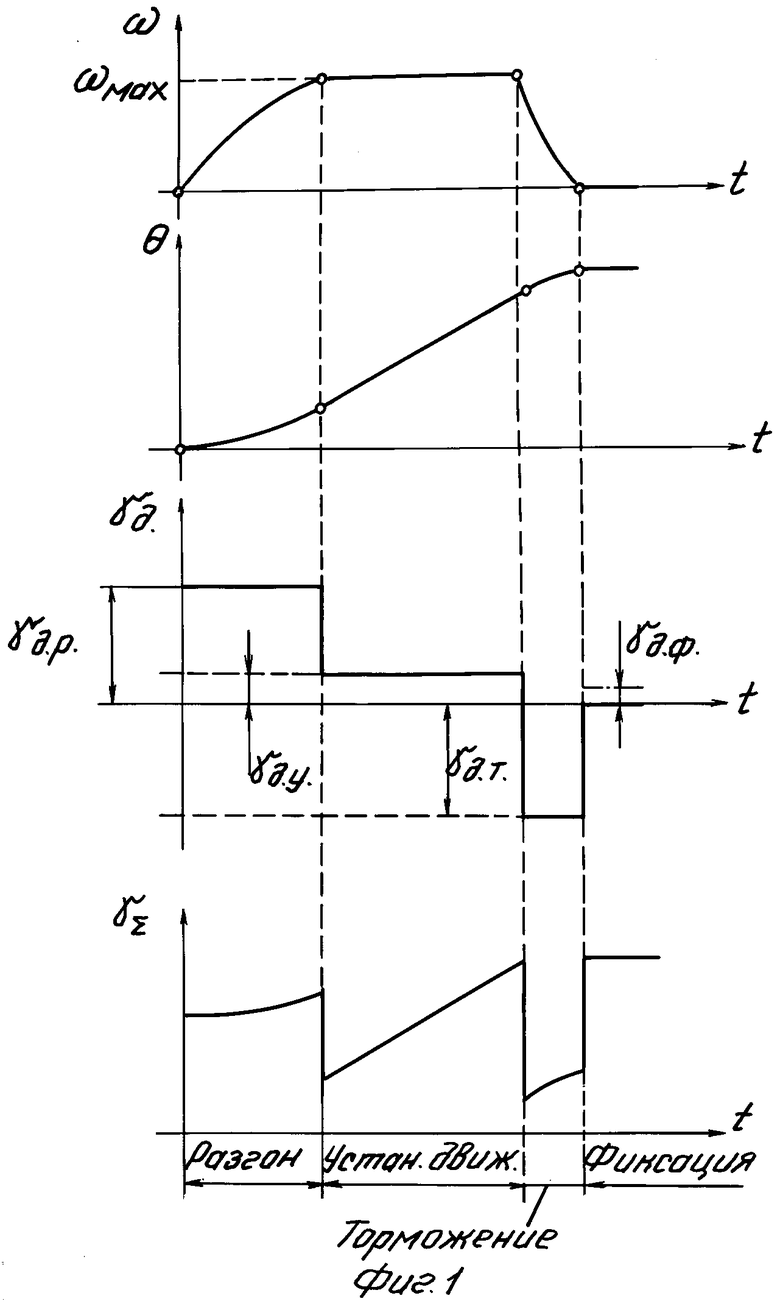
На фиг. 1 изображен цикл позиционирования привода с программируемым разгоном, движением на заданной установив- шейся скорости, программируемым торможением и фиксацией конечного положения, а также уравнением движения привода при питании обмоток шагового двигателя от управляемого инвертора тока и глубоком электрическом делении конструктивного шага машины
JΣ + β
+ β  + Mc= Mmaxsin(γ-θ), где θm,θ - механическое и электрическое положение ротора (θ=θmp);
+ Mc= Mmaxsin(γ-θ), где θm,θ - механическое и электрическое положение ротора (θ=θmp);
p - число пар полюсов машины;
γ - программное значение фазы токов двигателя.
На первых двух графиках показана тахограмма позиционного электропривода, соответствующая предлагаемому способу управления - зависимости изменения механической скорости двигателя ω (t) и электрического положения ротора θ (t) от времени. Точками отмечены моменты времени, когда производятся дискретные изменения фазы токов двигателя. На третьем графике показан закон изменения приращения фазы токов двигателя в функции времени γд(t).
Дискретный сдвиг фазы токов при разгоне γд.р. приводит к дискретному сдвигу электромагнитного поля в воздушном зазоре машины и созданию требуемого значения динамического момента в соответствии с заданным максимальным ускорением привода εmax. Дискретный сдвиг фазы токов при переходе от разгона к установившемуся движению γд.у. обеспечивает создание электромагнитного момента, достаточного для компенсации момента вязкого трения на скорости, равной скорости позиционирования ωmax, а также момента статической нагрузки Мс. Дискретный сдвиг фазы токов при переходе к режиму торможения γд.т. обеспечивает создание тормозного электромагнитного момента в соответствии с заданным замедлением (- εmax). Дискретный сдвиг фазы токов при переходе к режиму фиксации обеспечивает создание электромагнитного момента, достаточного для компенсации активного момента нагрузки Мс в конечной точке траектории движения.
Четвертый график иллюстрирует закон изменения программного значения фазы токов двигателя γΣ(t) = θ (t) + γд(t), определяемого суммой двух составляющих: программного значения электрического положения ротора двигателя и дискретного приращения фазы токов двигателя.
Отличительным признаком данного изобретения является формирование дополнительных фазовых сдвигов токов в соответствии с величиной ускорения и нагрузки на соответствующем интервале траектории позиционирования, что обеспечивает минимизацию динамических ошибок привода и улучшение качества движения; значительное увеличение допустимых темпов разгона-торможения вплоть до значений ускорения, соответствующих моменту двигателя (0,7-0,8) Мmax, по сравнению с значениями ускорения, соответствующими моменту двигателя (0,3-0,4) Мmax для традиционных систем управления; практически оптимальный по быстродействию старт-стопный характер перемещения независимо от величины и требуемой скорости перемещения; минимизацию статических ошибок и повышение точности позиционирования в условиях действия активного момента нагрузки.
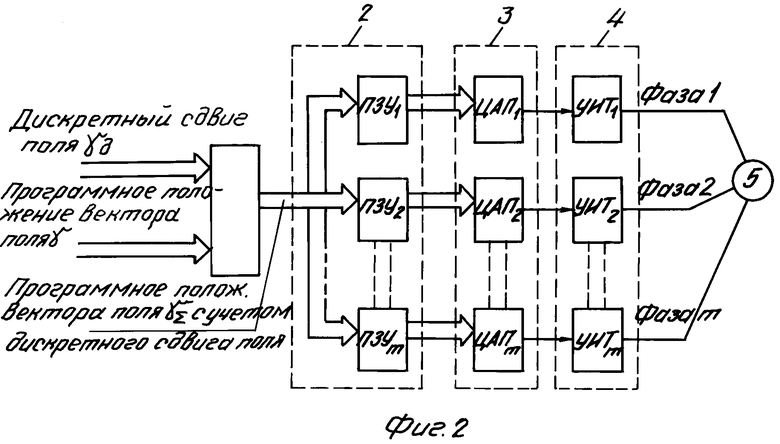
Изобретение осуществляется следующим образом (см. фиг. 2). На входах сумматора 1 производится сложение двух цифровых сигналов: сигнала текущего программного электрического положения ротора γ(t) =θ (t), вырабатываемого устройством планирования траектории движения, и сигнала дискретного сдвига фазы токов γд(t), вырабатываемого генератором дискретных сдвигов поля, работающим совместно с планировщиком траектории движения. Выходной цифровой сигнал сумматора γΣ (t) = γ(t) + + γд(t), определяющий мгновенное значение фазы вектора суммарного тока статора, поступает на адресные входы постоянного запоминающего устройства (ПЗУ) 2, хранящего m-фазную последовательность цифровых кодов токов отдельных фаз m-фазного шагового электродвигателя. Цифроаналоговый преобразователь (ЦАП) 3 обеспечивает преобразование кодов уставок токов фаз в аналоговые сигналы задания токов фаз, поступающие на входы инвертора тока (УТ) 4, а последний формирует заданные уровни токов в обмотках двигателя 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1966 |
|
SU185375A1 |
| МОДУЛЬ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1990 |
|
RU2030081C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 2006 |
|
RU2313173C2 |
| Система регулирования положения | 1990 |
|
SU1795416A1 |
| Способ управления многофазным электродвигателем | 1974 |
|
SU513461A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Способ программного управления приводом | 1986 |
|
SU1403330A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Устройство для управления многофазным электродвигателем | 1973 |
|
SU499641A1 |
| Устройство для управления шаговым электродвигателем | 1978 |
|
SU720660A1 |
Использование: в роботах и станках с числовым программным управлением. Сущность: при способе программного позиционного управления многофазным шаговым электродвигателем с электрическим дроблением шага в строго определенные моменты времени одновременно изменяют фазу всех токов в обмотках шагового электродвигателя, увеличивая в начале разгона фазу токов на определенный угол. В установившемся режиме указанный фазовый сдвиг снимают и увеличивают фазу токов на другую величину, определяемую максимальной скоростью. В режиме торможения фазу токов уменьшают в зависимости от максимального ускорения. Это позволит улучшить динамику электропривода. 1 з.п.ф-лы, 2 ил.
где IΣ - суммарный момент инерции для вращающегося шагового электродвигателя или суммарная масса поданной части для линейного шагового электродвигателя;
εmax - максимальное угловое ускорение тахограммы разгона для вращающегося шагового электродвигателя или максимальное ускорение для тахограммы разгона для линейного шагового электродвигателя;
Mc - момент статической нагрузки или усилие статической нагрузки соответственно для вращающегося и линейного шагового электродвигателей;
Mмах - максимальный статический синхронизирующий момент или максимальное статическое синхронизирующее усилие соответственно для вращающегося и линейного шагового электродвигателей;
β - коэффициент эквивалентного вязкого трения, учитывающий наличие в приводе вентиляторного момента нагрузки, потерь на вихревые токи и перемагничивание;
ωmax - максимальная установившаяся скорость позиционирования для вращающегося или линейного шагового электродвигателей соответственно.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Смирнов Ю.С | |||
| Системы управления сервомеханизмами с шаговыми электродвигателями | |||
| Микропроцессорные средства и системы, N 4, 1985, с.71-77. | |||
