О
-ч|
| название | год | авторы | номер документа |
|---|---|---|---|
| Мальтийский механизм | 1986 |
|
SU1370345A1 |
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| Мальтийский механизм | 1983 |
|
SU1126745A1 |
| Мальтийский механизм | 1985 |
|
SU1305481A1 |
| Мальтийский механизм | 1987 |
|
SU1420287A1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Мальтийский механизм | 1988 |
|
SU1518607A1 |
| МЕХАНИЗМ ПРЕРЫВИСТОГО ДВИЖЕНИЯ | 1972 |
|
SU326393A1 |
| ПРЕРЫВАТЕЛЬ ДВИЖЕНИЯ ПРИВОДА РАПИРЫ ТКАЦКОГО СТАНКА | 2017 |
|
RU2662697C1 |
| Устройство для передачи прерывистого движения | 1988 |
|
SU1631217A1 |

Изобретение относится к общему машиностроению и может быть использовано в устройствах для обеспечения прерывистого вращения ведомого звена с выстоем. Цель изобретения - повышение надежности за счет самоустановки пальца в пазу креста, .; что обеспечивает увеличение площади контакта пальца и паза и снижение ударных нагрузок в механизме. Цевка 6 кривошипа 2 за счет упругих элементов 10,11 самоустанавливается в моменты начала или конца движения мальтийского креста. Это увеличивает площадь контакта пальца и паза и снижает ударные нагрузки в механизме. Выполнение кривошипа 2 с вилкой 4, установленной на оси 5 в теле кривошипа 2 и взаимодействующей с упругими элементами 10,11, кроме того, обеспечивает компенсацию погрешностей изготовле-. ния и сборки механизма. 2 з.п. ф-лы, 3 ил. 
Фиг.2
Изобретение относится к общему машиностроению и может быть использовано в устройствах для обеспечения прерьшистого вращения ведомого звена с выстоем.
Цель изобретения - повышение надежности за счет самоустановки пальца nasy креста, что обеспечивает увеличение площади контакта пальца и паза и снижение ударных нагрузок в механизме.
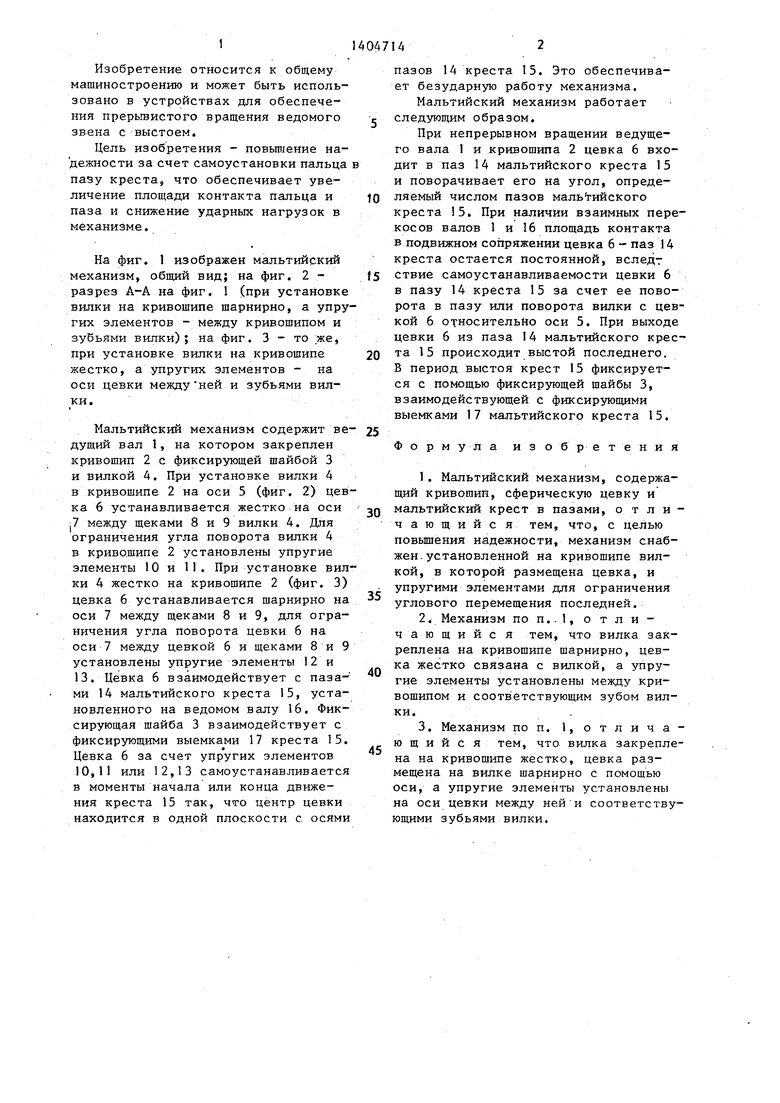
На фиг. 1 изображен мальтийский механизм, общий вид; на фиг. 2 - разрез А-А на фиг, 1 (при устайовке вилки на кривошипе шарнирно, а упругих элементов - между кривошипом и зубьями вилки) I на фиг. 3 - то .же, при установке вилки на кривошипе жестко, а упругих элементов - на оси цевки между ней и зубьями вилки.
Мальтийский механизм содержит ве дущий вал 1, на котором закреплен кривошип 2 с фиксирующей щайбой 3 и вилкой 4. При установке вилки 4 в кривошипе 2 на оси 5 (фиг. 2) цевка 6 устанавливается жестко на оси ;7 между щеками 8 и 9 вилки 4. Для ограничения угла поворота вилки 4 в криво.шипе 2 установлены упругие элементы 10 и 11. При установке вилки 4 жестко на кривошипе 2 (фиг. 3) цевка 6 устанавливается щарнирно на оси 7 между щеками 8 и 9, для ограничения угла поворота цевки б на оси 7 между цевкой 6 и щеками 8 и 9 установлены упругие элементы 12 и 13. Цевка 6 взаимодействует с пазами 14 мальтийского креста 15, установленного на ведомом валу 16. Фиксирующая шайба 3 взаимодействует с фиксирующими выемками 17 креста 15.
Цевка 6 за счет упругих элементов 10,11 или 12,13 самоустанавливается в моменты начала или конца движения креста 15 так, что центр цевки находится в одной плоскости с осями
5
5
пазов 14 креста 15. Это обеспечивает безударную работу механизма.
Мальтийский механизм работает следующим образом.
При непрерывном вращении ведущего вала 1 и кривошипа 2 цевка 6 входит в паз 14 мальтийского креста 15 и поворачивает его на угол, определяемый числом пазов маль гийского креста 15. При наличии взаимных перекосов валов 1 и 16 площадь контакта в подвижном сопряжении цевка 6 - паз 14 креста остается постоянной, вследт ствие самоустанавливаемости цевки 6 в пазу 14 креста 15 за счет ее поворота в пазу или поворота вилки с цевкой 6 относительно оси 5. При выходе цевки 6 из паза 14 мальтийского креста 15 происходит выстой последнего. В период выстоя крест 15 фиксируется с помощью фиксирующей шайбы 3, взаимодействующей с фиксирующими выемками 17 мальтийского креста 15.
Фо рмул а и 3 о бре те н и я
7
Фс/э.
| Пространственный мальтийский механизм | 1981 |
|
SU1010361A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Мальтийский механизм | 1984 |
|
SU1221420A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
