П
Изобретение относится к млшино- строе}шю и может быть использовано для получения прерьгоистого движения, например, в многопоэиютонных техноло гических автоматах и автомятических манипуляторах.
Цель итобретеущя - повьшгение надежности путем уменьшения ударных на гручок за счет обеспечения беззаэор- ноге зацепочения и компрнса1.р1и износа в сопряжении цевка - паз мальтийского креста,
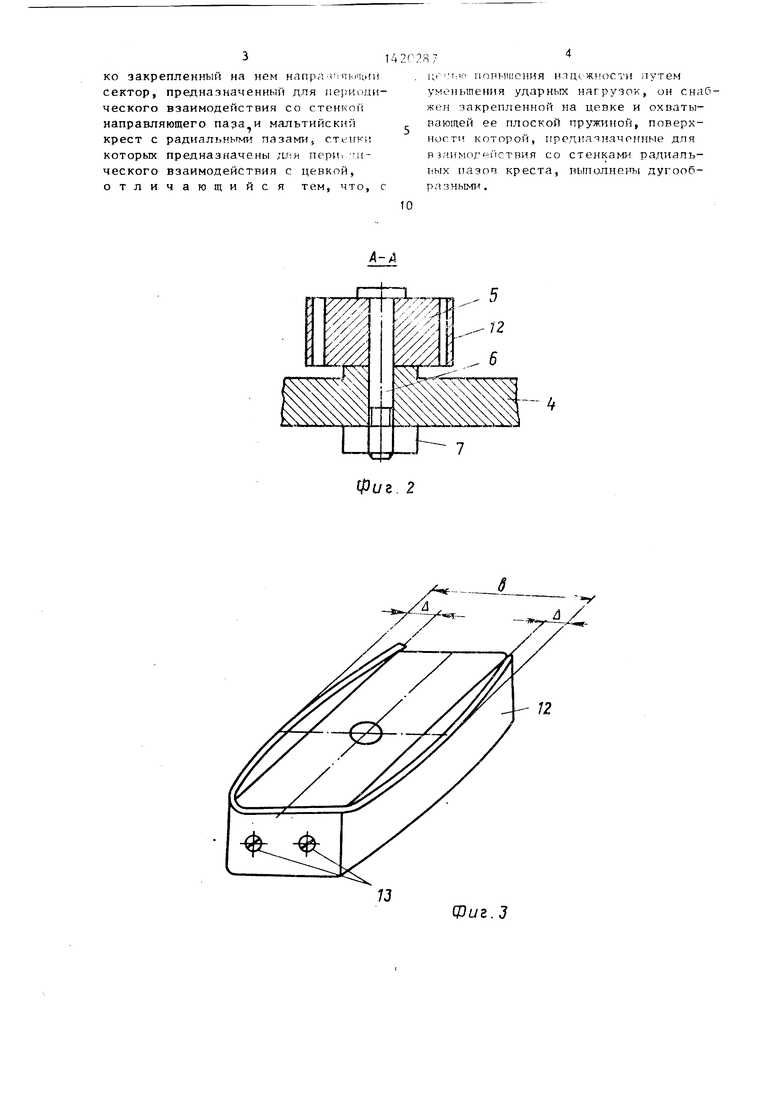
На фиг.1 изображен мальтийский механизм, вид; на фиг. 2 - раз- рез А-А на фиг,1; на фиг.3 - цевка вне зацепления с ггазом маль нйского креста.
Мальтийский механизм состоит из корпуса 1, в котором установлены ве- ДУ1ЦИЙ 2 и ведомый 3 валы. На ведущем валу 2 жестко закреплены кривошип
4с девкой 5, которая шарнирно установлена ка оси 6,закрепленной на криводшпе 4 с помощью гайки 7, и фик сатор 8, вьтолненный в виде диска с вырезом, соосного ведущему валу 2. Мальтийский крест 9 жестко закреплен
на ведомом валу 3 и имеет рал,иальные пазы 10. 75лн пранилъ- оч ориентации цевки 5 в (омент нхода i паз 10 мальтийского креста 9 и избежания жест- к-их ударов в корпусов 1 вьптолнен на- правляю1Ш1Й паз 1 1 , длина дуги окруж- нос1 И которого определяется углом
noBoptrra криво1иипа 4 с цевкой 5, со- отвеч ствуюиэ м выстою мальтийского креста 9. юковые образующие цевки
5выполнены в виде плоской пружины
12, прикрепленной i-; торцовой поверх- ности цевки с помощью винтов 13. Вне зацепления участки пдоской пружины 12, образующие боковые рабочие грани цевки 5, выгнуты в сторону поверхностей ,пазов 10 мальтийского креста 9, причем щирина цевки в осевом поперечном сечении больше ширины паза 10 креста 9 на удвоенную величину упругой деформации Д пружины 12. Во избежание заклинивания механизма необходимо, чтобы в предельном состоянии в период взаимодействия цевки 5 с пазом 10 креста 9 ширина цевки 5 вместе с деформированными рабочими участками пружины 12 не превос
ходила ширину паза 10 креста 9.
Мальтийский механиз работает следующим образом.
,
Ю
15
20
25
30 -зс
Q с
0
5
При вращении ведущего вала 2 кри- вощип 4 посредством цевки 5 взаимодействует с радиальными пазами 10 мальтийского креста 9, поворачивая последний на угол, определяемый числом пазов 10. Внутри интервала дви- креста 9 при взаимодействии цевки 5 со стенками пазов 10 происходит некоторый прогиб пр гжины 12 в пределах упругих деформаций, так что контакт, в сопряжении цевка 5 - паз 10 мальтийского креста 9 становится близким к плоскостному контакту.При этом сила упругости рабочих участков пружины 12 прижимает последнюю к стенкам пазов 10 креста 9, обеспечивая тем caNfhiM беззазорность зацепления и повьшшние плавности поворо-. та мальтийского креста 9, Цевка 5 в это время совершает сложное движение: поступательное вдоль, паза 10 и вращательное относительно оси 6 крепления. При выходе цевки 5 из паза 10 происходит выстой креста 9, во время которого последний фиксируется с помощью фиксатора 8, а цевка 5 скользит по направляющему пазу 1 1 и при движении ориентируется таким образом, чтобы войти в паз 10 по касательной к окружности, описываемой центром вращения цевки 5, обеспечивая тем самым безударную работу механизма. При дальнейшем вращении ведущего кривошипа 4 с цевкой 5 работы мальтийского механизма повторяется.
В процессе работы мальтийского механизма происходит постепенный износ рабочих поверхностей np TicHHbi.12 и пазов 10 мальтийского креста 9,Выборка зазоров в сопряжении цевка 5 - паз 10 мальтийского креста 9 осуществляется за счет упругости пружины 12,рабочие участки которой при износе стенок пазов 10 креста 9 переместятся в сторону увеличения радиуса образутоп1их цевки 5, сохраняя при этом беззазорность зацепления.
Формула изобретения
Мальтийский механизм, содержащий корпус с направляющим пазом, установленные в нем ведущий и ведомый валы, фиксатор в виде соосного ведущему валу диска с дугообразным вырезом, связанный с фиксатором кривошип с пальцем, связанную с пальцем цевку, жест31420287
пленный на нем напрл ч тьищ-ш. ц
предназначенный для периодивзаимодействия со стенкой
цг ум же ва но в з lib ра
направляющего пазами мальтийский крест с радиальньгми лазами, стенки которых предназначены Д1:и nepHiти- ческого взаимодействия с цевкой, отличающийся тем, что,
ц
цг . мо пш мюсния Н:ТД(жнс:сти путем уменьшения ударных нагрузок, он снабжен закрепленной на цевке и охватывающей ее плоской пружиной, поверхности которой, преднаяначрнные для в з; .имогеГ1Ствия со стенками радиаль- libix пазов креста, выполнены дугообразными .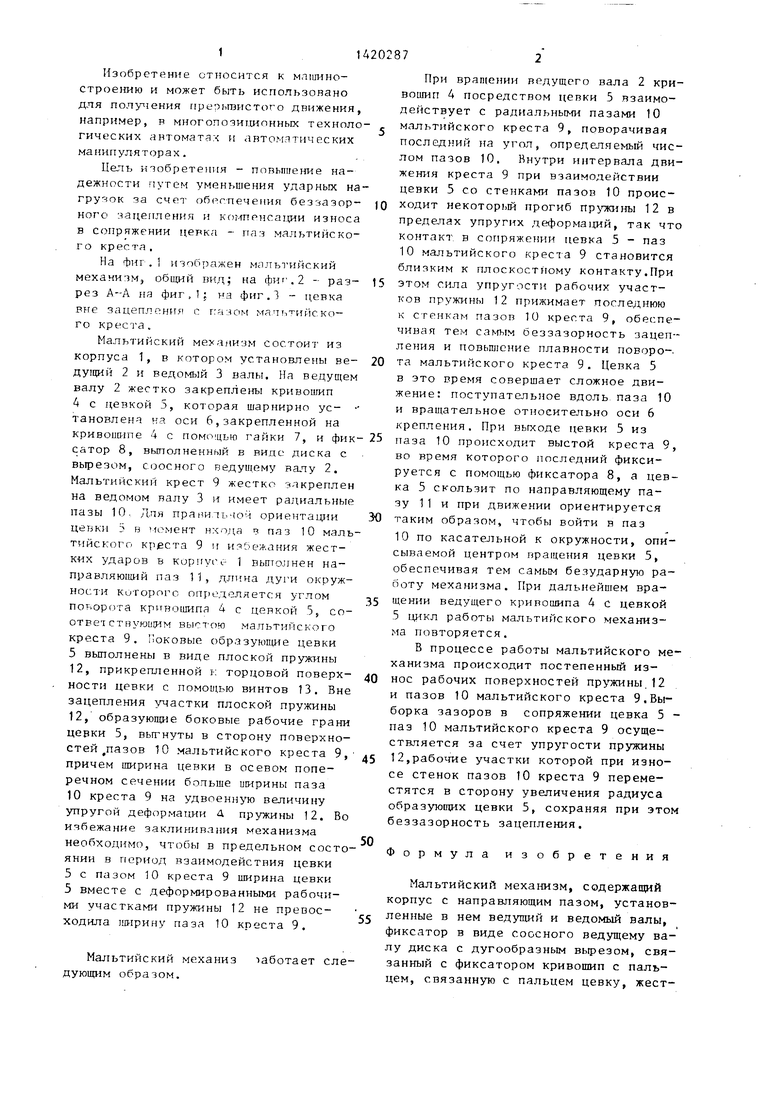
| название | год | авторы | номер документа |
|---|---|---|---|
| Мальтийский механизм | 1986 |
|
SU1404714A1 |
| Мальтийский механизм | 1989 |
|
SU1732087A1 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1990 |
|
RU2035268C1 |
| Мальтийский механизм | 1985 |
|
SU1305481A1 |
| Устройство для осуществления прерывистого вращения | 1975 |
|
SU564477A2 |
| Устройство смены рисунка по утку к бесчелночному ткацкому станку | 1983 |
|
SU1170015A1 |
| Устройство для преобразования вращательного движения в колебательное | 1987 |
|
SU1483139A1 |
| Устройство для осуществления прерывистого вращения | 1980 |
|
SU956870A1 |
| Устройство для укладки в пакет металлических чушек | 1982 |
|
SU1066922A1 |
| Мальтийский механизм | 1985 |
|
SU1298462A1 |
Изобретение относится к машиностроению и может быть испольаовано для получения прерывистого движения, например, в многопозиционных тех}юло- гических автоматах и автоматических манипуляторах. Цель изобретения - повышение надежности путем уменьшения ударных нагрузок за счет обеспечения беззазорного зацепления и компенсаlijiH износа п сопряжении церка-паз мальтийского креста. При врашении криг:о1шпл 4 цсрка 5 )ходит в плз 10 мальтийского креста 9. При этом яа счет упругс сти участков пружины 12 последняя прижимается к стенкам пазов 10 креста 9. обеспечивая тем самым беззазорность в зацеплении. В процессе работы происходит постепенный износ рабочих поверхностей пружины 12 и пазов 10 креста 9. Br.i- борка зазорои в сопг яжешш цевкс- 5 - паз 10 креста осущесгвляится также за счет упругости пр г-жины 12, рабочие У4астки которой при износе стенок пазок 10 креста переместятся в сторо- - ну. увеличения paiuiyc;- образующей цевки 5, сох1;аняя при f сззазорность зацепления. 3 ил. 3 9 а С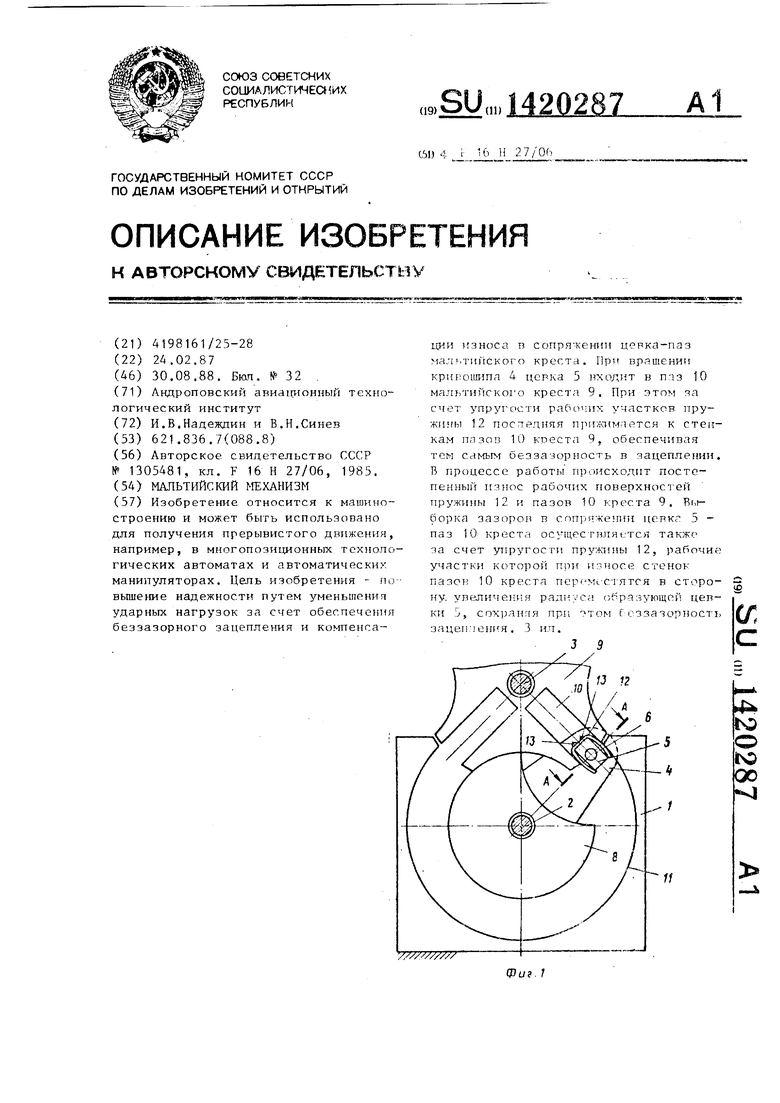
Фиг. 2
| Мальтийский механизм | 1985 |
|
SU1305481A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
