/V,/
Ж
h
со о со
Изобретение относится к дноуглубительным работам и может быть использовано в системе комплексной автоматизации многочерпаковых земснарядов.
Цель изобретения - повьшение качества регулирования момента на валу привода черпаковой цепи путем исключения статической ошибки и максималь- ного снижения динамической ошибки регулирования.
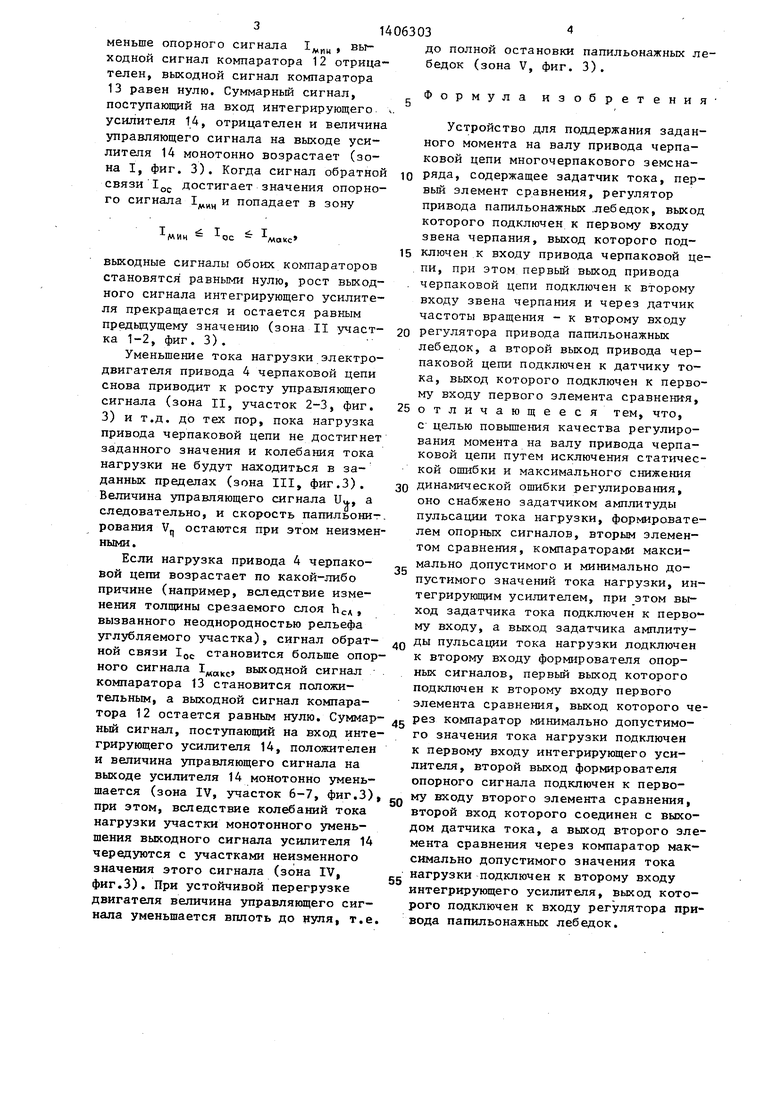
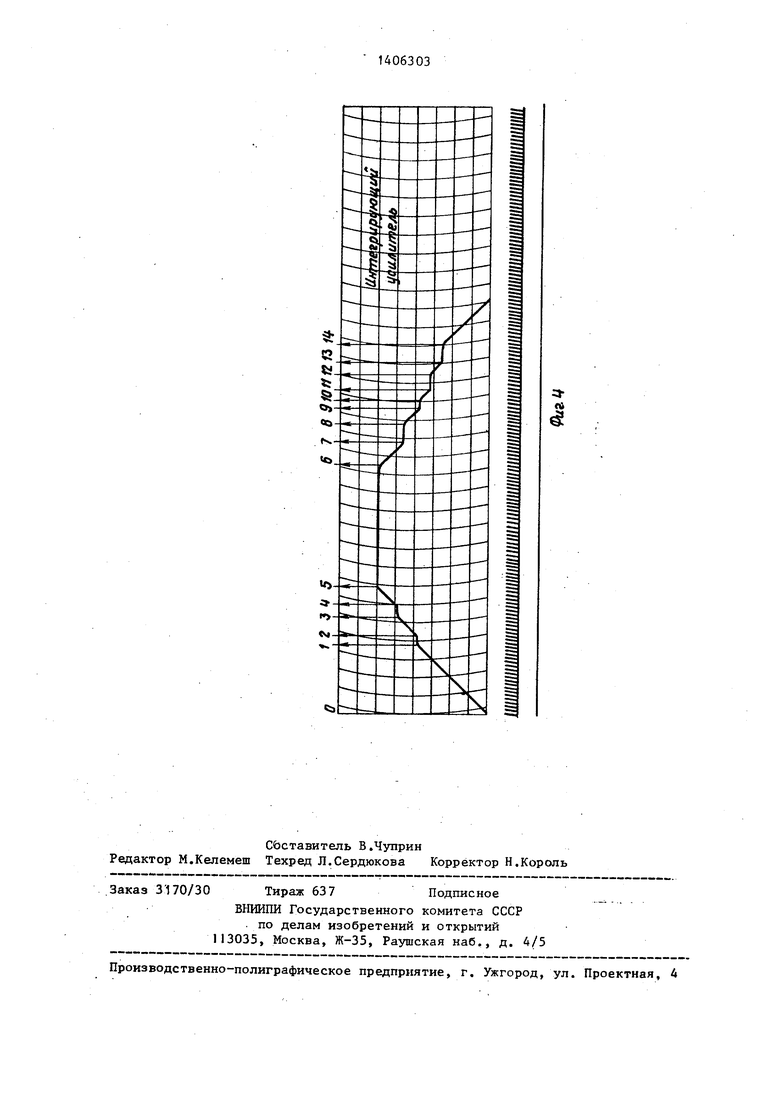
На фиг. 1 изображена функциональ- нал схема устройства; на фиг. 2 - принципиальная схема узла формирова- кия управляющего сигнала; на фиг. 3 - временные диаграммы изменения тока нагрузки электродвигателя привода черпаковой цепи; на фиг. 4 - изменение .управляющего сигнала на выходе усилителя 14.
Устройство содержит узел 1 формирования управляющего сигнала, регу- лятор 2 привода папильонажной лебедки, звено 3 черпания, привод 4 чер- паковой цепи, датчик 5 тока якоря двигателя и датчик 6 частоты вращения, при этом узел 1 содержит задатчик 7 тока .якоря, задатчик 8 амплитуды пульсаций тока якоря, формирователь 9 опорных сигналов, первый 10 и второй 11 элементы сравнения, компаратор 12 минимально допустимого значения тока нагрузки, компаратор 13 максимально допустимого значения тока на грузки, интегрирующий усилитель 14.
Выходы задатчика 7 тока якоря и задатчика 8 амплитуды пульсаций тока якоря двигателя черпаковой цепи подключены к входам формирователя 9 опорных сигналов. Первый выход формирователя 9 подключен к второму входу первого элемента сравнения 10, пер- вьй вход которого подключен к выходу датчика 5 тока, а выход элемента 10 сравнения через компаратор 12 поди:лю- чен к первому входу интегрирующего усилителя 14. Второй выход формирователя 9 подключен к первому входу второго элемента t1 сравнения, второй вход которого подключен к выходу датчика 5 тока, а выход второго элемента 11 сравнения через компаратор 13 подключен к второму входу интегрирующего усилителя 14, выход которого является вЕОХодом узла 1.
Выход узла 1 подключен к однокпг из входов регулятора 2 привода пахгаль онажной лебедки, соединенной через
звено .3 черпания с управляемым входом привода 4 черпаковой цепи. Второй выход привода 4 черпаковой цепи подключен к входу датчика 5 тока якоря,а первый подключен к второму входу звена 3 черпания и через датчик 6 частоты вращения к второму входу регулятора 2. Выход датчика 5 тока якоря подключен к первому входу элемента 10 сравнения и второму входу элемента 11 сравнения.
Устройство работает следующим образом.
После установки многочерпакового земснаряда на участке дноуглубительных работ оператором задаются основные параметры технологического процесса: подача вдоль переднего станового троса 1, угол папильонирова-7 ния бб , среднее значение толщины срезаемого слоя и скорость черпания Vp. При неизменном коэффициенте сопротивления черпания О (категория грунта) и постоянных значениях Параметров 1, о( , h и V,, нагрузка F на привод 4 черпаковой цепи, формируемая звеном 3 черпания полностью оп- ределяется величиной скорости папиль- онирования V|, , которая в свою очередь определяется величиной управляющего сигнала Uu, поступающего с узла 1 формирования. Ток якоря и вра- щаюирй момент двигателя привода 4 черпаковой цепи определяется нагрузкой F и зависит от степени наполнения черпаков грунтом. Исходя из кон- кретньк грунтовых условий оператор устанавливает заданное значение тока якоря I задатчиком 7 и заданное значение амплитуды пульсаций и I задатчиком 8, при этом с выхода формирователя 9 опорных сигналов на входы элементов 10 и 11 сравнения поступают уставки допустимых значений тока якоря: максимального ( и минимального (1лц,ц ) Компараторы 12, 13 выполнены таким образом (фиг.2), что реализуют следующие функции:
если I,
мин )
если I
Ос
+, если I,
и,, 1
О, если lo, ё .
До тех пор, пока сигнал обратной связи по току нагрузки I „. остается
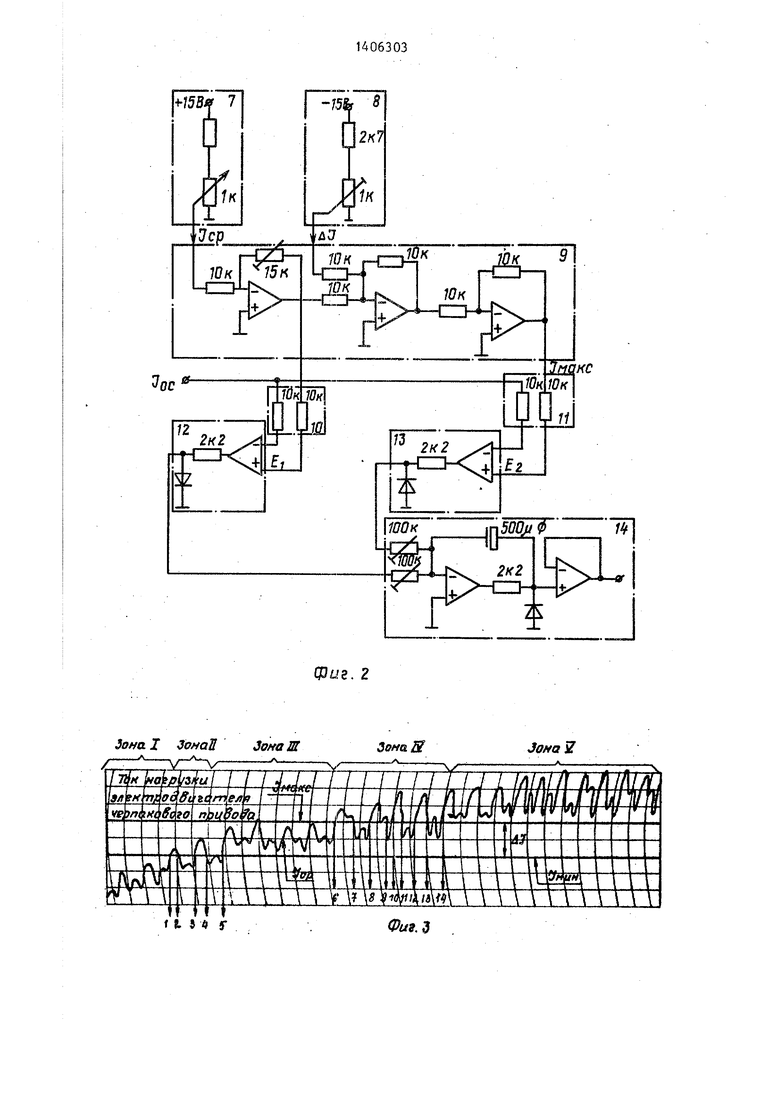
меньше опорного сигнала 1л,ин выходной сигнал компаратора 12 отрицателен, выходной сигнал компаратора 13 равен нулю. Суммарный сигнал, поступающий на вход интегрирующего усилителя 14, отрицателен и величина управляющего сигнала на выходе усилителя 14 монотонно возрастает (зона I, фиг. 3). Когда сигнал обратной связи IQP достигает значения опорного сигнала , и попадает в зону
мин
и In. I.
выходные сигналы обоих компараторов становятся равными нулю, рост выходного сигнала интегрирующего усилителя прекращается и остается равным предьщущему значению (зона II участка 1-2, фиг. 3) .
Уменьшение тока нагрузки электродвигателя привода 4 черпаковой цепи снова приводит к росту управпяющего сигнала (зона II, участок 2-3, фиг. 3) и т.д. до тех пор, пока нагрузка привода черпаковой цепи не достигнет заданного значения и колебания тока нагрузки не будут находиться в заданных пределах (зона III, фиг.З). Величина управляющего сигнала Uu,, а следовательно, и скорость папильонирования V остаются при этом неизменными.
Если нагрузка привода 4 черпаковой цепи возрастает по какой-либо причине (например, вследствие изменения толщины срезаемого слоя Ьсл вызванного неоднородностью рельефа углубляемого участка), сигнал обратной связи IQC становится больше опорного сигнала I, выходной сигнал компаратора 13 становится положительным, а выходной сигнал компара-
а й 1406303
до полной остановки бедок (зона V, фиг.
0
Формула изобретенияУстройство для поддержания заданного момента на валу привода черпаковой цепи многочерпакового земснаряда, содержащее задатчик тока, первый элемент сравнения, регулятор привода папильонажных .лебедок, выход которого подключен к первому входу звена черпания, выход которого под5 ключен к входу привода черпаковой цепи, при этом первый выход привода . черпаковой цепи подключен к второму входу звена черпания и через датчик частоты вращения - к второму входу
0 регулятора привода папильонажных
лебедок, а второй выход привода черпаковой цепи подключен к датчику тока, выход которого подключен к первому входу первого элемента сравнения,
5 отличающееся тем, что, с целью повышения качества регулирования момента на валу привода черпаковой цепи путем исключения статической ошибки и максимального снижения
0 динаьической ошибки регулирования, оно снабжено задатчиком амплитуды пульсации тока нагрузки, формирователем опорных сигналов, вторым элементом сравнения, компараторами максимально допустимого и минимально допустимого значений тока нагрузки, интегрирующим усилителем, при этом выход задатчика тока подключен к первому входу, а выход задатчика амплитуды пульсации тока нагрузки лодключен к второму входу формирователя опорных сигналов, первый выход которого подключен к второму входу первого элемента сравнения, выход которого че5
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования привода черпаковой цепи многочерпакового земснаряда | 1983 |
|
SU1150312A1 |
| Устройство для автоматического регулирования нагрузки черпаковой цепи драги | 1977 |
|
SU682604A1 |
| Устройство регулирования производительности драги | 1986 |
|
SU1372018A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
| Устройство контроля категории крепости грунта при драгировании | 1983 |
|
SU1106900A1 |
| Устройство управления добычным комплексом драги | 1981 |
|
SU994627A2 |
| Устройство управления добычным комплексом драги | 1982 |
|
SU1114745A1 |
| Электропривод постоянного тока | 1986 |
|
SU1339855A1 |
| Устройство управления добычным комплексом драги | 1979 |
|
SU876862A1 |
Изобретение относится к .дноуглубительным работам и м.б. использовано в системе комплексной автоматизации многочерпаковьк земснарядов. Цель изобретения - повьшение качества регулирования момента на валу привода черпаковой цепи (ПЧЦ) 4 путем исключения статической ошибки и максимального снижения динамической ошибки регулирования. Для этого в устройство . введены задатчик 8 амплитуды пульсации .тока нагрузки, формирователь опорных сигналов (ФОС) 9, второй элемент сравнения (ЭС) 11, компараторы максимально 13 и минимально 12 допусти- .мьк значений тока нагрузки ПЧЦ 4 и интегрирующий усилитель 14. К входу ФОС 9 подключены выходы задатчиков тока 7 якоря и амплитуды 8 пульсаций тока. Выходы ФОС 9 подключены через ЭС 10 и 11 соответственно к входам компараторов 12 и 13. Их выходы подключены к входам интегрирующего усилителя 14. Управляющий сигнал с выхода усилителя 14 поступает на вход регулятора 2 привода папйльонажной лебедки. К вторым входам ЭС 10 и 11 подключен связанный с приводом 4 датчик 5 тока якоря, а к второму входу регулятора - датчик 6 частоты вращения. Заданные значения тока якоря и амплитуды пульсаций устанавливает оператор задатчиками 7 и 8 исходя из конкретных грунтовых условий. С выхода ФОС 9 на входы ЭС 10 и 11 поступают уставки допустимых макс, и мин. значений тока якоря. Нагрузка на ПЧЦ определяется величиной скорости папильонирования, которая определяется величиной управляющего .сигнала с выхода усилителя 14. 4 ил. S сл
50
тора 12 остается равным нулю. Суммар- g рез компаратор минимально допустимо- ный сигнал, поступающий на вход инте- го значения тока нагрузки подключен грирующего усилителя 14, положителен и величина управляющего сигнала на выходе усилителя 14 монотонно уменьшается (зона IV, участок 6-7, фиг.З), при этом, вследствие колебаний тока нагрузки участки монотонного уменьшения выходного сигнала усилителя 14 чередуются с участками неизменного значения этого сигнала (зона IV, фиг.З). При устойчивой перегрузке двигателя величина управляющего сигнала уменьшается вплоть до нуля, т.е.
55
к первому входу интегрирующего усилителя, второй выход формирователя опорного сигнала подключен к первому входу второго элемента сравнения, второй вход которого соединен с выходом датчика тока, а выход второго эле мента сравнения через компаратор максимально допустимого значения тока нагрузки подключен к второму входу интегрирующего усилителя, выход которого подключен к входу регулятора при вода папильонажных лебедок.
50
g рез компаратор минимально допустимо- го значения тока нагрузки подключен
55
к первому входу интегрирующего усилителя, второй выход формирователя опорного сигнала подключен к первому входу второго элемента сравнения, второй вход которого соединен с выходом датчика тока, а выход второго элемента сравнения через компаратор максимально допустимого значения тока нагрузки подключен к второму входу интегрирующего усилителя, выход которого подключен к входу регулятора привода папильонажных лебедок.
фае. 2
Зона ЗонаЛ ЗонаШ
f t « 4 Г
30H&S
JONQ
Фи9.Ъ
С
и.
:
о
оа
0
- 1 СЧ|f
SJ- «i
| Устройство для регулирования привода черпаковой цепи многочерпакового земснаряда | 1983 |
|
SU1150312A1 |
| Устройство для автоматического регулирования нагрузки черпаковой цепи драги | 1977 |
|
SU682604A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
