о ел
О) 4
Изобретение относится к автоматическому регулированию и управлению и может быть использовано для регулирования технологических процессов с несколькими peгyлиpye ФIми параметрами,
Цель изобретения - повьшение точности регулирования.
На фиг. 1 представлена блок-схема системы} на фиг, 2 - схема переключателя.
В схему многоканальной автоматической системы регулирования (фиг„1) входят п алгебраических сумматоров 1 п объектов 2 регулирования, вьщели- тель 3 м 1ксимального сигнала, п ограничителей 4, вьщелитель 5 макси - мальной производной, релейный регулирующий блок 6, п первых переключате- лей 75 п исполнительных механизмов 8 п регулирующих органов 9 п источников 10 напряжения, шнротно-импульс- ньш модулятор 11, п вторых переключателей 12.
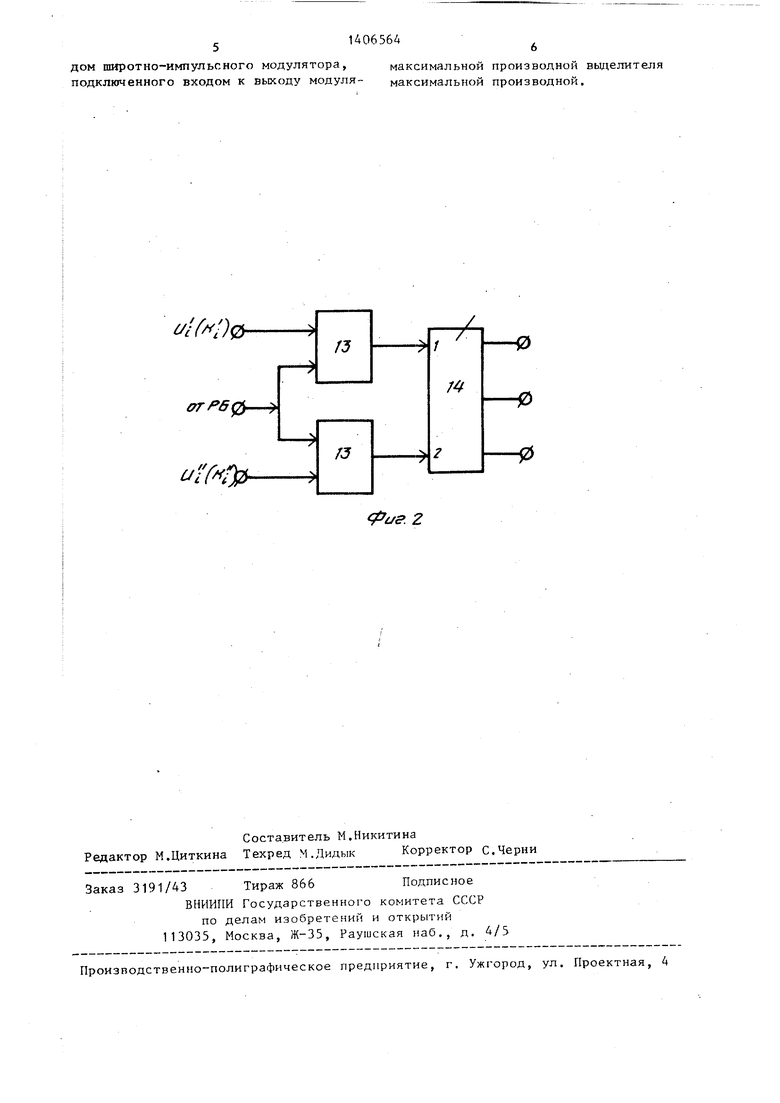
В схему переключателя (фиг. 2) вхо зходят элементы И 13 и усилитель 14,
Схема работает следующим образом.
Сигналы рассогласования ДХ, образующиеся на алгебраических суммато- pax 1 в результате суммирования выходных сигналов объектов 2 регулирования с сигналами задания , поступают на-входы вьщелителя 3 максимального сигнала и одновременно через ограничители 4 на входы вьщелителя 5 максимальной производной. Ограничители 4 пропускают на свой выход только те сигналы, которые превосходят по своей абсолютной величине некоторый установленный порог ограничения ЛХ р Вьщелитель 5 максимальной производной на своем первом выходе вьщает ;управляющий сигнал, равный модулю максимальной производной dX лл,йкс от его входных сигналов. На остальных (командных) вькодах вьщелителя 5 вырабатываются п пар управляющих сигналов (К, к; , К, К;, К з, ,...). Эти сигналы могут принимать значения О либо 1, Ищ1;екс 1.. .п -управляющего сигнала, .равного 1, означает номер канала, в котором, производная максимальна., а число штрихов у К определяет знак производной. Например, если Kj 1, то максимальная производная будет во втором канале, а ее знак положителен. При этом все остальные командные сигналы б-удут равны
д
5 0 5
О Q „ 5
5
О. Если Kj 1, а остальные управ- сигналы равны О, то максимальная производная в третьем канале, а ее знак отрицателен.
На первом выходе вьщелителя 3 выделяется максимальное по модулю от- клонеьше которое пост-упает на вход релейного регулирующего блока 6. На остальных выходах вырабатываются п пар управляющих сигналов И, и И% И. и И, H j и И. Эти сигналы аналогичны управляющим сигналам вТзщелителя 5 и могут принимать значения 1 и О. Индекс 1 п управляющего сигнала показьтает номер канала, в котором отклонение X входного сигнала максимально, а число штрихов у сигнала, равного 1, определяет знак максимального отклонения. Это позволяет включать исполнительный механизм в требуемом направлении, и таким образом учитывать полярность отклонения регулируемого параметра на входе вьщелителя 3.
Выходной сигнал решейного регули- .рующего блока 6 через первые переключатели 7 управляет исполнительными (Механизмами 8, которые через регули- р-ующие органы 9 воздействуют на объекты 2 регулирования. Переключатели 7 и 12 трехпозиционные. Они могут осуществлять реверс исполнительного механизма. Для этого они имеют три выходные клеммы, соединенные с тремя входными клеммами исполнительного механизма (точнее, его усилители мощности). При подаче сигнала с выхода переключателя 7 и 12 на одну пару клемм ИМ (среднюю и одну крайнюю) механизм вращается в одном направлении, а при подаче сигнала на другую пару клемм - в противоположном направлении. При срабатывании первьгй переключатель 7 пропускает йа свои выходные клеммы сигнал с выхода регулирующего блока 6. Это происходит при наличии на втором или третьем входе переключателя 7 сигнала, равного 1.
При работе в обычном режиме, когда одно из отклонений / X максимально, но меньше dXorp вьщелитель 3 максимального сигнала вьщеляет максимальное по модулю отклонение,, которое пост-упает на вход релейного регулирующего блока 6, а с его вькода - на входы переключателей 7. Одновременно на одном из командных выходов
выделителя сигнал
Ч
3 появляется управляющий , которьм поступает на второй или третий вход соответствующего переключателя 7, срабатывание которого вызывает поворот исполнительного механизма в требуемом направлении. Срабатывание переключателя 7 означает замыкание системы по каналу, в котором отклонение максимально. По остальным каналам система остается разомкнутой и регулирования в них не производится.
При работе в тяжелом режиме, когда какие-то два (или более) отклонения jX превышают допустимый порог Хдгр ограничения (что может случиться при действии на объект 2 сильньк внешних возмущений), т.е. приближаются к опасному уровню, эти отклонения проходят через ограничитель 4 и попадают на входы вьщелителя 5 макт симальной производной.
То из этих отклонений, у которого скорость изменения максимальна и которое поэтому первым может достигнут
недопустимого значения ЛХ
ярел
вызыва25 канала, выход каждого из которых подсоединен к первому входу соответствующего исполнительного механизма, подсоединенного выходом через после- - довательно соединенные в каждом канает появление на соответствующем управг:
ляющем выходе выделителя 5 сигнала
1, а на первом его выходе - сигнала 30 регулирующий орган и объект регуЛХ д1 с пропорционального величине, производной от максимального отклонения. Этот сигнал поступает на вход . широтно-импульсного модулятора 11,
35
на выходе которого образуются импульсы, скважность которых пропорциональна величине сигнала лХ Этот импульсный сигнал пройдет через зам- кнувщийся второй переключатель 12, попадает на вход исполнительного механизма 8 и вызовет его перемещение.
Если единичный управляющий сигнал с вьщелителя 5 окажется в том же канале, что и единичный управляющий сигнал с вьщелителя 3, то через от- крытьш первьй переключатель 7 на вход исполнительного механизма пройдет выходной сигнал регулирующего блока 6, а через второй переключатель 12 - сигнал, пропорциональный производной от отклонения в том же канапе. Это означает, что при большой величине производной регулирование будет более интенсивным, т.е. будет иметь место ПД-закон регулирования со всеми его достоинствами.
Если единичные сигналы окажутся в разных канала, то за счет срабатывания первого переключателя 7 в калирования к первому входу алгебраического сумматора соответствующего канала, второй вход каждого из которых является одним из п входов систе мы, а выход подсоединен к соответствующему входу вьщелителя максимального сигнала, п пар управляющих выходов которого соединены с соответ- ,:Ствующими управляющими входами перво
4Q го переключателя каждого канала, выделитель максимальной производной, каждьй из п входов которого связан с каждым из п входов вьщелителя максимального сигнала через соответст с вующие ограничители, вход задания уровня ограничения каждого из которы подключен к выходу соответствующего источника напряжения, о т л и ч а ю- щ а я с я тем, что, с целью повышения точности регулирования, в нее введен широтно-импульсный модулятор, а также в каждый из п каналов введен второй переключатель, выход которого соединен с вторым входом исполнитель ного механизма того же канала, оба управляющих входа соединены с соответствующей парой управляющих выходов вьщелителя максимальной производ ной, а информащюнный вход - с выхо-
50
55
нале с максимальным отклонением выходной сигнал релейного регулирующего блока 6 будет воздействовать на исполнительный механизм этого канала, т.е. будет осуществляться ГТИ-за- кон регулирования. За счет срабатывания второго переключателя 12 в канале с максимальной производной сигнал с выхода ШИМ в виде импульсов со скважностью, пропорциональной производной от отклонения, будет воздействовать на исполнительный механизм.
15
Формула изобретения
Многоканальная автоматическая сие-. тема регулирования, содержащая выделитель максимального сигнала, релейньй регулирующий блок, подключенный входом к выходу модуля максимального сигнала вьщелителя максимального сигнала, а выходом - к информационному входу первого переключателя каждого
канала, выход каждого из которых подсоединен к первому входу соответствующего исполнительного механизма, подсоединенного выходом через после- довательно соединенные в каждом кана5
лирования к первому входу алгебраического сумматора соответствующего канала, второй вход каждого из которых является одним из п входов системы, а выход подсоединен к соответствующему входу вьщелителя максимального сигнала, п пар управляющих выходов которого соединены с соответ- ,:Ствующими управляющими входами первоQ го переключателя каждого канала, выделитель максимальной производной, каждьй из п входов которого связан с каждым из п входов вьщелителя максимального сигнала через соответстс вующие ограничители, вход задания уровня ограничения каждого из которых подключен к выходу соответствующего источника напряжения, о т л и ч а ю- щ а я с я тем, что, с целью повышения точности регулирования, в нее введен широтно-импульсный модулятор, а также в каждый из п каналов введен второй переключатель, выход которого соединен с вторым входом исполнительного механизма того же канала, оба управляющих входа соединены с соответствующей парой управляющих выходов вьщелителя максимальной производной, а информащюнный вход - с выхо-
0
5
51406564
дом широтно-импульсного модулятора,максимальной производной вьщелитепя
подключенного входом к выходу модуля- максимальной производной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная система регулирования | 1982 |
|
SU1083157A1 |
| Многоканальная система регулирования | 1980 |
|
SU881663A1 |
| Двухконтурная многоканальная система регулирования | 1987 |
|
SU1441349A1 |
| Двухконтурная однорегуляторная многоканальная система регулирования | 1989 |
|
SU1658124A1 |
| Устройство для регулирования уровня воды в канале | 1986 |
|
SU1348788A1 |
| Устройство для регулирования уровня воды в канале | 1982 |
|
SU1084758A2 |
| Система регулирования | 1985 |
|
SU1305629A1 |
| Устройство для регулирования уровня воды на участке канала | 1990 |
|
SU1781674A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Многоканальный регулятор | 1985 |
|
SU1290253A1 |
Изобретение относится к технике автоматического регулирования и управления и может быть использовано для регулирования технологических процессов с несколькими изменяемыми параметрами. Цель изобретения - повышение точности регулирования. Система состоит по числу п каналов из п алгебраических сумматоров 1, п объектов 2 регулирования выделителя 3 максимального сигнала, п ограничителей 4, выделителя 5 максимальной производной, релейного регулирующего блока 6, п первых переключателей 7, п исполнительных механизмов 8, п регулирующих органов 9, п источников 10 напряжения, широтно-импульсного модулятора . 11 и п вторых переключателей 12. Введение в систему широтно-импульсного модулятора и п вторых переключателей дает возможность сделать среднюю ско- рость перемещения исполнительных механизмов зависимой от величины максимальной производной от отклонения, чем и достигается цель изобретения. 2 ил. S (Л
сгг. г
| Круг Е.К., Александриди Т.М., Цифровые регуляторы | |||
| М-Л.: Энергия, 1966 | |||
| Авторское свидетельство СССР № 1196805, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
