Изобретение относится к технике автоматического регулирования уровня воды в открытых каналах.
Известно устройство для регулирования уровня воды на канале, содержащее затворы, связанные с исполнительными механизмами, датчики уровня в начале и конце участка канала, радиопередающий блок, радиоприемный блок, первый и второй выходы которого соединены соответственно с первым и четвертым входами широтно-импупьсного модулятора, выход которого связан со входом соответствующего исполнительного механизма, датчик скорости течения воды на участке канала и датчик уровня в начале последующего участка канала, выход которого соединен со вторым входом радиопередающего блока, первый вход которого соединен с выходом датчика уровня D конце участка канала, выход датчика скорости течения воды на участке канала подключен к третьему входу широтно-импульсного модулятора, второй вход которогс связан с выходом датчика уровня в начале участка, обеспечивающее подачу воды через вышерасположенное перегораживающее сооружение в соответствии с запросами водопотребителей посредством поддержания уровня воды в конце и началеучастка канала в заданном значении.
Недостатком указанного устройстиа является низкая точность регулирования, связанная с неточной оценкой величины времени запаздывания на участке канала по выходному сигналу датчика скорости течения воды, установленного в начале участка канала, так как в канале возникают волновые процессы, скорость распространения фронта волны которых указанный датчик не может измерить.
Необходимо отметить, что временное запаздывание 0 (t) на участке канала является функцией от скорости распространения фронта волны c(t) и средней скорости течения воды в канале V(t), т.е.
0(t) f(c(t),V(t)).(1)
В этом устройстве датчик скорости течения воды на участке канала только измеряет среднюю скорость течения воды в канале и поэтому точность оценки временного запаздывания на участке ;;анала является низкой
сл
С
со
CN
XI
i
Наиболее близким техническим решением к предлагаемому изобретению является устройство для регулирования уровня воды на канале, содержащее датчики уровня в начале и конце участка канала, подклю- ченные выходами к первым входам соответствующих блоков сравнения, вторые входы которых соединены с выходами соответствующих задатчиков уровня, радиопередатчик, подключенный входом к выходу первого блока сравнения, радиоприемник, подключенный выходом к первому входу широтно-импульсного модулятора, второй вход которого соединен с выходом второго блока сравнения, а также исполнительный механизм, подключенный входом к выходу широтно-импульсного модулятора, а выходом - к затвору, установленному в начале участка канала, блок оценки времени запаздывания, подключенный входом к выходу радиоприемника и преобразователь напряжения в длительность импульсов, подключенный входом к выходу блока оценки времени запаздывания, а выходом - к третьему входу широтно- импульсного модулятора, причем блок оценки бремени запаздывания содержит последовательно соединенные дифференциатор, выделитель модуля, первый пороговый элемент формирователь импульсов, первый ключ, первый триггер, элемент сравнения, подключенный первым входом к выходу задатчика времени запаздывания и второй ключ, управляющий вход которого соединен со вторым выходом первого триггера, а также второй пороговый элемент, подключенный входом к выходу выпрямителя модуля, а выходом - к управляющему входу интегратора, и второй триггер, подключенный первым входом к выходу второго порогового элемента, вторым входом - ко второму выходу первого триггера, а выходом - к управляющему входу первого ключа, при этом вход дифференциатора является входом блока, а выход второго ключа является выходом блока
Недостатком указанного устройства является низкая точность регулирования, связанная с неточной оценкой времени запаздывания на участке канала по величине изменения сигнала рассогласования в конце участка канала Необходимо отметить, что в каналах точная оценка величины временного запаздывания определяется по формуле:
е«-тгпт 7Т7У (2)
где L - расстояние от датчика уровня воды в конце участка канала (точк измерения) до
гидротехнического сооружения в начале участка канала (точка управления).
Целью изобретения является повышение точности управления уровнем воды в
канале,
С этой целью в устройстве для регулирования уровня воды на участке канала, ограниченном верхним и нижним затворами, содержащем последовательно соединен0 ные датчик уровня воды в начале участка, первый элемент сравнения, блок суммирования, широтно-импульсный регулятор и исполнительный блок, связанный с верхним затвором, последовательно соединенные
5 блок оценки времени запаздывания и преобразователь Напряжения в длительность импульсов, подключенный своим выходом ко входу настройки периода квантования широтно-импульсного регулятора, последо0 вате льно соединенные датчик уровня воды в конце участка и второй элемент сравнения, последовательно соединенные радиопередающий и радиоприемный блоки, а также задатчик уровня воды в начале участ5 ка, подключенный своим выходом ко второму входу первого элемента сравнения, дополнительно первый и второй входы блока оценки времени запаздывания подключены соответственно к выходам
0 радиоприемного блока и датчика уровня воды в начале участка, выход датчика уровня воды в конце участки подключен ко входу радиопередающего блока; выход радиоприемного блока связан со вторым входом вто5 рого элемента сравнения, выход которого подключен ко второму входу блока суммирования.
Кроме того блок оценки времени запаздывания содержит последовательно соеди0 ненные первый сумматор, первый блок деления, первый блок умножения, второй сумматор, второй блок умножения, второй блок деления, третий блок умножения, первый блок извлечения квадратного корня,
5 четвертый блок умножения, третий сумматор, первый нелинейный элемент и третий блок деления, последовательно соединенные первый задатчик коэффициента, пятый блок умножения, четвертый сумматор, вто0 рой нелинейный элемент, четвертый блок деления, второй блок извлечения квадратного корня, связанный своим выходом со вторым входом третьего сумматора, последовательно соединенные второй задатчик
5 коэффициента, шестой блок умножения, пятый сумматор, третий блок извлечения квадратного корня, шестой сумматор, седьмой блок умножения, седьмой сумматор, третий нелинейный элемент выход которого соединен со вторым входом второго блока деления, последовательно соединенные третий задатчик коэффициента и восьмой блок умножения, второй вход которого соединен с выходом второго блока умножения, а выход - со вторым входом четвертого блока деления, четвертый задатчик коэффициента, выход которого соединен со вторыми входами второго, четвертого и седьмого сумматоров, пятый задатчик коэффициента, выход которого соединен со вторым входом пятого сумматора, шестой задатчик коэффициента, выход которого соединен со вторым входом третьего блока умножения, седьмой задатчик коэффициента, выход которого соединен со вторым входом четвертого блока умножения, восьмой задатчик коэффициента, связанный своим выходом со вторым входом третьего блока деления, выход первого задатчика коэффициента соединен со вторым входом шестого сумматора и через четвертый нелинейный элемент - со вторым входом первого блока деления, выход которого соединен со вторыми входами второго и седьмого блоков умножения, выход второго задатчика коэффициента подключен ко вторым входам шестого блока умножения и первого блока умножения, выход которого соединен со вторым входом пятого блока умножения, причем первый и второй входы первого сумматора являются соответствующими входами блока оценки времени запаздывания, выходом которого является выход третьего блока деления.
Новым в предлагаемом устройстве является наличие новых связей. Новые связи (соединение первого и второго входов блока оценки времени запаздывания соответственно с выходами радиоприемного блока и датчика уровня воды в начале участка, выхода датчика уровня воды в конце участка со входом радиопередающего блока, выхода радиоприемного блока со вторым входом второго элемента сравнения, выхода второго элемента сравнения со вторым входом блока суммирования) позволяют повысить точность управления уровнем воды в канале.
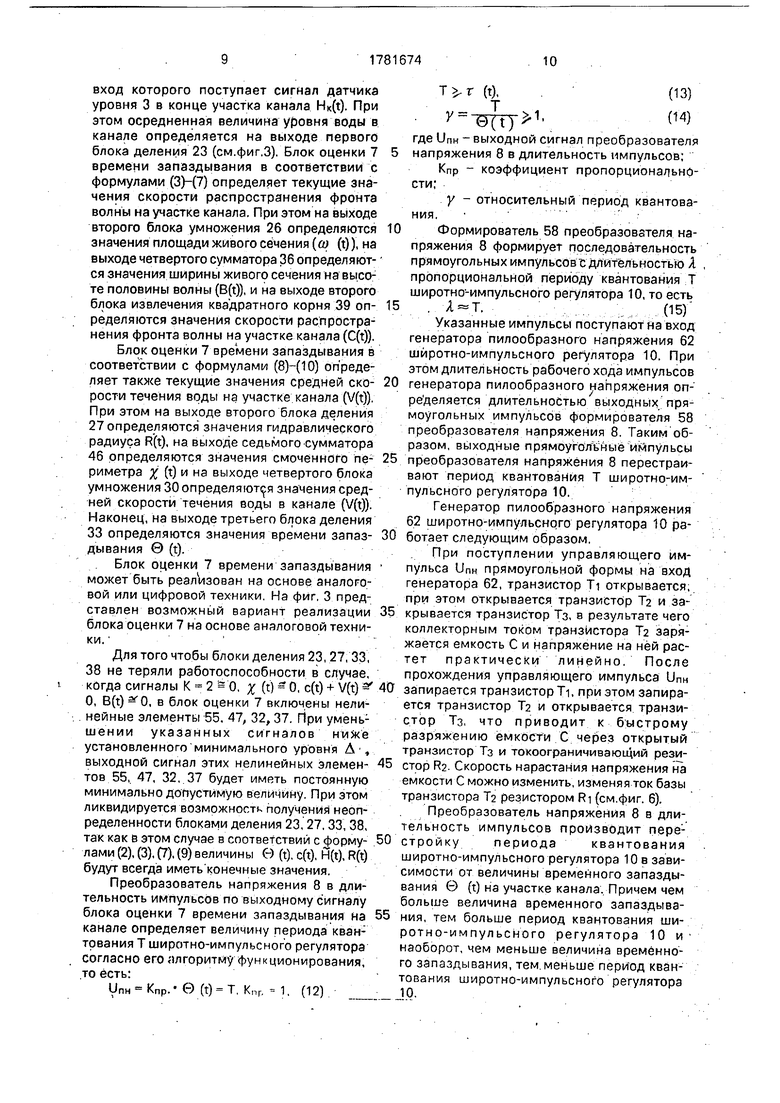
На фиг. 1 представлена функциональная схема устройства.
Устройство содержит затвор 1, датчик уровня 2 в начале участка, датчик уровня 3 в конце участка, радиопередающий блок 4, радиоприемный блок 5 Е.ТОРОЙ элемент сравнения б, бло1 оценки 7 времени запаздывания, преобразователь напряжения 8 в длительность импульсов, блок суммирования 9, широтно-импульсный регулятор 10, первый элемент сравнения 11, задатчик уровня начала участка 12 задатчик уровня конца участка 13 и исполнительный блок 14.
Радиопередающий блок 4 содержит последовательно соединенные частотный модулятор 15 и передатчик 16 (фиг. 1),
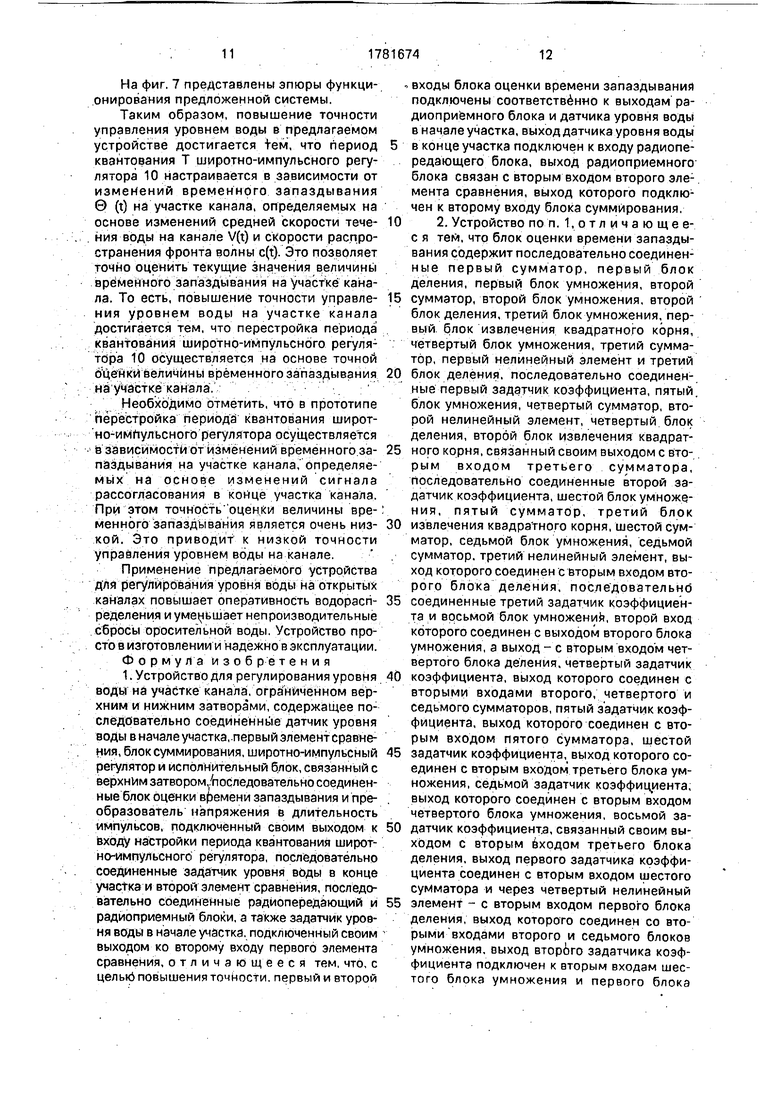
Радиоприемный блок5 содержит после5 довательно соединенные радиоприемник
17, усилитель 18, демодулятор 19. усилитрль
с емкостными накопителями 20 и выходной
блок 21 (фиг. 2).
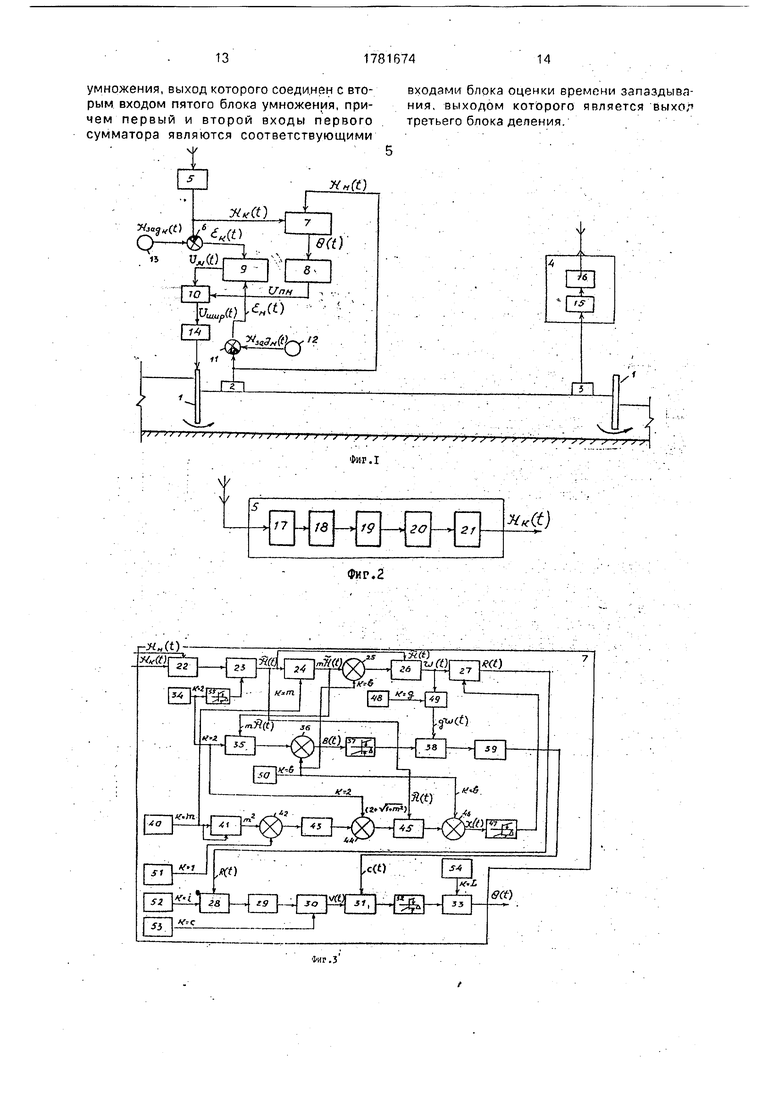
Блок оценки 7 времени запаздывания
0 содержит последовательно соединенные первый сумматор 22, первый блок деления 23, первый блок умножения 24, второй сумматор 25, второй блок умножения 26, второй блок деления 27, третий блок умножения 28,
5 первый блок извлечения квадратного корня 29, четвертый блок умножения 30, третий сумматор 31, первый нелинейный элемент 32 и третий блок деления 33, последовательно соединенные первый задатчик коэффи0 циента 34, пятый блок умножения 35. четвертый сумматор 36, второй нелинейный элемент 37, четвертый блок деления 38, второй блок извлечения квадратного корня 39, второй задатчик коэффициента 40, шестой
5 блок умножения 41, пятый сумматор 42, третий блок извлечения квадратного корня 43, шестой сумматор 44, седьмой блок умножения 45, седьмой сумматор 46, третий нелинейный элемент 47, третий задатчик
0 коэффициента 48, восьмой блок умножения 49, четвертый задатчик коэффициента 50, пятый задатчик коэффициента 51, шестой задатчик коэффициента 52, седьмой задатчик коэффициента 53, восьмой задатчик ко5 эффициента 54, четвертый нелинейный элемент 55 (фиг. 3).
Преобразователь напряжения 8 в длительность импульсов содержит последовательно соединенные девятый задатчик 56
0 коэффициента, девятый блок умножения 57 и формирователь 58 последовательных прямоугольных импульсов (фиг. 4)
Широтно-импульсный регулятор 10 содержит выделитель 59 модуля, компаратор
5 60 и формирователь 61 управляющих импульсов, управляемый генератор 62 пилообразного напряжения и релейный элемент 63 (фиг. 5).
В данном устройстве применяются дат0 чики уровня типа РУ-33, отличающиеся от других известных датчиков уровня повышенной точностью измерения ( ± 5 мм) и большой надежностью функционирования
5На фиг. 6 представлена электрическая
схема управляемого генератора 62 пилообразного напряжения.
Текущее значение скорости распространения фронта волны на участке канала опредляется соотношением1
W-
В (г
o(t) b + mH(t)H(t), B(t)b + 2mH(t), m ,
fiw.JkM+Mil
&(t) - площадь живого сечения;
B(t) - ширина живого сечения на высоте половины волны.;
m - коэффициент откоса боковых стенок;
р-угол наклона линии откоса к горизонте;
Ь ширина живого сечения потока по низу;
HH(t), HK(t) - текущие значения уровней воды в начале и конце участка канала соответственно;
H(t) - осредненная величина уровня воды в канале.
Текущее значение средней скорости течения воды на участке канала определяется выражением:
V(t) c/R(t)i ,(8)
rfleR(t) -ffЈf С
X (t) b + 2 + VrT+ m2 flf(t). (10) R(t) - гидравлический радиус; с - коэффициент Шези;
Выражения (4)-(6), (8), (9) справедливы для случая трепецеидального русла.
Устройство работает следующим обра- зом.
При равенстве значений уровней и заданий в начале и (или) в конце участка канала выходные сигналы задатчиков 12, 13 и датчиков 2, 3 соответственно равны, выход- ные сигналы е K(t), F H(t) блоков сравнения б, 11 равны нулю, выходной управляющий сигнал широтно-импульсного регулятора 10 соответствует данному положению затвора 1, исполнительный блок 14 отключен, следо- вательно затвор 1 не перемещается.
Текущие значения уровня воды в конце участка канала поступают на вход радиопередающего блока 4, при этом модулятор 15 генерирует одну из частот fi... f2. Моделиру- ющая частота, воздействующая на несущую частоту передатчика 16. выбирается в диапазоне нужных частот (УКВ диапазон).
Сигналы, поступающие от радиопередающего блока 4, усиливаются и демодулиру- ются, радиоп риемным блоком 5. В результате на выходе выходного блока 21 появляются сигналы, пропорциональные текущим значениям уровня воды в конце участка канала (Hx(t)) Эти сигналы поступают
10
15
20
25
30
35
40 45
50 55
на второй вход второго элемента сравнения 6 и на первый вход блока оценки 7 времени запаздывания. В результате на выходе второго элемента сравнения 6 формируются сигналы рассогласования Ј K(t) между заданным и текущим значениями уровня воды в конце участка канала. Эти сигналы поступают на первый вход блока суммирования 9.
Отклонения уровня воды в начале участка канала от заданного значения вызывают появление сигналов рассогласования к H(t). Эти сигналы поступают на второй вход блока суммирования 9. При этом на выходе блока суммирования появляются сигналы Ub(t), пропорциональные отклонениям уровней воды в начале и конце участка канала Формирователь 61 по сигналам компаратора 60 и релейного элемента 63 формирует последовательность управляющих импульсов, амплитуда которых постоянна, а длительность и знак каждого из которых зависит от модуля и знака сигналов UM(t) соответственно
Закон формирования длительности выходных управляющих импульсов широтно- импульсного регулятора 10 может быть, например, следующим- г (t) KH f H(t)+KK f K(t). Ui const, (11) где т (t), Ui(t) - длительность и амплитуда управляющих импульсов широтно-импульсного регулятора соответственно;
Кн. Кк постоянные коэффициенты соответственно начала и конца участка канала характеризующие специфические особенности участка (глубина, ширина, длина и т.д.),
Выходные управляющие импульсы широтно-импульсного регулятора 10 воздействуют на исполнительный блок 14, который изменяет положение затвора 1 начала участка канала. При этом изменяется водопо- дача на участок канала.
Необходимо отметить, что режимы работы участка канала в течение поливного сезона меняются в широком диапазоне. При этом переход от одного режима работы к другому приводит к значительному изменению величины временного запаздывания на участке канала В связи с этим для повышения точности регулирования необходима перестройка величины периода квантования широтно-импульсного регулятора 10 в зависимости от изменений величины времени запаздывания на участке канала.
В отличие от системы по прототипу перестройка величины периода квантования широтно-импульсного регулятора 10 осуществляется следующим образом
Сигнал датчика уровня 2 Р начале участка Нн(т.) поступает на второй вход блока оценки 7 времени запаздывания ня первый
вход которого поступает сигнал датчика уровня 3 в конце участка канала HK(t). При этом осредненная величина уровня воды в канале определяется на выходе первого блока деления 23 (см.фиг.З), Блок оценки 7 времени запаздывания в соответствии с формулами (3)-(7) определяет текущие значения скорости распространения фронта волны на участке канала. При этом на выходе второго блока умножения 26 определяются значения площади живого сечения (со (т)), на выходе четвертого сумматора 36 определяются значения ширины живого сечения на высоте половины волны (B(t)), и на выходе второго блока извлечения квадратного корня 39 оп- ределяются значения скорости распространения фронта волны на участке канала (C(t)).
Блок оценки 7 времени запаздывания в соответствии с формулами (8)-(10) определяет также текущие значения средней ско- рости течения воды на участке канала (V(t)), При этом на выходе второго блока деления 27 определяются значения гидравлического радиуса R(t), на выходе седьмого сумматора 46 определяются значения смоченного пе- риметра % (т) и на выходе четвертого блока умножения 30 определяются значения средней скорости течения воды в канале (V(t)). Наконец, на выходе третьего блока деления 33 определяются значения времени запаз- дывания 0 (t).
Блок оценки 7 времени запаздывания может быть реализован на основе аналоговой или цифровой техники. На фиг. 3 представлен возможный вариант реализации блока оценки 7 на основе аналоговой техники.
Для того чтобы блоки деления 23, 27, 33, 38 не теряли работоспособности в случае, когда сигналы К 2 0, % (t) 0, c(t) + V(t) - О, B(t) -0, в блок оценки 7 включены нелинейные элементы 55, 47, 32,37. При умень: шении указанных сигналов ниже установленного минимального уровня А выходной сигнал этих нелинейных элемен- тов 55, 47, 32, 37 будет иметь постоянную минимально допустимую величину. При этом ликвидируется возможности получения неопределенности блоками деления 23, 27,33, 38, так как в этом случае в соответствии с форму- лами (2), (3), (7), (9) величины в (t), c(t), H(t), R(t) будут всегда иметь конечные значения.
Преобразователь напряжения 8 в длительность импульсов по выходному сигналу блока оценки 7 времени запаздывания на канале определяет величину периода кван: тования Т широтно-импульсного регулятора согласно его алгоритму функционирования, то есть:
Упн - Кпр. 0 (t) Т. КпГ - 1. (12)
(t),(13)
У ,(И
где иПн - выходной сигнал преобразователя напряжения 8 в длительность импульсов;
КПр - коэффициент пропорциональности;
у - относительный период квантования.
Формирователь 58 преобразователя напряжения 8 формирует последовательность прямоугольных импульсовъ длительностью Л пропорциональной периоду квантования Т широтно-импульсного регулятора 10, то есть . .(15)
Указанные импульсы поступают на вход генератора пилообразного напряжения 62 широтно-импульсного регулятора 10. При этом длительность рабочего хода импульсов генератора пилообразного напряжения определяется длительностью выходных прямоугольных импульсов формирователя 58 преобразователя напряжения 8. Таким образом, выходные прямоугольные импульсы преобразователя напряжения 8 перестраивают период квантования Т широтно-импульсного регулятора 10.
Генератор пилообразного напряжения 62 широтно-импульсного регулятора 10 работает следующим образом,
При поступлении управляющего импульса 11пн прямоугольной формы на вход генератора 62, транзистор Ti открывается, при этом открывается транзистор Т2 и закрывается транзистор Тз, в результате чего коллекторным током транзистора Та заряжается емкость С и напряжение на ней растет практически линейно. После прохождения управляющего импульса Urm запирается транзистор TL при этом запирается транзистор Т2 и открывается транзистор Тз, что приводит к быстрому разряжению емкости С через открытый транзистор Тз и токоограничивающий резистор R2 Скорость нарастания напряжения на емкости С можно изменить, изменяя ток базы транзистора Т2 резистором RI (см.фиг. 6).
Преобразователь напряжения 8 в длительность импульсов производит пере: стройку периода квантования широтно-импульсного регулятора 10 в зависимости от величины временного запаздывания 0 (т) на участке канала. Причем чем больше величина временного запаздывания, тем больше период квантования широтно-импульсного регулятора 10 и наоборот, чем меньше величина временного запаздывания, тем меньше период квантования широтно-импульсного регулятора 10.
На фиг. 7 представлены эпюры функционирования предложенной системы.
Таким образом, повышение точности управления уровнем воды в предлагаемом устройстве достигается тем, что период квантования Т широтно-импульсного регулятора 10 настраивается в зависимости от изменений временного запаздывания 0 (t) на участке канала, определяемых на основе изменений средней скорости течения воды на канале V(t) и скорости распространения фронта волны c(t). Это позволяет точно оценить текущие значения величины временного запаздывания на участке канала. То есть, повышение точности управления уровнем воды на участке канала достигается тем, что перестройка периода квантования широтно-импульсного регулятора 10 осуществляется на основе точной оценки величины временного запаздывания на участке канала.
Необходимо отметить, что в прототипе перестройка периода квантования широтно-импульсного регулятора осуществляется в зависимости от изменений временного запаздывания на участке канала, определяемых на основе изменений сигнала рассогласования в конце участка канала. При этом точность оценки величины временного запаздывания является очень низкой. Это приводит к низкой точности управления уровнем воды на канале
Применение предлагаемого устройства для регулирования уровня воды на открытых каналах повышает оперативность водорасп- ределения и уменьшает непроизводительные сбросы оросительной воды Устройство просто в изготовлении и надежно в эксплуатации. Формула изобретения 1. Устройство для регулирования уровня воды на участке канала, ограниченном верхним и нижним затворами, содержащее последовательно соединенные датчик уровня воды в начале участка, первый элемент сравнения, блок суммирования, широтно-импульсный регулятор и исполнительный блок, связанный с верхним затвором,оследовательно соединенные блок оценки времени запаздывания и преобразователь напряжения в длительность импульсов, подключенный своим выходом к входу настройки периода квантования широтно-импульсного регулятора, последовательно соединенные задатчих уровня воды в конце участка и второй элемент сравнения, последовательно соединенные радиопередающий и радиоприемный блоки, а также задатчик уровня воды в начале участка, подключенный своим выходом ко второму входу первого элемента сравнения, отличающееся тем, что, с целью повышения точности первый и второй
входы блока оценки времени запаздываний подключены соответственно к выходам радиоприёмного блока и датчика уровня воды в начале участка, выход датчика уровня воды
в конце участка подключен к входу радиопередающего блока, выход радиоприемного блока связан с вторым входом второго элемента сравнения, выход которого подключен к второму входу блока суммирования.
0 2. Устройство по п. 1, о т л и ч а ю ще е- с я тем, что блок оценки времени запаздывания содержит последовательно соединен- ные первый сумматор, первый блок деления, первый блок умножения, второй
5 сумматор, второй блок умножения, второй блок деления, третий блок умножения, первый блок извлечения квадратного корня, четвертый блок умножения, третий сумматор, первый нелинейный элемент и третий
0 блок деления, последовательно соединенные первый задатчик коэффициента, пятый, блок умножения, четвертый сумматор, второй нелинейный элемент, четвертый блок деления, второй блок извлечения квадрат5 ного корня, связанный своим выходом с вторым входом третьего сумматора, последовательно соединенные второй задатчик коэффициента, шестой блок умножения, пятый сумматор, третий блок
0 извлечения квадратного корня, шестой сумматор, седьмой блок умножения, седьмой сумматор, третий нелинейный элемент, выход которого соединен с вторым входом второго блока делания, последовательнб
5 соединенные третий задатчик коэффициента и восьмой блок умножения, второй вход которого соединен с выходом второго блока умножения, а выход - с вторым входом четвертого блока деления, четвертый задатчик
0 коэффициента, выход которого соединен с вторыми входами второго, четвертого и седьмого сумматоров, пятый задатчик коэффициента, выход которого соединен с вторым входом пятого сумматора, шестой
5 задатчик коэффициента, выход которого соединен с вторым входом третьего блока умножения, седьмой задатчик коэффициента, выход которого соединен с вторым входом четвертого блока умножения, восьмой за0 датчик коэффициента, связанный своим выходом с вторым входом третьего блока деления, выход первого задатчика коэффициента соединен с вторым входом шестого сумматора и через четвертый нелинейный
5 элемент - с вторым входом первого блока деления, выход которого соединен со вторыми входами второго и седьмого блоков умножения, выход вторбго задатчика коэффициента подключен к вторым входам шестого блока умножения и первого блока
умножения, выход которого соединен с вто-входами блока оценки времени запаздыеарым входом пятого блока умножения, при-ния, выходом которого является выхоя
чем первый и второй входы первоготретьего блока деления, сумматора являются соответствующими
X
ХнЮ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования уровня воды на участке канала | 1986 |
|
SU1418407A1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Устройство для регулирования уровня воды на участке оросительного канала | 1987 |
|
SU1569383A1 |
| Система регулирования уровня воды в бьефе оросительного канала | 1985 |
|
SU1357928A1 |
| Способ управления вытягиванием волокон при формовании и устройство для его осуществления | 1989 |
|
SU1686047A1 |
| Устройство для регулирования уровня воды в канале | 1986 |
|
SU1348788A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ПЕРЕМЕННЫМ ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ | 2003 |
|
RU2258950C2 |
| Импульсный регулятор уровня воды в канале | 1985 |
|
SU1288655A1 |
| Устройство для регулирования уровня воды в канале | 1983 |
|
SU1095143A2 |

Изобретение относится к технике автоматического регулирования уровня воды в открытых каналах. Целью изобретения является повышение точности регулирования уровня воды на участке канала, ограниченном верхним и нижним затворами. Указанная цель достигается за счет повышения точности оценивания транспортного запаздывания, учитываемого при формировании управляющих воздействий на верхний затвор. 1 з.п.ф-лы, 7 ил.
()ect) f
ЛЛГ
-i
VrnH1
U..W
%«).
,; u«(o ,
Т,«ГJr...«T,
11
T,
1 ЛПГ
II
Ф г 7
ч
3
| Устройство для регулирования уровня воды в канале | 1983 |
|
SU1095143A2 |
| Устройство для регулирования уровня воды в канале | 1986 |
|
SU1348788A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
