о
05
1
Изобретение относится к измерительной технике и предназначено для использования в системах обработки сигналов доплеровс- ких измерителей скорости транспортных средств.
Цель изобретения - повышение точности измерения донлеровского сдвига частоты сигнала с несимметричным спектром и расширение функциональных возможностей путем получения информации об угле зонди- руюш,его излучения.
На чертеже приведена структурная электрическая схема следяшего преобразователя для измерения частоты сигналов доплеровс- ких измерителей скорости транспортных средств.
Следяший преобразователь для измерения частоты сигналов доплеровских измерителей скорости транспортных средств содержит первый и второй синхронные детекторы 1 и 2 соответственно, формирователь 3 опшбки слежения, фазорасшепи- тель 4, управляемый генератор 5, перемпо- житель 6, интегрируюший усилитель 7, делитель 8 напряжений, функциональ |ый преобразователь 9 угла зондирующего излучения.
Следяший преобразователь для измерения частоты сигналов доплеровских измерителей скорости транспортных средств работает следуюшим образом.
Доплеровский сигнал с частотой Ki поступает на первые входы синхронных детекторов 1 и 2. На вторые входы синхронных детекторов с выходов фазоврапгате- ля 4 поступают два квадратурных сигнала с частотой управляемого генератора р5. С выходов синхронных детекторов два ортогональных сигнала с частотой (Рл-FS) поступают на входы формирователя 3 ошибки слежения. Сигнал на выходе формирователя 3 ошибки слежения представляет собой напряжение, амплитуда которого пропорциональна частоте входного си| нала ую- го формирователя, а полярность определяется фазовым сдвигом входных сигналов формирователя (знаком разности частот Рд-РЛ), т.е. представляет собой 01пибку слежения следяп;его преобразователя для из.мерения частоты сигналов доплеровских измерителей скорости транспортных средств.
Напряжение ошибки слежения через перемножитель 6 поступает на вход иптегри- руюшего усилителя 7, вызывая изменение его выходного напряжения и, соответственно, перестройку управляемого генератора 5. Пе1406716
0
5
0
5
0
5
0
5
рестрой а (изменение частоты выходного сигнала) управляе.мого генератора 5 приводит к уменыпению слежения. Рели угол зондируюп1его излучения доплеровского измерителя скорости не меняется, то указанная перестройка приводит к уменьп ению оншбки слежения до нуля.
Д.чя повьппения точности измерения при уг ловых колебаниях зондирующего излучения на выходе функционального преобразователя 9 с помопгью делителя 8 формируется корректирующее напряжение, которое поступает на другой вход пере.мпо- жите. 1Я 6. На выходе делителя 8 формируется напряжение, пропорциональное угловым кслебаниям транспортного средства, что рг1С1ииряет функциональные возможности устройства.
Формула u:ior fiereHu.4
(. е;:.Я1Ций преобразоватсмь для измерения часготы сигна;1ов доплеровских изме- рите.1С(1 скорости т)апспортных средств, со- держаш.ий первьп и второй синхронные детекторы, первые входы которых объединены и являются входом преоб)азователя, выходы синхронных детекторов соединены с входами формирователя ошибки с.чежения, вторые н.Х Эды синхронных детекторов соединены с выходами фазового расщепления, вход которого соединеп с выходом уп)ав- ляемо1-о генератора, отличающийся тем, что, с це.1ью повышения точности измерения доплеровского сдвига частоты сигнала с не- си.мметричным спектром и расширения функци :)пальных возможностей путем получения информации об угле зопди)ующего излучения, в него введены неремножитель, интегрируюший уси.ли1ель, делитель }1аиря- жения и функциональный преобразователь угла зондируюнито из.чучения, причем вьгход формирователя слежения через последовательно соединенные перемножитель и интегрируюший усилитель соединен с уп- рав,чяе.мым генерато|)ом и первым входом де- .пителя 1ап))яжения, а выход интегрирующего усилителя является первым выходом | реобразователя, при этом выход неремно- жите;1я подключен к второму входу делителя иаиряжения, выход которого через функциональный преобразователь угла зондирующего излучения соединен с другим входом перемнС Жителя, при это.м выход делителя напряжения является вторым выходом преобразователя устройства.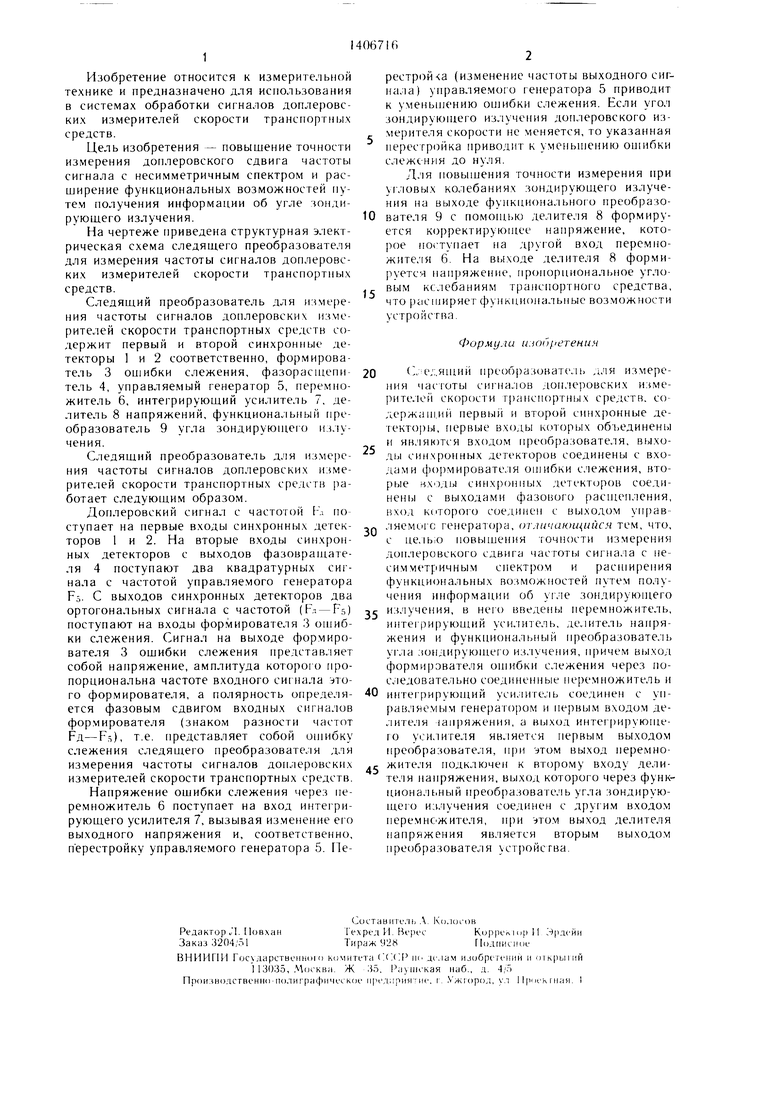
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИИ И РАДИОЛОКАТОР С ДОПЛЕРОВСКИМ ПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2580507C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 2011 |
|
RU2492505C1 |
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444452C1 |
| Способ измерения действительной скорости движения наземных транспортных средств и устройство для его осуществления | 1989 |
|
SU1835528A1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА. | 2014 |
|
RU2571148C1 |
| СПОСОБ РАННЕГО ОБНАРУЖЕНИЯ ПОЖАРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2703366C1 |
| Ультразвуковой эхокардиограф | 1986 |
|
SU1530175A1 |
| Доплеровский измеритель скорости и угла сноса с функцией измерения истинной высоты с реализацией собственной чувствительности приёмного устройства | 2024 |
|
RU2839852C1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности измерения доплеровского сдвига частоты сигнала с несимметричным спектром и расширение функциональных возможностей путем получения информации об угле зондирующего излучения. Устр-во содержит синхронные детекторы 1 и 2, формирователь 3 ошибки слежения, фазорасще- питель 4, управляемый г-р 5, перемножитель 6, интегрирующий усилитель 7, делитель 8 напряжений и функциональный преобразователь 9 угла зондирующего излучения. При поступлении доплеровского сигнала на детекторы 1 и 2, они образуют два ортогональных сигнала, из которых формируется напряжение ошибки слежения. Это напряжение, пройдя перемножитель 6 и усилитель 7, осуществляет перестройку г-ра 5, что приводит к уменьщению ошибки слежения. Для повышения точности измерения при угловых колебаниях зондирующего излучения на выходе преобразователя 9 с помощью делителя 8 формируется корректирующее напряжение, поступающее на другой вход перемножителя 6. На выходе делителя 8 формируется напряжение, пропорциональное угловым колебаниям транспортного средства, что обеспечивает более широкие функциональные возможности устр-ва. I ил. i (Л
| Следящий аналого-дискретный преобразователь для измерения частоты сигналов допплеровских измерителей скорости | 1981 |
|
SU1018192A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
