;о со
Изобретение относится к машинострое- :нию И может быть использовано для подвеса прецизионных роторных узлов.
Цель изобретения - уменьшение ра- |диальных колебаний вала путем управления Обращением промежуточной втулки.
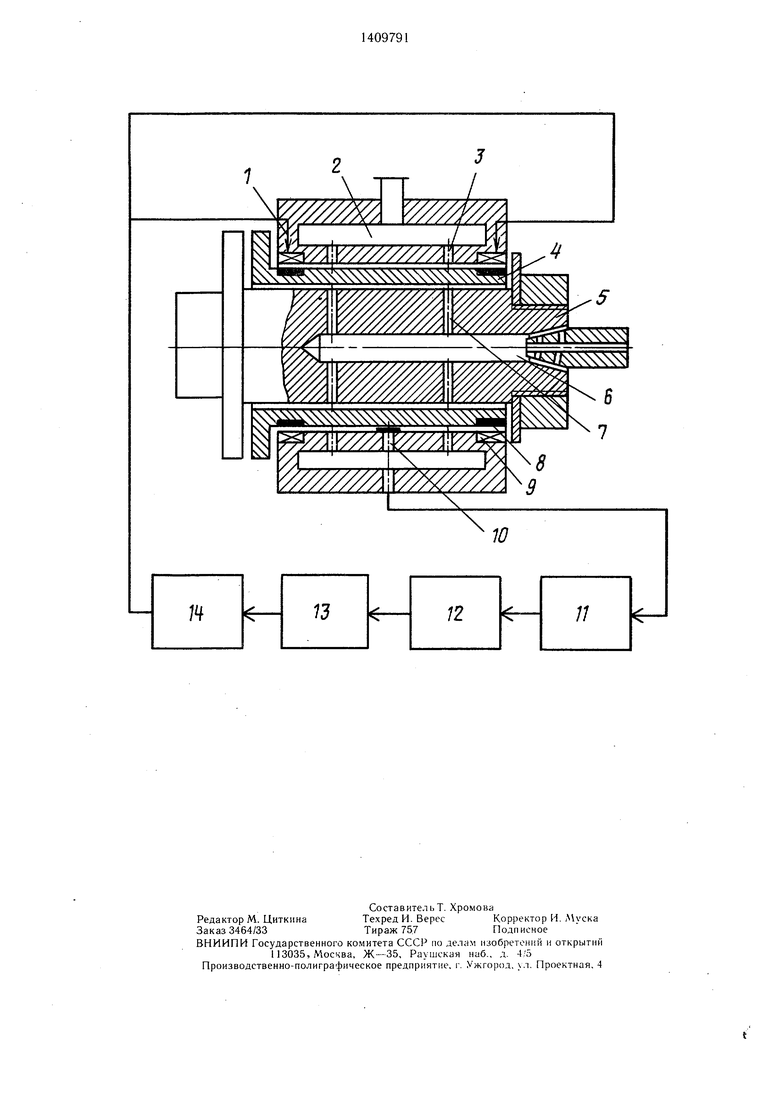
На чертеже изображена предлагаемая аэростатическая опора.
; Аэростатическая опора состоит из корпуса 1 с распределительной камерой 2 подачи сжатого воздуха и радиальными питательными каналами 3, плавающей втулки 4, установленной в корпус с зазором, вала 5, вставленного в плавающую втулку с зазором и содержащего осевой .вал 6 и радиальные 7 питательные каналы, бесконтактного привода принудительного вращения промежуточной втулки, гистерезисное роторное покрытие 8 которого выполнено на наружной поверхности промежуточной втулки, а статорные обмотки 9 смонтированы в корпусе. Опора также включает последовательно соединенные датчик 10 радиальных ко- пебаний вала, преобразователь 11, усилитель 12, преобразователь 13 напряжение- частота и выходной усилитель 14. Пос- педний связан со статорными обмотками 9 Гистерезисного привода. Устройство работает следующим образом.
При подаче сжатого воздуха в распределительную камеру 2 корпуса 1 воздух че- эез питательные каналы 3 поступает в зазор между ним и плавающей втулкой 4, :оздавая несущий воздущный слой. Одновременно сжатый воздух подается в осевой анал 6 вала 5 и через питательные каналы 7 поступает в зазор между ва- пом 5 и плавающей втулкой 4, создавая чесущий воздущный слой. При вращении ва- па 5 гистерезисный привод по сигналу из датчика 10 радиальных колебаний вала через преобразователь 11, усилитель 12, пре- эбразователь 13 напряжения-частота и вы- {ходной усилитель 14 упраЕ5ляет вращением 1лавающей втулки 4. Воспринимаемый дат- Миком 10 сигнал пропорционален амплитуде Ьадиальных колебаний вала. Этот сигнал преобразователем 11 преобразуется в аналоговый, усиливается усилителем 12, блоком 13 преобразуется в частотный сигнал и после выходного усилителя подается в статорные обмотки гистерезисного привода. Так как выходным сигналом усилителя 12 является переменный электрический сигнал, модулируемый согласно сигналу датчика 10 частоты, то гистерезисный привод, принимающий от усилителя 14 переменный сигнал меняющейся частоты, осуществляет вращение своего IpOTOpa - промежуточной втулки - с пе- |ременной угловой скоростью. При этом вращение плавающей втулки автоматически ме0
5
0
5
няется в направлении уменьщения радиальных колебаний вала. Это достигается тем, что волнистость внутренней поверхности корпуса 1 и волнистость внутренней поверхности плавающей втулки 4 настраиваются так, чтобы максимальному расстоянию между выступом волнист ости внутренней поверхности корпуса 1 и гладкой наружной поверхностью промежуточной втулки 4 соответствовало минимальное расстояние между впадиной волнистости внутренней поверхности плавающей втулки 4 и гладкой наружной поверхностью вала 5, тем самым обеспечивая демпфирование радиальных колебаний вала 5.
Снижение радиальных колебаний вала, вращающегося в подвещен.ной газовыми слоями плавающей втулке, происходит путем управления вращением плавающей втулки, что и составляет преимущество перед прототипом, в котором вращение плавающей втулки неуправляемо, из-за чего возникают трудности при подборе динамических режимов. Кроме того, турбулентный поток смазки является причиной возникновения радиальных колебаний вала в прототипе. В предлагаемом аэростатическом подщипни- ке радиальные колебания демпфируются при помощи управления вращением плавающей втулки, ибо волнистость внутренней поверхности плавающей втулки является синфазной с волнистостью внутренней поверхности корпуса, т. е. минимальному расстоянию от выступа волнистости внутренней поверхности корпуса до гладкой наружной поверхности плавающей вту.пки соответствует максимальное расстояние от впадины волнистости внутренней поверхности плавающей втулки до гладкой поверхности вала.
Формула изобретения
Аэростатическая опора, содержащая корпус с распределительными камерами подачи
0 сжатого воздуха и радиальными питательными каналами, цапфу вала и размещенную между ними плавающую втулку с бесконтактным приводом ее принудительного вращения, отличающаяся тем, что, с целью уменьщения радиальных колебаний вала, она снабжена последовательно соединенными датчиком радиальных колебаний вала, преобразователем, усилителем, преобразователем напряжение-частота и выходным усилителем, бесконтактный привод принудительQ ного вращения плавающей втулки выполнен гистерезисным, обмотки которого размещены в корпусе и соединены с выходом выходного усилителя, а роторное гистерезисное покрытие выполнено на наружной поверхности плавающей втулки.
0
5
/ХУ/////////ЛУ/Л
5
/////////АУ/Щ//// 9
//ЛУ/Л
/
Х1
У/Л
й:
.УЧЧЧЧ
г
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод для дискового носителя информации | 1980 |
|
SU949714A1 |
| Подшипниковый узел | 1980 |
|
SU941725A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ОТКЛОНЕНИЙ ОСИ ВРАЩЕНИЯ ОБЪЕКТА | 1991 |
|
RU2068990C1 |
| ОПОРА ВАЛА РОТОРА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ (ВАРИАНТЫ), БРАСЛЕТНОЕ УПЛОТНЕНИЕ ОПОРЫ ВАЛА РОТОРА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ, УЗЕЛ УПЛОТНИТЕЛЬНОГО БРАСЛЕТА ОПОРЫ ВАЛА РОТОРА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ, СЕКЦИЯ КОЛЬЦА БРАСЛЕТНОГО УПЛОТНЕНИЯ ОПОРЫ ВАЛА РОТОРА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2603389C1 |
| ДАТЧИК УГЛА | 2004 |
|
RU2279633C2 |
| Аксиальный преобразователь частоты | 2022 |
|
RU2781082C1 |
| БЕСКОНТАКТНЫЙ ПРЕЦИЗИОННЫЙ ДИНАМИЧЕСКИЙ ДАТЧИК КРУТЯЩЕГО МОМЕНТА | 2024 |
|
RU2831515C1 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2094931C1 |
| Шпиндель металлорежущего станка | 1974 |
|
SU1386416A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2006 |
|
RU2329546C2 |
Изобретение относится к области машиностроения и может быть использовано для подвеса прецизионных роторных узлов. Цель - уменьшение радиальных колебаний вала. Аэростатический подшипник снабжен гистерезисным роторным покрытием на наружной поверхности плавающей втулки. Статорные обмотки смонтированы в корпусе. Подшипник содержит последовательно соединенные датчик радиальных колебаний, преобразователь, усилитель, преобразователь напряжение - частота и выходной усилитель. Это позволяет управлять враш,е- нием промежуточной втулки так, чтобы волнистость внутренней поверхности корпуса была синфазной с волнистостью внутренней поверхности промежуточной втулки. Происходит демпфирование радиальных колебаний по сигналу от датчика радиальных колебаний вала. 1 ил.
| Патент США № 3669514, кл | |||
| Распределительный механизм для паровых машин | 1921 |
|
SU308A1 |
