Изобретение относится к области измерительной техники, связанной, в частности, с измерением относительных угловых перемещений, и может найти применение в составе прецизионных приборов и устройств в обрабатывающей промышленности, в геодезических и навигационных приборах, в системах измерения градиента гравитации, в составе испытательных стендов.
Известен датчик угла, содержащий статорную и роторную части, на торцовых поверхностях которых выполнены криволинейные активные участки с возможностью бесконтактного взаимодействия по четырем секторным квадрантам (см., например, В.Г.Домрачев и др. Схемотехника цифровых преобразователей перемещений. Справочное пособие. М.: Энергоатомиздат. 1987, стр.60, рис.3.18). Криволинейные активные участки в этой схеме выполнены в виде спиральных растров. На торцовой поверхности статора выполнены кольцевые проточки и прорезаны радиальные пазы с угловым шагом 90°, в которые уложены обмотки возбуждения и считывания, изготовленные в виде секторов. Ротор представляет собой ферромагнитный диск, жестко закрепленный на оси, вращающейся в подшипниках качения. На торцовой поверхности диска по спирали выполнена проточка, ширина которой равна половине шага спирали. Питание обмоток осуществляется перемененным током частотой, зависящей от частотных характеристик материала статора и ротора. Магнитный поток, развиваемый обмоткой возбуждения, замыкается через зубцовый зазор и наводит ЭДС в обмотках считывания. Один период изменения выходного напряжения соответствует одному обороту ротора.
Известен также датчик угла (см. патент РФ №2199086, G 01 B 7/00 с приоритетом от 25.04.2001), содержащий статорную и роторную части, на торцовых поверхностях которых выполнены криволинейные активные участки с возможностью бесконтактного взаимодействия по четырем секторным квадрантам.
Данная схема принята за прототип.
В этом датчике активные участки выполнены в виде перфорированных окон на электропроводящем экране, а экран установлен на ползунке в форме кольца, размещенном на рычаге, который закреплен на роторе. Ротор снабжен пазами с шариками, контактирующими с окнами. Недостаток данной схемы в ограниченной чувствительности при достаточно сложной конструктивной схеме.
В предлагаемом изобретении поставлена задача: при широком диапазоне измерения обеспечить повышенную чувствительность и точность измерения, используя простейшие технологические средства.
Сущность изобретения заключается в том, что активные участки на торцовых поверхностях статора и ротора датчика выполнены в виде трех пар концентрических противолежащих (на расстоянии малого зазора) кольцевых электродных участков на статорной и роторной частях, причем на роторной части кольцевые участки расположены на жесткой подложке, где центральный кольцевой участок является собственно ротором, а его электропроводная часть разделена на четыре изолированных квадранта с возможностью их преобразования в два электрода, соединенных с источником питания, а электропроводные части внутреннего и наружного участков с помощью изолирующих полосок образуют по два полукольцевых электрода, соединенных с электронно-преобразовательной частью, при этом электроды на статорной части расположены на упругой подложке, где среднее кольцо имеет торсионную связь с внутренним и аналогичную, расположенную ортогонально, с внешним кольцом.
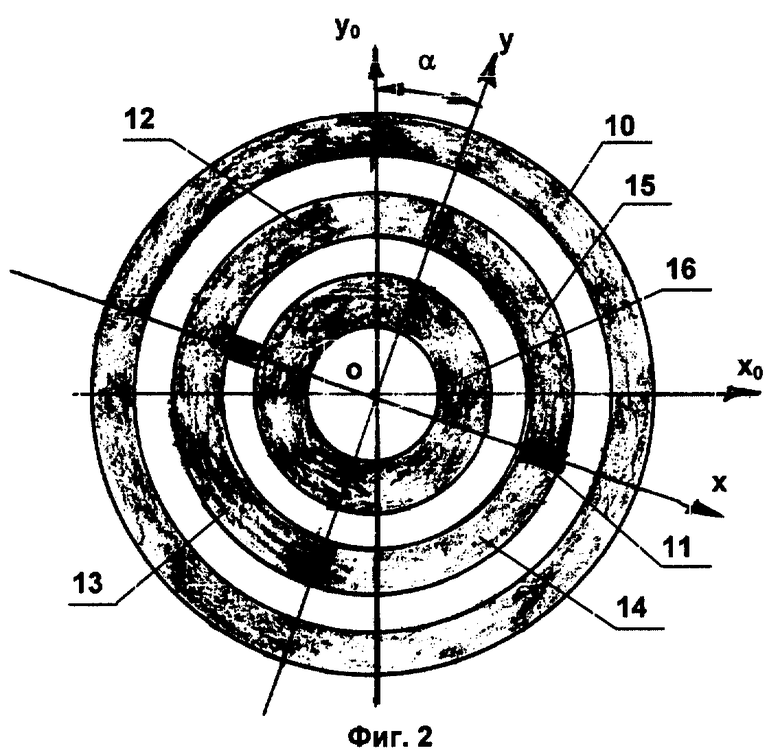
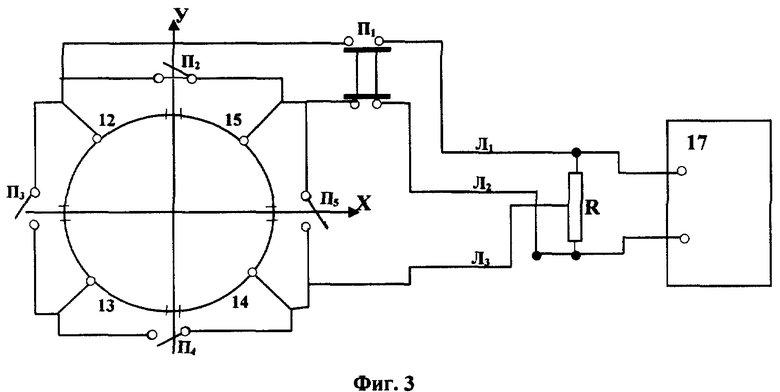
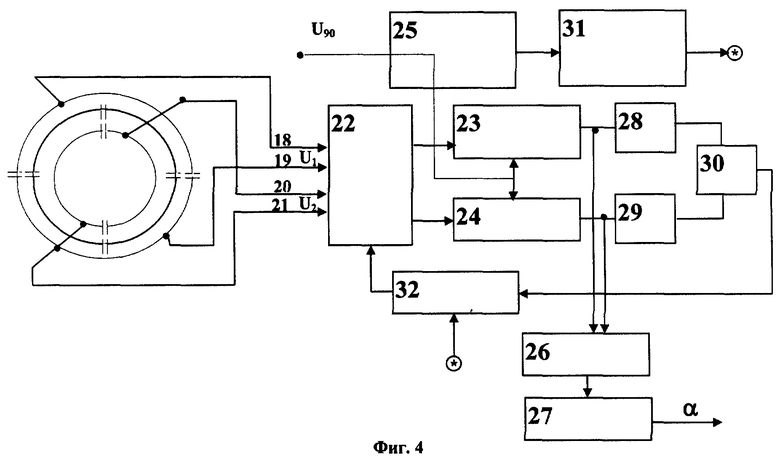
Сущность изобретения поясняется чертежами. На фиг.1 и 2 приведены формы кольцевых электродных участков на статоре и роторе соответственно. На фиг.3 изображена принципиальная схема питания с переключателями квадрантов и преобразования их в два полукольцевых электрода, разделяемых по одной оси Х или ортогональной к ней оси Y. На фиг.4 представлена принципиальная схема соединения наружных и внутренних полуколец роторной части датчика с электронно-преобразовательной частью.
Характерная особенность предлагаемого датчика заключается в использовании вспомогательного колебательного движения кольцевых пластин статорной части относительно одной из диаметральных осей, положение которой задается при повороте ротора. При этом возможны несколько режимов работы:
- измерение малых углов, когда может измеряться непосредственно угол.
- измерение небольших углов (5÷15°), когда они могут измеряться как arcsin угла,
- измерение значительных углов, когда они могут измеряться в режиме arctg (до 45°) или arcctg (свыше 45°).
Помимо этого может быть предусмотрен режим автокалибровки, позволяющий обеспечивать прецизионные измерения.
В предлагаемом датчике угла к корпусному кольцу 1 в статорной части с помощью торсионной связи 2 подсоединено наружное статорное кольцо 3 (фиг.1). Наружное кольцо 3 с помощью аналогичной связи - торсионов 4 соединено со средним кольцом 5, а последнее через торсионы 6 - с внутренним кольцом 7. Внутреннее кольцо через торсионы 8 соединено с внутренним корпусным элементом 9. Торсионные связи концентрических колец располагаются в строго ортогональных направлениях.
Электродные кольца роторной части датчика располагаются соосно со статорными и разделяются минимальным зазором. Здесь также расположены наружное кольцо 10, среднее кольцо с изолирующими полосками 11 (их четыре штуки) и квадрантами-электродами 12, 13, 14 и 15, расположенными между изолирующими полосками 11, и внутреннее 16. Все три кольца располагаются в одной плоскости на жесткой подложке. Среднее кольцо является собственно ротором с возможностью поворота на неограниченный угол α (фиг.2).
Потенциометр R запитывается от источника питания 17, а его выход образуют цепи Л1, Л2, Л3, которые через переключатели П1...П5 соединены с электродами-квадрантами 12...15 роторного кольца (фиг.3).
Полукольцевые электроды статора (фиг.4) через провода 18...21 соединены со входом мультипликативного усилителя электронно-преобразовательной части 22. Выход этого усилителя двухканальный. Первый канал образуют цепи усиленного сигнала U1, снимаемого с полукольцевых электродов 18 и 19 наружного кольца, а второй - цепи сигнала U2, снимаемого с аналогичных электродов 20 и 21 внутреннего кольца. Первый канал соединен со входом блока 23 формирования синуса угла α, а второй канал - со входом блока 24 формирования косинуса α. Для этого дополнительные входы этих блоков соединены с запоминающим устройством 25, вырабатывающим сигнал, соответствующий углу α=90°. Далее выходы блока (23) формирования синуса угла α и блока (24) формирования косинуса этого угла соединены с входами блока (26) формирования тангенса угла α (ctg(α)), а последний соединен с выходным блоком (27) определения измеряемого угла α в виде arctg(sin(α)/cos(α)) (arcctg(cos(α)/sin(α)). В последующих блоках 28 и 29 каждого канала формируются квадраты этих сигналов и далее в блоке 30 их сумма. Суммирующий блок 30 и блок относительной единицы 31 соединены с блоком 32 формирования сигнала погрешности путем определения разности полученной суммы и относительной единицы в блоке 31. Блок 32 формирования сигнала погрешности по выходу соединен (как обратная связь) с дополнительным входом мультипликативного усилителя 22.
Принцип действия датчика угла заключается в следующем. Для формирования измерительных сигналов при измерении малых и небольших углов переключателем П1 замыкают нижние контакты, замыкают контакты переключателями П2 и П4 и размыкают переключатели П3 и П5. При этом из четверки электродов ротора образуются два полукольца, ограниченных по оси ОХ. Далее на эти полукольца электроды подают напряжение питания переменного тока частотой в пределах от 100 до 400 Гц. Это приведет к возникновению механических угловых колебаний среднего кольца статорной части относительно диаметральной оси, которая является проекцией оси ОХ ротора, то есть оси, которая располагается под углом α по отношению к неподвижной оси ОХ на статоре. Колебания среднего кольца статора приведут к колебаниям наружного и внутреннего колец относительно их торсионов. Амплитуды этих колебаний для одного кольца будут пропорциональны sin(α), а для другого cos(α). Для синусного (или косинусного) канала угловая амплитуда колебаний кольца θвых может быть определена по формуле

где ξ - коэффициент относительного демпфирования кольца,

D - коэффициент демпфирования торсионов наружного (или внутреннего) кольца,
ω0 - частота угловых колебаний,
θвозб - амплитуда угловых колебаний среднего кольца статора,
ψ - угол запаздывания,
IХ1 (или IY1) - момент инерции наружного (или внутреннего) кольца относительно диаметральной оси (оси торсионов).
Напряжение в цепях определяется величиной напряжения питания и коэффициентами усиления каскадов и блоков цепей.
Величину I/ξ можно представлять как добротность Q, которая при резонансе для механических колебаний может достигать 100-400, а если наряду с механическим резонансом синхронизировать с ними электрический резонанс, то добротность может достигать тысячи и более.
Для иллюстрации возможностей датчика оценим его чувствительность при условии задания реальных исходных данных
 ;
;  ;
;  ,
,
 .
.
Получим αmin≈6·10-7 или ≈0,01 угл.сек, т.е. на три порядка меньше θвых.
Для нормирования напряжений U1 и U2 под sin(α) и cos(α), то есть под величины, не превышающие единицы, в схеме предусмотрен блок запоминающего устройства 25, в котором сохраняется уровень напряжения U90, соответствующий sin(α=90°). В блоках 23 и 24 отношений напряжений сигналы U1 и U2, снимаемые с выхода мультипликативного усилителя 22, делятся на напряжение U90, снимаемое с запоминающего устройства 25. В результате получаются значения sin(α) и cos(α), которые с обоих каналов передаются на блок 26 отношения sin(α)/cos(α), то есть на блок формирования tg(α) (или ctg(α), если α>45°). Далее сигнал подается на блок 27 формирования величины arctg(sin(α)/cos(α)) (или arcctg(cos(α)/sin(α))), в результате на выходе получается численное значение угла α.
В общем случае каналы, образуемые после мультипликативного усилителя, могут иметь неодинаковые усилительные свойства. Для их выравнивания в схеме формируется автоподстройка усиления (калибровка) одного из каналов по другому.
Для этого после блоков 23 и 24 отношений напряжений сигналы подаются на формирователи 28 и 29 квадратов синуса и косинуса угла α соответственно, а затем на блок 30 вычисления их суммы, то есть sin2(α)+cos2(α).
В данном случае можно опираться на свойство стабильности суммы квадратов для слагаемых в ортогональной системе координат. Поэтому после блока суммирования 30 сигнал подается на блок 32 разности фактического сигнала (с возможно неточной ортогональностью каналов) и единицы, снимаемой с блока 31. Полученный сигнал погрешности подается на дополнительный вход мультипликативного усилителя 22 для корректировки его коэффициента усиления в направлении обеспечения условия sin2(α)+cos2(α)-1→0, когда усилительные свойства каналов будут идентичными, а это будет обеспечивать повышенную точность измерения угла α во всем широком диапазоне.
Это наряду с другими преимуществами позволяет улучшить основные технические характеристики предлагаемого изобретения по сравнению с прототипом и, прежде всего, при широком диапазоне измерения обеспечить повышенную чувствительность и точность сравнительно простыми технологическими средствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2000 |
|
RU2172967C1 |
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| МОДУЛЯЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2303766C2 |
| Устройство для преобразования постоянного тока в синусоидальный | 1986 |
|
SU1446685A1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ФАЗОМОМЕНТНЫХ ХАРАКТЕРИСТИК ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1997 |
|
RU2129709C1 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2010 |
|
RU2438151C1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| Преобразователь перемещения в число импульсов | 1973 |
|
SU470843A1 |
| ДАТЧИК-ИЗМЕРИТЕЛЬ МАЛЫХ КРУТЯЩИХ МОМЕНТОВ | 1999 |
|
RU2162217C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
Изобретение относится к области измерительной техники, связанной, в частности, с измерением относительных угловых перемещений, и может найти применение в составе прецизионных приборов и устройств, в обрабатывающей промышленности, в геодезических и навигационных приборах, в системах измерения градиента гравитации, в составе испытательных стендов. Датчик содержит статорную и роторную части, на торцовых поверхностях которых выполнены активные участки с возможностью бесконтактного взаимодействия по четырем секторным квадрантам и определения искомого угла по взаимному угловому положению роторной части относительно статорной. Активные участки выполнены в виде трех пар концентрических противолежащих (на расстоянии малого зазора) кольцевых электронных участков на статорной и роторной частях. На роторной части кольцевые участки расположены на жесткой подложке. При этом центральный кольцевой участок является собственно ротором, а его электропроводная часть разделена на четыре изолированных квадранта с возможностью их преобразования в два полукольцевых электрода, соединенных с источником питания. Электропроводные части внутреннего и наружного участков с помощью изолирующих полосок образуют по два полукольцевых электрода, соединенных с электронно-преобразовательной частью. Электроды на статорной части расположены на упругой подложке, где среднее кольцо имеет торсионную связь с внутренним и аналогичную, расположенную ортогонально, с внешним кольцом. Электронно-преобразовательная часть помимо усилительных функций выполняет также функции калибровки путем автоподстройки усиления в процессе его функционирования. В результате наряду с измерением в широком диапазоне обеспечиваются высокая чувствительность и точность сравнительно простыми технологическими средствами. 2 з.п. ф-лы, 4 ил.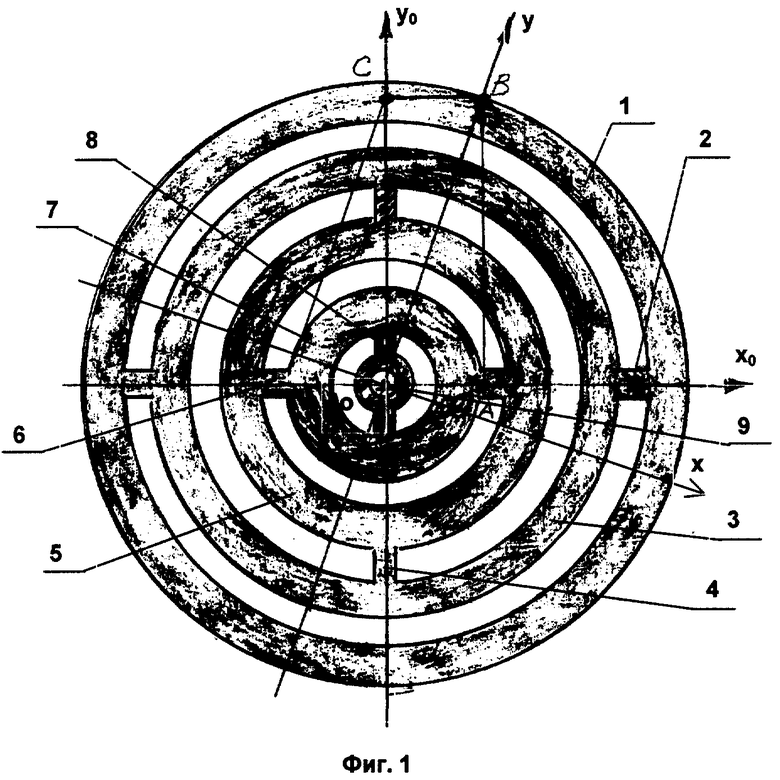
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 2001 |
|
RU2199086C2 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2191347C2 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА | 1998 |
|
RU2154257C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА | 1995 |
|
RU2161772C2 |
| DE 4326766, 16.02.1995. | |||

