Изобретение относится к приборостроительной технике, а именно к конструкции моментомеров, используемых для измерения крутящего момента на валу.
Известна система датчиков для измерения крутящего момента и вал с системой датчиков для измерения крутящего момента [патент RU 2563604 С2, МПК G01L 3/10, опубликовано: 20.09.2015], которая содержит датчик крутящего момента, расположенный на каретке с электроприводом, датчик расстояния, расположенный на той же каретке и выполненный с возможностью измерения расстояния до объекта, у которого должен быть определен крутящий момент. При этом блок управления соединен с датчиком расстояния и соединен с кареткой для вывода сигнала управления и, который предназначен для определения сигнала управления на базе сигнала о расстоянии, подаваемого датчиком расстояния. Сигнал управления представляет собой смещение датчика крутящего момента посредством каретки с электроприводом на величину, на которую подводится датчик крутящего момента на заданное расстояние до объекта. Вал имеет, по меньшей мере, один участок, который содержит, по меньшей мере, одну систему датчиков для измерения крутящего момента, раскрытую ранее. Технический результат заключается в повышении точности измерений, обеспечении защиты датчика от повреждений.
Недостатками аналога являются технологическая сложность исполнения, что в свою очередь снижает точность измерений.
Известно изобретение магнитоупругий датчик крутящего момента [патент RU 2591587 С2, МПК G01L 3/10, опубликовано: 20.07.2016], в котором содержится магнитоупругий датчик крутящего момента, содержащий передающую катушку для генерирования магнитного поля в объекте, крутящий момент которого должен определяться, причем передающая катушка имеет осевое направление и осевую торцевую плоскость передающей катушки, подводимую к объекту, и по меньшей мере две приемные катушки, разнесенные относительно передающей катушки, которые имеют, соответственно, торцевую плоскость приемной катушки, подводимую к объекту, и принимают ответный сигнал, индуцированный в объекте магнитным полем передающей катушки, причем торцевая плоскость, по меньшей мере одной из приемных катушек, выступает над торцевой плоскостью передающей катушки, причем имеются две пары приемных катушек, окружающих передающую катушку, из которых каждая пара имеет две приемные катушки, размещенные на противолежащих друг другу сторонах окружности передающей катушки, которые имеют, соответственно, приводимую к объекту торцевую плоскость приемной катушки и принимают ответный сигнал, индуцированный в объекте магнитным полем передающей катушки, причем, по меньшей мере, торцевые плоскости приемных катушек пары приемных катушек выступают над торцевой плоскостью передающей катушки, отличающийся тем, что торцевые плоскости приемных катушек пары приемных катушек расположены на одной линии с торцевой плоскостью передающей катушки.
Недостатками аналога являются технологическая сложность изделия и большие массогабаритные показатели, что в свою очередь не позволяет использовать в системах с низким моментом инерции вращающегося объекта.
В патенте США (US 7424829B2, МПК G01L 3/10; G01L 3/02, опубликовано: 16.09.2008) раскрывается датчик крутящего момента, чувствительные элементы которого выдают выходной сигнал биполярного типа, тем самым уменьшая влияние эксцентриситета вала на выходной сигнал. В датчике крутящего момента первый и второй вращающиеся валы расположены на общей оси, и эти вращающиеся валы соединены посредством торсионной штанги для определения крутящего момента, передаваемого между вращающимися валами. Датчик снабжен средством генерирования магнитного поля в радиальном направлении, центрируемым по оси средством изменения магнитного поля для измерения направления и величины магнитного потока, идущего от средства генерации вдоль осевой линии в соответствии с относительным вращением между вращающимися валами, и магнитным сенсором для обнаружения магнитного потока. Магнитный сенсор генерирует выходной сигнал, полярность которого изменяется в зависимости от направления обнаруженного магнитного потока, а величина изменяется в зависимости от размера обнаруженного магнитного потока.
Недостатком указанного датчика момента является то, что магнитный сенсор подвержен паразитным наводкам от внешних устройств (например, от электромеханических преобразователей энергии), что влияет на точность измерений.
Известно устройство измерения крутящего момента [полезная модель RU 218985 U1, МПК G01L 3/00, опубликовано: 21.06.2023], которое содержит первый и второй вал, из которых первый вал установлен коаксиально внутри второго вала и связан со вторым валом через упругое звено с закрепленными на нем тензодатчиками, причем упругое звено выполнено в виде одной упругой балки, которая своим наконечником шарнирно связана со вторым валом. Устройство содержит упругую балку в направлении изгиба выполнена суженной в сторону наконечника для обеспечения равной деформации каждого тензодатчика в месте его крепления к балке. Устройство содержит тензодатчики связанные электрическими и информационными линиями связи с приемопередатчиком энергии сигнала. Устройство содержит первый вал и может быть использовано в качестве ведущего вала при ведомом втором вале Устройство содержит второй вал может быть использован в качестве ведущего вала при ведомом первом вале.
Недостатками аналога являются технологическая сложность конструкции, а также низкая чувствительность датчика. Кроме того, у предложенного устройства большая погрешность измерений из-за низкой помехозащищенности, большие массогабаритные показатели и низкая надежность.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для бесконтактного измерения крутящего момента [патент RU №2555189 С1, МПК G01L 3/10, опубликовано: 10.07.2015], включающее ротор, с размещенными на нем тензомостом, преобразователем напряжения в частоту, выпрямителем-стабилизатором, вращающейся обмоткой трансформатора, вращающейся пластиной конденсатора емкостной связи и статором с первой неподвижной пластиной конденсатора емкостной связи, усилителем импульсов, входом через конденсатор емкостной связи, подключенным к преобразователю напряжения в частоту, неподвижной обмоткой трансформатора и электронного блока обработки информации, с модулем измерения крутящего момента. Преобразователь напряжения в частоту и усилитель импульсов электрически соединены между собой общей массой. Выход усилителя подключен ко входу модуля измерения крутящего момента. Конденсатор емкостной связи выполнен переменной емкости, причем емкость конденсатора связи изменяется в зависимости от угла поворота ротора относительно статора несколько раз за один оборот ротора от минимального до максимального значения, первая неподвижная пластина конденсатора связи через первый детектор подключена ко входу модуля измерения частоты вращения блока обработки информации.
Недостатками данного устройства являются ограниченные функциональные возможности, отсутствие возможности измерения направления вращения, высокая погрешность и низкой чувствительность датчика измерений из-за недостаточной помехозащищенности.
Задачами изобретения являются расширение функциональных возможностей и повышение точности измерений крутящего момента.
Техническим результатом является повышение помехозащищенности и стабильности измерения величины крутящего момента.
Для достижения поставленной задачи и технического результата устройство датчик крутящего момента, включающий ротор, с размещенными на нем тензометрическим мостом, трансформатором с неподвижной обмоткой и обмоткой, выполненной с возможностью вращения, выпрямительное устройство с интегрированным стабилизатором напряжения, модуль измерения крутящего момента, согласно изобретению, содержит трансформатор выполнен роторным, закрыт защитным экраном и состоит из двух чашечных магнитопроводов, установленных внутри, кольцевых статорной и роторной обмоток, причем кольцевая статорная обмотка подключена к генератору высокой частоты, а кольцевая роторная обмотка подключена к выпрямительному устройству с интегрированным стабилизатором напряжения, подключенному к модулю цифровой обработки и передачи сигнала крутящего момента с тензометрическим мостом, которые установлены на деформируемой рессоре, а модуль измерения крутящего момента содержит модуль цифрового приема сигнала крутящего момента, установленный на подшипниковом щите.
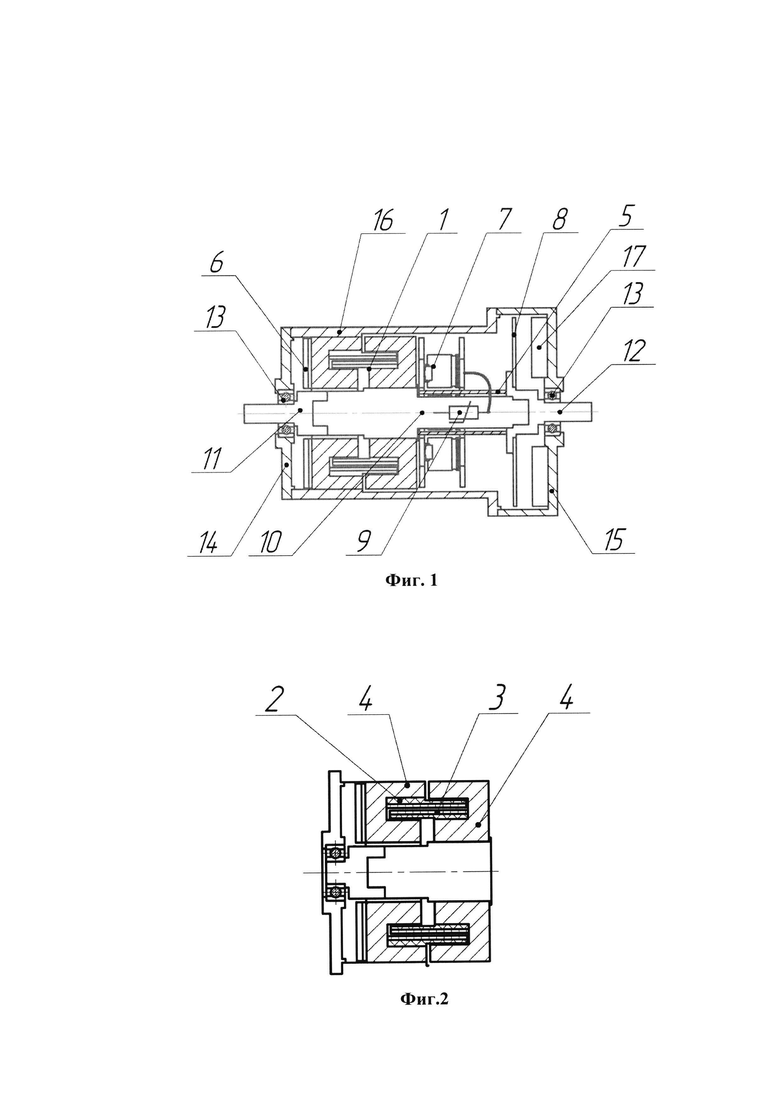
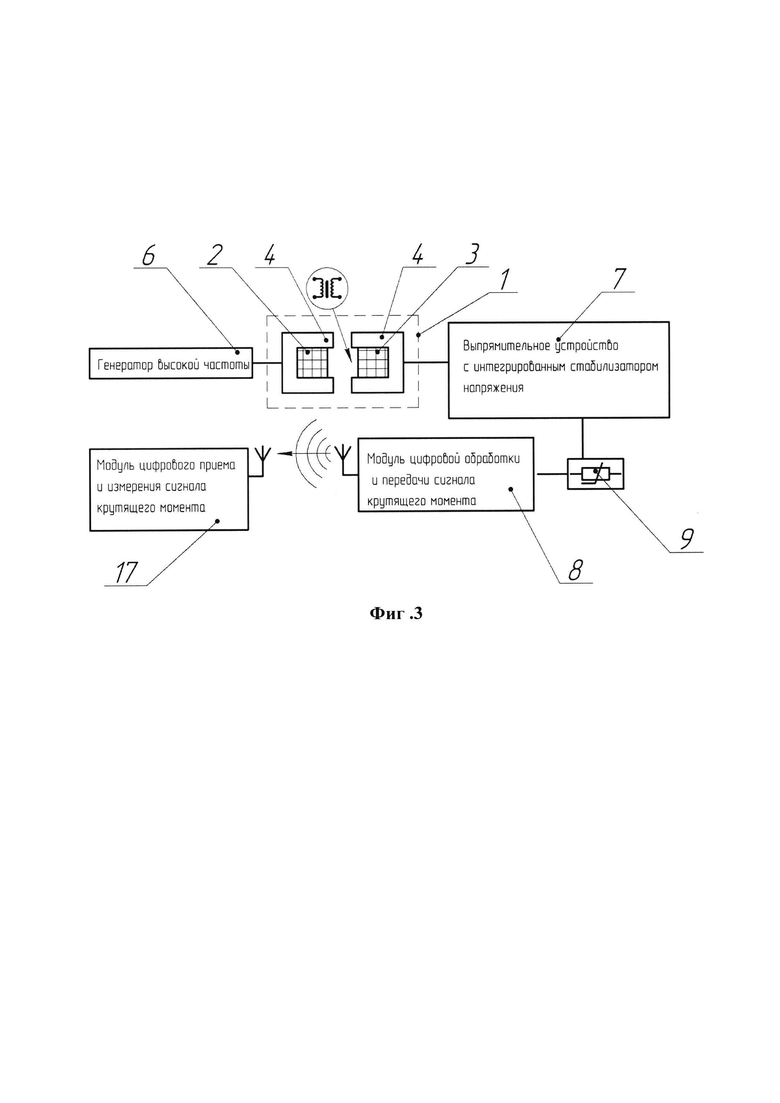
Сущность изобретения поясняется чертежами. На фиг. 1 представлен общий вид бесконтактного прецизионного динамического датчика крутящего момента: на фиг. 2 представлен роторный трансформатор с обмотками; на фиг. 3 приведена функциональная схема устройства; на фиг. 4 представлен результат испытания бесконтактного прецизионного динамического датчика крутящего момента в динамическом режиме; на фиг. 5 представлен результат испытания с изменяемым направлением вращения.
Бесконтактный прецизионный динамический датчик крутящего момента (фиг. 1) содержит роторный трансформатор 1 (фиг. 2), включающий в себя кольцевую статорную обмотку 2, кольцевую роторную обмотку 3 и установленные внутри два чашечных магнитопровода 4. Роторный трансформатор 1 снабжен защитным экраном 5. К кольцевой статорной обмотке 2 роторного трансформатора 1 подключен генератор высокой частоты 6, а к кольцевой роторной обмотке 3 роторного трансформатора 1 подключено выпрямительное устройство с интегрированным стабилизатором напряжения 7 (фиг. 1, фиг. 3). Выпрямительное устройство с интегрированным стабилизатором напряжения 7 соединено с модулем цифровой обработки и передачи сигнала крутящего момента 8 и тензометрическим мостом 9. Модуль цифровой обработки и передачи сигнала крутящего момента 8 с тензометрическим мостом 9 установлены на деформируемой рессоре 10 (фиг. 1). Деформируемая рессора 10 запрессована между левой полуосью 11 и правой полуосью 12. Прецизионные подшипники 13 установлены на левую полуось Ни правую полуось 12 и закреплены на подшипниковых щитах 14, 15, соединенных со станиной 16, при этом на подшипниковом щите 15 установлен модуль цифрового приема и измерения сигнала крутящего момента 17.
Заявленное устройство работает следующим образом: датчик крутящего момента устанавливают между приводным механизмом и валом, на котором необходимо произвести измерение крутящего момента. Под действием упругой деформации, установленный на деформируемой рессоре 10 тензометрический мост 9 выходит из балансного состояния и на диагонали тензометрического моста 9 появляется ненулевая разница потенциалов, которая является выходным сигналом тензометрического моста 9 и, одновременно, входным сигналом для модуля цифровой обработки и передачи сигнала крутящего момента 8. Выходной сигнал с тензометрического моста 9 подается на модуль цифровой обработки и передачи сигнала крутящего момента 8, в котором происходит фильтрация, усиление, дискретизация, буферизация, модуляция и передача сигнала крутящего момента на модуль цифрового приема и измерения сигнала крутящего момента 17 при помощи электромагнитных волн сверхвысокочастотного (СВЧ) диапазона, являющихся выходным сигналом модуля цифровой обработки и передачи сигнала крутящего момента 8, и, одновременно, входным сигналом для модуля цифрового приема и измерения сигнала крутящего момента 17. В модуле цифрового приема и измерения сигнала крутящего момента 17 происходит частотная селекция входного сигнала, усиление, буферизация и передача сигнала крутящего момента на внешнее регистрирующее устройство.
Для обеспечения электрической энергией вращающихся частей бесконтактного прецизионного динамического датчика крутящего момента, а именно тензометрического моста 9 и модуля цифровой обработки и передачи сигнала крутящего момента 8, используется роторный трансформатор 1. Входное напряжение от внешнего источника постоянного тока подается на генератор высокой частоты (ГВЧ) 6, где оно преобразуется в переменное напряжение высокой частоты. Далее это напряжение прикладывается к кольцевой статорной обмотке 2 роторного трансформатора 1. Под действием переменного напряжения высокой частоты в кольцевой статорной обмотке 2 роторного трансформатора 1, начинает протекать электрический ток, частота которого совпадает с частотой напряжения ГВЧ 6. Под действием тока высокой частоты создается магнитное поле, силовые линии которого замыкаются по чашечному магнитопроводу 4 и индуцируют электродвижущую силу (ЭДС) в кольцевой роторной обмотке 3 роторного трансформатора 1. Геометрическое расположение кольцевой статорной обмотки 2 и кольцевой роторной обмотки 3 (фиг. 2), обеспечивает минимальную индуктивность рассеяния, что приводит к повышению коэффициента связи между обмотками и, как следствие, повышению эффективности процесса бесконтактной передачи электрической энергии, а также снижению уровня электромагнитных шумов. Для снижения потоков рассеяния роторного трансформатора 1 применяется защитный экран 5. Индуцированная ЭДС в кольцевой роторной обмотке 3 роторного трансформатора 1 подается на выпрямительное устройство с интегрированным стабилизатором напряжения 7. Постоянное напряжение с выхода выпрямительного устройства с интегрированным стабилизатором напряжения 7 прикладывается к тензометрическому мосту 9 и модулю цифровой обработки и передачи сигнала крутящего момента 8.
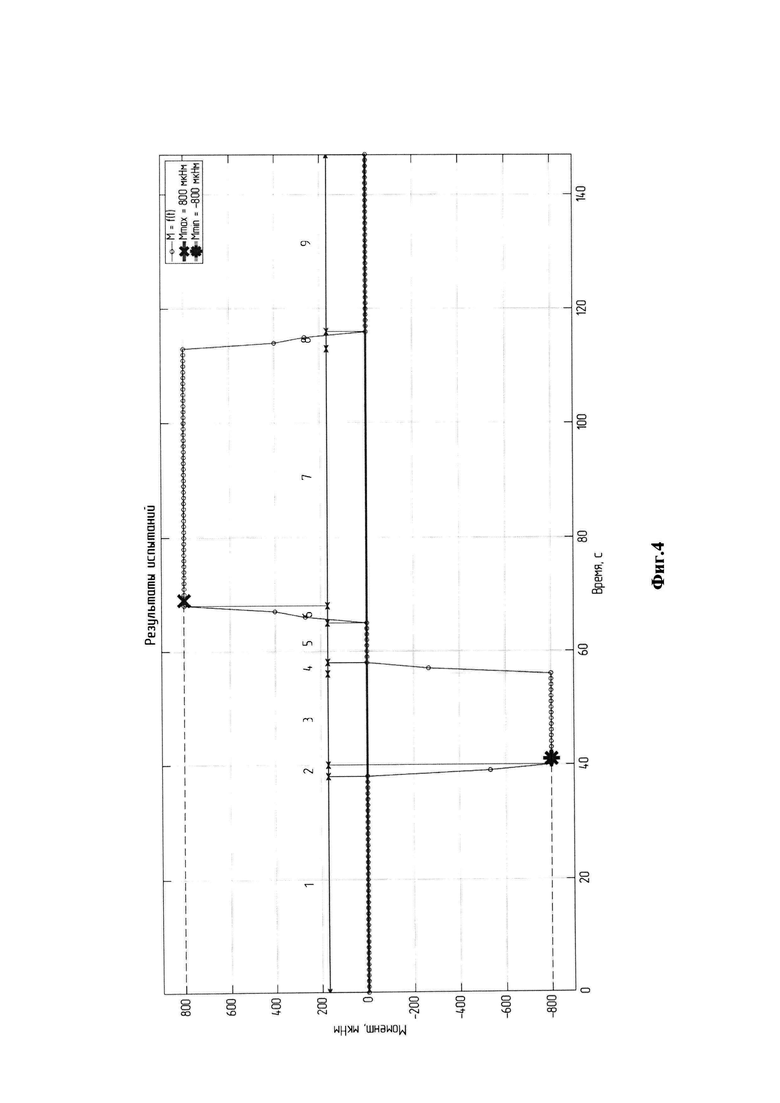
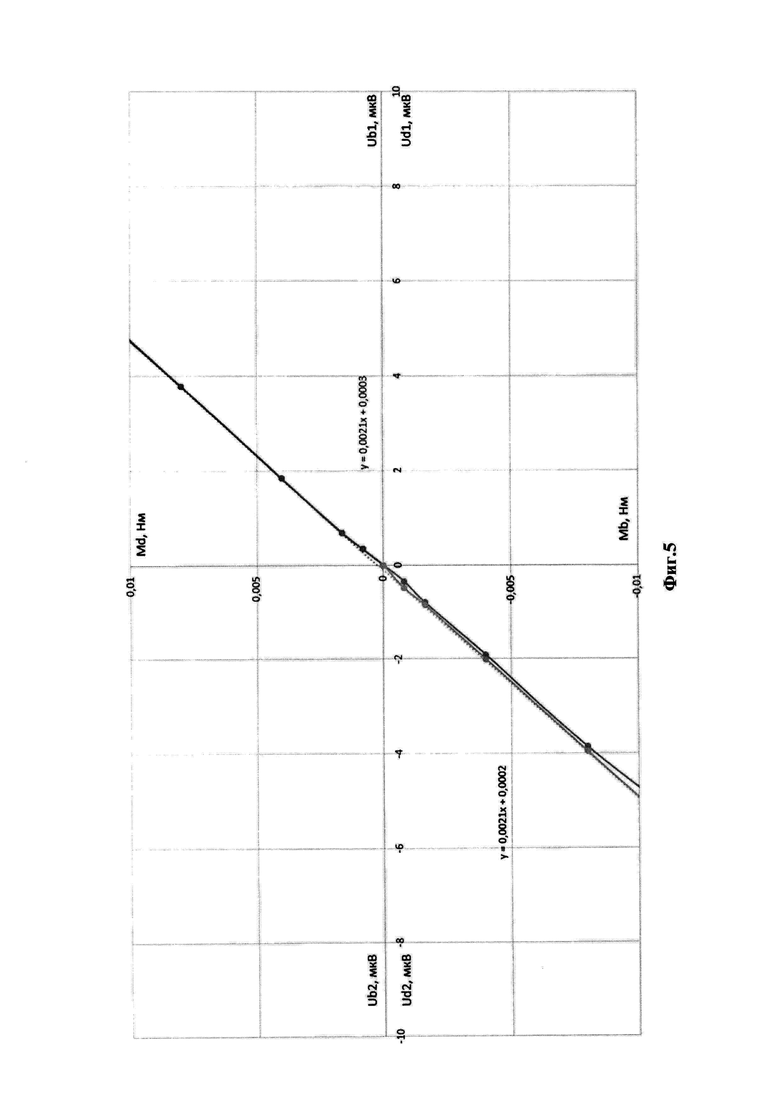
Для оценки динамических характеристик бесконтактного прецизионного динамического датчика крутящего момента разработана экспериментальная установка, позволяющая создавать крутящие моменты. Результаты испытаний представлены на фиг. 4, фиг. 5. На фиг. 4 выделены характерные интервалы. Для каждого интервала составлена таблица 1 с характеристиками:
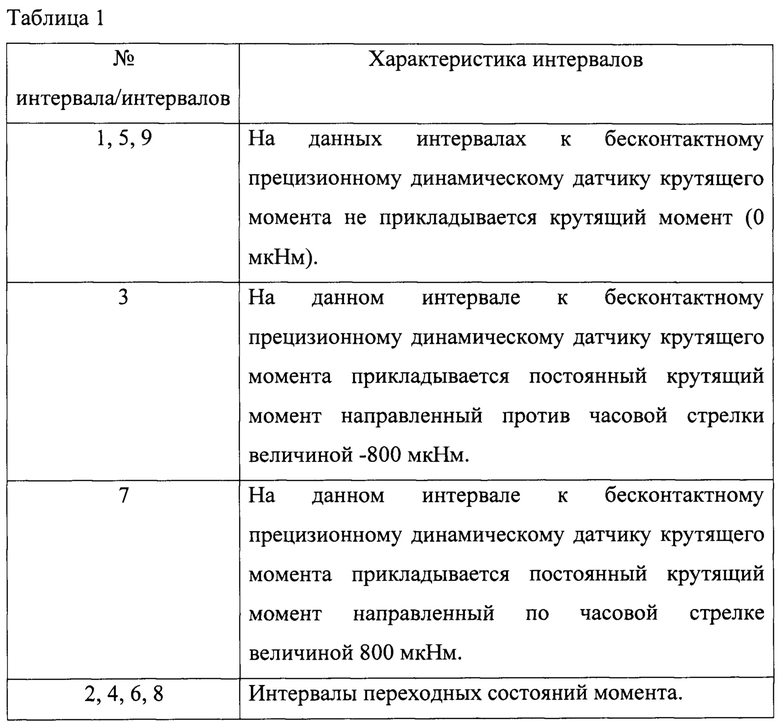
Анализируя полученные результаты испытаний, можно сделать следующие заключения (фиг. 4, фиг. 5):
1) При воздействии крутящего момента на рессору 10 бесконтактного прецизионного динамического датчика крутящего момента, рессора 10 возвращается в недеформированное состояние, наблюдается упругая деформация. Об этом свидетельствуют интервалы 5, 9 величина момента на которых остается равной моменту на интервале 1, после воздействия крутящих моментов (фиг. 4).
2) Наблюдается стабильность измерения величины крутящего момента. При воздействии одинаковых по модулю, но противоположных по направлению крутящих моментов, выходной сигнал датчика крутящего момента имеет симметричное отклонение относительно недеформированного состояния. Об этом свидетельствуют интервалы 3, 7 на протяжении которых действует постоянный крутящий момент равный по модулю 800 мкНм. Отклонение моментов на интервалах 3, 7 симметрично относительно интервалов 1, 5, 9 (фиг. 4).
3) Зависимость выходного сигнала является линейной функцией от крутящего момента в зонах упругой деформации (фиг. 5). Аппроксимирующая функция является линейной М=0.0021U+0.0003. Максимальное отклонение линейной функции от экспериментальных точек в окрестности нуля 0,1 мкНм.
4) На фиг. 4 отсутствуют шумовые сигналы, следовательно наблюдается стабильность измерения крутящего момента, а также, датчик крутящего момента обладает высокой степенью помехозащищенности. Об этом свидетельствуют все интервалы, на протяжении которых отсутствуют искажения сигнала момента.
Таким образом, заявляемое изобретение позволяет достичь высокой точности измерения благодаря снижению уровня электромагнитных шумов от работы роторного трансформатора, использованию частот информационного обмена выше полосы пропускания операционных усилителей, установленных в модуле цифровой обработки и передачи сигнала крутящего момента, что обеспечивает стабильность измерения величины крутящего момента.
Данный бесконтактный прецизионный динамический датчик крутящего момента может изготавливаться в промышленных масштабах и найдет применение в испытательных лабораториях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОКА ВОЗБУЖДЕНИЯ В БЕСЩЕТОЧНЫХ ЭЛЕКТРИЧЕСКИХ МАШИНАХ | 2008 |
|
RU2453981C2 |
| ПРИБОР ДЛЯ БЕСКОНТАКТНОГО МНОГОТОЧЕЧНОГО ТЕНЗОМЕТРИРОВАНИЯ НА ВРАЩАЮЩИХСЯ ДЕТАЛЯХ | 1965 |
|
SU175695A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ЗАКРУТКИ ВАЛА, ПЕРЕДАЮЩЕГО КРУТЯЩИЙ МОМЕНТ | 2013 |
|
RU2540938C1 |
| Датчик крутящего момента | 1982 |
|
SU1093923A1 |
| Гайковерт | 1976 |
|
SU682359A1 |
| Устройство для питания вращающихся тензорезистивных цепей | 1982 |
|
SU1081567A1 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2010 |
|
RU2438151C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ОДНОФАЗНОГО ЗАМЫКАНИЯ НА ЗЕМЛЮ В РАЗВЕТВЛЕННОЙ ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ, СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА МЕЖДУФАЗНОГО КОРОТКОГО ЗАМЫКАНИЯ В РАЗВЕТВЛЕННОЙ ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ И УСТРОЙСТВО КОНТРОЛЯ ТОКА И НАПРЯЖЕНИЯ ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2372624C1 |
| Устройство для защиты синхронного двигателя | 1972 |
|
SU729728A1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
Изобретение относится к приборостроительной технике, а именно к конструкции моментомеров, используемых для измерения крутящего момента на валу. В устройстве, содержащем ротор с размещенными на нем тензометрическим мостом, трансформатором с неподвижной обмоткой и обмоткой, выполненной с возможностью вращения, выпрямительное устройство с интегрированным стабилизатором напряжения, модуль измерения крутящего момента, трансформатор выполнен роторным, закрыт защитным экраном и состоит из двух чашечных магнитопроводов, установленных внутри, кольцевых статорной и роторной обмоток. При этом кольцевая статорная обмотка подключена к генератору высокой частоты, а кольцевая роторная обмотка подключена к выпрямительному устройству с интегрированным стабилизатором напряжения, подключенному к модулю цифровой обработки и передачи сигнала крутящего момента с тензометрическим мостом, которые установлены на деформируемой рессоре. Модуль измерения крутящего момента содержит модуль цифрового приема сигнала крутящего момента, установленный на подшипниковом щите. Технический результат заключается в повышении помехозащищенности и стабильности измерения величины крутящего момента. 5 ил., 1 табл. 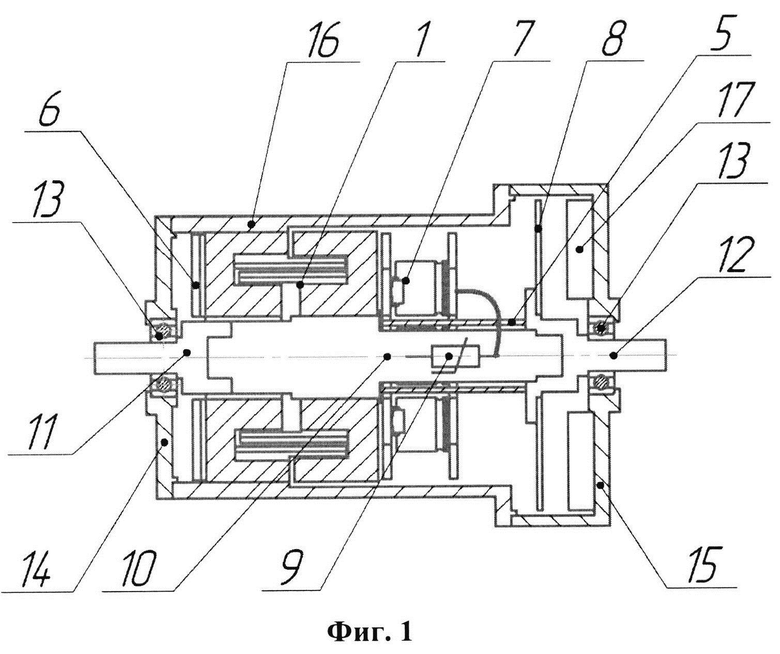
Датчик крутящего момента, включающий ротор с размещенными на нем тензометрическим мостом, трансформатором с неподвижной обмоткой и обмоткой, выполненной с возможностью вращения, выпрямительное устройство с интегрированным стабилизатором напряжения, модуль измерения крутящего момента, отличающийся тем, что трансформатор выполнен роторным, закрыт защитным экраном и состоит из двух чашечных магнитопроводов, установленных внутри, кольцевых статорной и роторной обмоток, причем кольцевая статорная обмотка подключена к генератору высокой частоты, а кольцевая роторная обмотка подключена к выпрямительному устройству с интегрированным стабилизатором напряжения, подключенному к модулю цифровой обработки и передачи сигнала крутящего момента с тензометрическим мостом, которые установлены на деформируемой рессоре, а модуль измерения крутящего момента содержит модуль цифрового приема сигнала крутящего момента, установленный на подшипниковом щите.
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА | 2014 |
|
RU2555189C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОД НАГРУЗКОЙ ВЫХОДНОГО НАПРЯЖЕНИЯ ВЫПРЯМИТЕЛЬНОЙ УСТАНОВКИ | 0 |
|
SU218985A1 |
| US 7424829 B2, 16.09.2008 | |||
| МАГНИТОУПРУГИЙ ДАТЧИК КРУТЯЩЕГО МОМЕНТА | 2012 |
|
RU2591587C2 |
| СИСТЕМА ДАТЧИКОВ ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА И ВАЛ С СИСТЕМОЙ ДАТЧИКОВ ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА | 2012 |
|
RU2563604C2 |

