Изобретение относится к горной промышленности и к геофизике, конкретно - к устройствам, позволяющим определять значения азимутальных и зенитных углов в глубоких скважинах при наклонно-направленном бурении нефтяных, газовых, геологоразведочных скважин.
Известен гироскопический инклинометр (А.с. 1002551, кл. E 21 B 47/02, Б N 9, 1983), содержащий корпус, трехстепенный гироскоп, два датчика углов поворотов, закрепленных на подвижной эксцентрической рамке, измерительный датчик угловой скорости, моментный двигатель, преобразовательный блок и два цифровых фазометра, причем датчик угловой скорости установлен на наружной рамке трехстепенного гироскопа так, что его ось чувствительности расположена перпендикулярно вектору кинетического момента трехстепенного гироскопа, его выход соединен с моментным двигателем, статор которого размещен на наружной рамке гироскопа, а ротор - на внутренней.
Недостатком данного инклинометра являются большие сложность конструкции и стоимость из-за необходимости применения двух прецизионных гироскопов - трехстепенного и двухстепенного.
Известен автономный гироскопический инклинометр (N 2541366, кл. E 21 B 42/022, 1985), содержащий закрепленные на корпусе зонда трехкомпонентный акселерометр, двухкомпонентное лазерное гироскопическое устройство с ортогональными осями чувствительности, перпендикулярными оси скважины, преобразователь и компьютер, алгоритм функционирования которого включает фильтр Калмана. Компьютер определяет координаты местоположения и углы ориентации зонда.
Недостатком данного устройства является высокая стоимость и низкая точность определения азимутального угла.
Известен инклинометр (А.с. 804822, кл. E 21 B 47/02, Б N 6, 1981), содержащий корпус, датчики магнитного поля, маятниковые кардановы подвесы и груз-эксцентрик, причем три ортогональных магнитометра установлены в наружной рамке с эксцентриком, обеспечивающим установку наружной рамки в апсидальной плоскости, а два других магнитометра установлены на двух маятниках, оси подвесов которых параллельны между собой и перпендикулярны плоскости эксцентрика, при этом ось чувствительности магнитометра, расположенного на верхнем маятнике, параллельна плечу маятника, а ось чувствительности магнитометра, укрепленного на нижнем маятнике, лежит в апсидальной плоскости и перпендикулярна плечу этого маятника.
Известен магнитометрический многоточечный инклинометр (ИММ) (Техническое описание и инструкция по эксплуатации инклинометра магнитометрического многоточечного ИММ 73 - 120/60. АЯЖ 1.000.018. ТО, М-во топлива и энергетики РФ, ассоциация "Нефтегазгеофизика" НПФ "Геофизика", г. Уфа, - 1990, 104 с.), который содержит корпус и чувствительный элемент, выполненный в виде немагнитной поплавковой камеры, опоры подвеса которой расположены по продольной оси корпуса инклинометра и которая имеет маятник, плечо которого перпендикулярно оси подвеса поплавковой камеры, на корпусе этой камеры с помощью опор подвеса установлены еще два немагнитных поплавка, оси подвесов которых перпендикулярны плоскости, включающей ось подвеса поплавковой камеры и плечо ее маятника, при этом поплавки имеют маятники, плечи которых перпендикулярны осям их подвесов, зазоры между поплавками и поплавковой камерой и корпусом заполнены поддерживающей жидкостью, верхний из маятников содержит синусно-косинусный вращающийся трансформатор, обеспечивающий возможность преобразования угла поворота верхнего поплавка, называемого зенитным, в электрические сигналы, пропорциональные его синусу и косинусу, а на нижнем поплавке установлены два магнитометра, измерительная ось первого из них параллельна оси подвеса этого поплавка, а измерительная ось второго магнитометра перпендикулярна оси подвеса этого поплавка и плечу его маятника. С помощью этих магнитометров измеряются компоненты вектора напряженности магнитного поля Земли, а следовательно, азимутальный угол.
Известен инклинометр (патент США N 3587176, кл. G 01 C 9/16, 1971), содержащий зонд, в котором размещены верхний маятник, корпус верхнего маятника, нижний маятник, корпус нижнего маятника, статор, ротор и вычислительный блок, при этом верхний маятник установлен над нижним маятником. Данное устройство является наиболее близким аналогом заявленному инклинометру.
В инклинометре по патенту США не удается максимально уменьшить диаметр при одновременном обеспечении больших величин маятниковостей у маятников, что необходимо при высокой точности измерения углов зенита и азимута.
Данный недостаток может быть значительно уменьшен путем такой установки двух маятников, при которой оси их подвесов параллельны оси зонда инклинометра, а трехкомпонентный магнитометр, не имеющий карданова подвеса, установить в зонде инклинометра. Как известно, диаметр маятника обычно значительно меньше его длины.
Задачей изобретения является снижение диаметра зонда инклинометра. Поставленная задача решается за счет того, что в инклинометр, содержащий зонд, в котором размещены верхний маятник, корпус верхнего маятника, нижний маятник, корпус нижнего маятника, статор, ротор и вычислительный блок, введены трехкомпонентный магнитометр, установленный на зонде, пружина для связи нижнего маятника с его корпусом, датчик угла, размещенный на оси нижнего маятника, и демпфер нижнего маятника, при этом верхний маятник свободно подвешен в своих опорах и имеет неограниченный угол поворота, на верхнем маятнике установлен ротор, а на корпусе верхнего маятника - статор синусно-косинусного вращающегося трансформатора, оси подвесов маятников соосны с продольной осью зонда, измерительная ось нижнего маятника, перпендикулярная его плечу и оси подвеса, совпадает с одной из поперечных осей зонда, причем выходы трехкомпонентного магнитометра, синусно-косинусного вращающегося трансформатора и датчика угла соединены с соответствующими входами вычислительного блока.
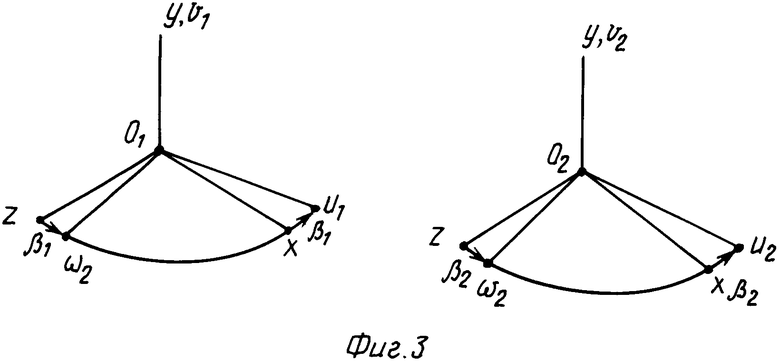
На фиг. 1 изображен инклинометр; на фиг. 2 представлены схемы поворотов координатных трехгранников; на фиг. 3 - углы поворотов β1 и β2 верхнего и нижнего маятников соответственно.
Инклинометр состоит из зонда 1, с которым связан правый ортогональный трехгранник OXYZ, причем OY - продольная ось, а OX и OZ - поперечные оси. Внутри зонда 1 установлен верхний маятник 2, ось подвеса 3 которого совпадает с продольной осью зонда 1. Корпус 4 верхнего маятника 2 закреплен на зонде 1. На подвесе 3 верхнего маятника 2 закреплен ротор 5, а на корпусе 4 - статор 6 датчика угла, выполненного в виде синусно-косинусного вращающегося трансформатора с соответствующими выходными обмотками 7 и 8. Плечо l1 верхнего маятника 2 направлено по оси OX и представляет собой расстояние от его центра масс до оси подвеса.
Под верхним маятником 2 (по направлению силы тяжести) расположен нижний маятник 9, причем ось его подвеса 10 совпадает с осью подвеса верхнего маятника 2. Нижний маятник 9 выполнен в виде акселерометра, например, с механической пружиной для связи нижнего маятника с его корпусом (В точных инклинометрах может быть применена "электрическая пружина", то есть может быть использован компенсационный принцип измерения). Это реализовано тем, что подвес 10 связан через посредство рычага 11 и пружин 12 с корпусом 13 маятника 9. В свою очередь, корпус 13 маятника 9 закреплен на зонде 1. Плечо l2 маятника 9 направлено вдоль оси OZ. На подвесе 10 маятника 9 размещен ротор 14, а на корпусе 13 маятника 9 - статор 15 датчика угла, включающего соответствующие выходные обмотки 16 и 17. В качестве датчика угла маятника 9 может быть применен либо синусно-косинусный вращающийся трансформатор, либо датчик индукционного типа. На подвесе 10 маятника 9 и на его корпусе 13 размещены элементы демпфера (не показаны). Конструктивно маятники выполняют, например, в виде поплавков с гидростатической разгрузкой опор шарикоподшипникового или другого типа. В маятниках 2 и 9 жидкость и поплавки выполняют роль демпферов. Маятниковость создается, например, за счет эксцентрического изготовления поплавка по отношению к цапфам поплавка (См., например, с. 22 - 23 книги Коновалова С.Ф. и др. Гироскопические системы. Проектирование гироскопических систем. Ч. III. - М.: Высшая школа, 1980, 128 с.).
Верхний маятник 2 свободно подвешен в своих опорах и имеет неограниченный угол поворота вокруг оси OY. Трехкомпонентный магнитометр 18 может быть индукционным прибором аналогично прибору ИД-6, лишенному карданова подвеса. Вычислитель 19 может быть выполнен на основе микропроцессора, например, 1821BM85, 1834BM86 или аналогичных. Номером 20 показана немагнитная обсадная труба скважины или стенка необсаженной скважины. Выходные обмотки 7 и 8 синусно-косинусного вращающегося трансформаторного датчика угла маятника 2, выходные обмотки 16 и 17 датчика угла маятника 9 и выходы магнитометра через блоки сопряжения (не показаны) соединены с вычислительным блоком 19, выходы которого через кабель соединены с потребителями на поверхности Земли.
Работает устройство при наличии зенитного угла  , угловых градусов, фиг. 2. На фиг. 2 изображены: 0ξηζ - географический правый ортогональный трехгранник, ось 0ξ которого направлена на север, а ось 0η - по вертикали в зенит; ψ,θ - углы азимута и зенита скважины, а γ - угол собственного вращения корпуса инклинометра l; g - ускорение силы тяжести; 0ξmηmζm - магнитогеографический трехгранник, ось 0ηm которого совпадает с осью 0η , а ось 0ξm направлена на север, составляя с осью 0ξ угол магнитного склонения Δψ; ϕ - широта местонахождения скважины;
, угловых градусов, фиг. 2. На фиг. 2 изображены: 0ξηζ - географический правый ортогональный трехгранник, ось 0ξ которого направлена на север, а ось 0η - по вертикали в зенит; ψ,θ - углы азимута и зенита скважины, а γ - угол собственного вращения корпуса инклинометра l; g - ускорение силы тяжести; 0ξmηmζm - магнитогеографический трехгранник, ось 0ηm которого совпадает с осью 0η , а ось 0ξm направлена на север, составляя с осью 0ξ угол магнитного склонения Δψ; ϕ - широта местонахождения скважины;  - компоненты вектора напряженности магнитного поля Земли. На фиг. 3 изображены повороты правых ортогональных трехгранников oi, ui, vi, wi (i = 1,2), связанных с маятниками 2 и 9 соответственно, на углы βi (i = 1,2). При этом угол β1 не ограничен, а угол β2 является малым.
- компоненты вектора напряженности магнитного поля Земли. На фиг. 3 изображены повороты правых ортогональных трехгранников oi, ui, vi, wi (i = 1,2), связанных с маятниками 2 и 9 соответственно, на углы βi (i = 1,2). При этом угол β1 не ограничен, а угол β2 является малым.
При наличии зенитного угла θ и угла собственного вращения γ момент силы от ускорения силы тяжести g установит плечо маятника 2 по линии действия проекции ускорения силы тяжести (в апсидальной плоскости), следовательно, проекция Wω1 ускорения силы тяжести g на ось 0ω1 равна нулю, т.е.
Wω1= Wzcosβi+Wxsinβi= 0 (1)
Из фиг. 2 следует, что проекции ускорения силы тяжести g на оси O1X и O1Z равны:
W1x= g sinθcosγ; W1z= g sinθsinγ (2)
Подставив (2) в (1), получаем:
tgβ1= -W1z/W1x= -tgγ; β1= -γ (3)
Этим показано, что угол поворота маятника 2 относительно зонда 1 равен по величине углу собственного вращения зонда, но с обратным знаком. Этот угол преобразуется синусно-косинусным вращающимся трансформаторным датчиком угла в электрические сигналы, пропорциональные sinβ1, cosβ1, , которые подаются в вычислительный блок 19.
В маятнике 9 происходит следующий процесс. Под действием момента силы от проекции ускорения g на ось O2U2 происходит поворот маятника 9 относительно зонда 1 на угол β2 до тех пор, пока этот момент не уравновесится моментом силы от пружины 12. В установившемся режиме имеем:
где
Kn - жесткость пружины; m2l2 - маятниковость нижнего маятника 9.
Угол β2 преобразуется датчиком угла маятника 9 в электрический сигнал, который подается в вычислительный блок 19. В вычислительном блоке 19 по алгоритму, полученному из (1) - (4) и имеющему вид
определяется зенитный угол θ . Сигналы углов θ и γ используются в вычислителе также для определения азимутального угла скважины по алгоритму: ,
,
где ψm - магнитный азимут зонда, Tx, Ty, Tz - сигналы трехкомпонентного магнитометра по осям OX, OY, OZ соответственно. Истинный, географический азимут, как следует из фиг. 2, определяется в вычислительном блоке 19 по алгоритму:
ψ = ψm+Δψ, (8)
где Δψ определяется из карты магнитных склонений.
Отметим, что при отсчете угла азимута по часовой стрелке знак угла ϕ нужно изменить на обратный.
Достоинством предложенного инклинометра является возможность значительного уменьшения его диаметра, что требуется для обследования скважин малого диаметра, а также устранение в верхнем маятнике и алгоритмическая компенсация погрешностей перекрестной связи в нижнем маятнике по алгоритму (6).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН | 2011 |
|
RU2459951C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |

Инклинометр предназначен для определения углов азимута и зенита обсаженных немагнитными трубами или необсаженных скважин. Инклинометр содержит зонд, в котором размещены верхний маятник, нижний маятник, статор, ротор и вычислительный блок. На зонде размещен трехкомпонентный магнитометр, имеется пружина для связи нижнего маятника с его корпусом. Датчик угла размещен на оси нижнего маятника, который содержит демпфер. Верхний маятник свободно подвешен в своих опорах и имеет неограниченный угол поворота. На верхнем маятнике установлен ротор. На корпусе верхнего маятника размещен статор синусно-косинусного вращающегося трансформатора. Оси подвесов маятников соосны с продольной осью зонда. Измерительная ось нижнего маятника, перпендикулярная его плечу и оси подвеса, совпадает с одной из поперечных осей зонда. Выходы трехкомпонентного магнитометра, синусно-косинусного вращающегося трансформатора и датчика угла соединены с соответствующими входами вычислительного блока. 3 ил.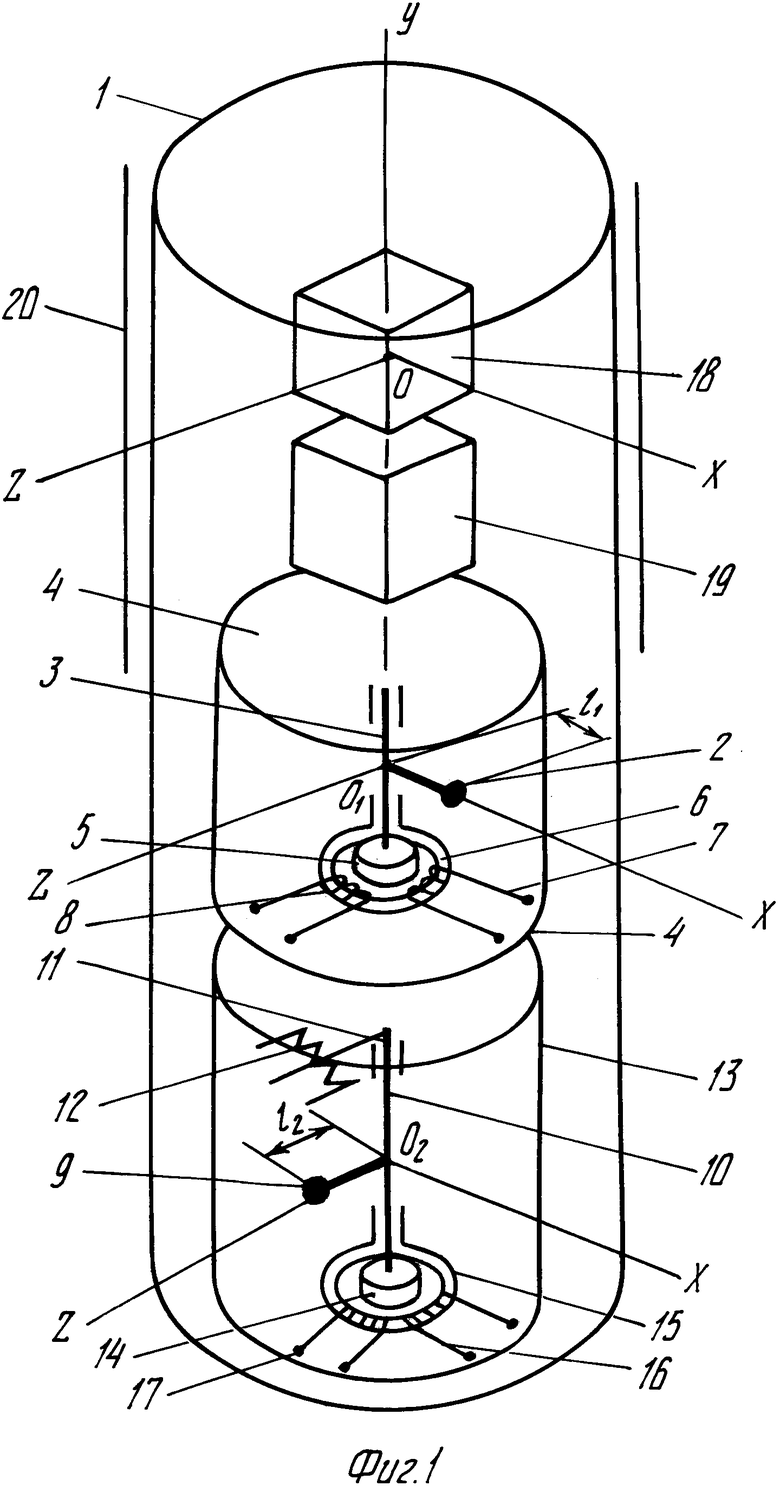
Инклинометр, содержащий зонд, в котором размещены верхний маятник, корпус верхнего маятника, нижний маятник, корпус нижнего маятника, статор, ротор и вычислительный блок, отличающийся тем, что введены трехкомпонентный магнитометр, установленный на зонде, пружина для связи нижнего маятника с его корпусом, датчик угла, размещенный на оси нижнего маятника, и демпфер нижнего маятника, при этом верхний маятник свободно подвешен в своих опорах и имеет неограниченный угол поворота, на верхнем маятнике установлен ротор, а на корпусе верхнего маятника - статор синусно-косинусного вращающегося трансформатора, оси подвесов маятников соосны с продольной осью зонда, измерительная ось нижнего маятника, перпендикулярная его плечу и оси подвеса, совпадает с одной из поперечных осей зонда, причем выходы трехкомпонентного магнитометра, синусно-косинусного вращающегося трансформатора и датчик угла соединены с соответствующими входами вычислительного блока.
| SU, авторское свидетельство, 804822, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| US, патент, 3587176, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
