(Л
КЗ
14)
Изобретение относится к подъемно- транспортному машиностроению, а именно к устройствам для подвода энергии к подвижным объектам и является усовершенствованием устройства по ав-т, св.№ 893818.
Цель изобретения - повьшение надежности устройства путем устранения заеданий и перекосов в кинематических парах.
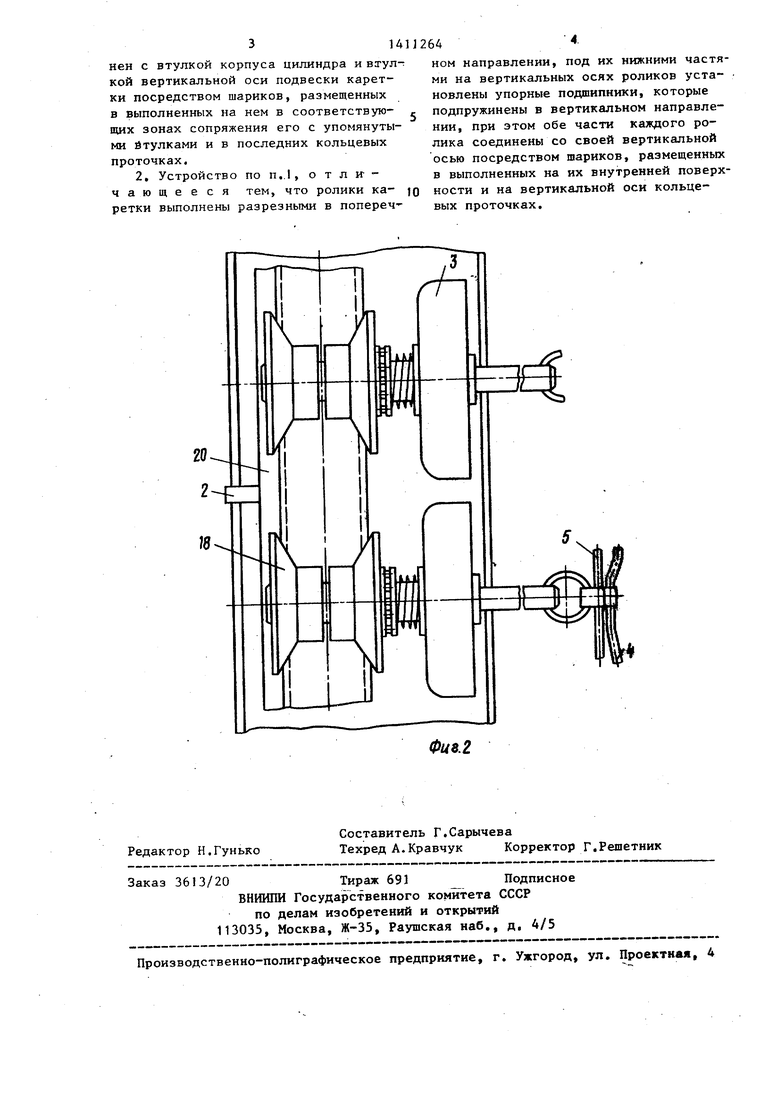
На фиг,1 изображено предлагаемое устройство, вид спереди; на фиг.2 - то же, вид сбоку (пове.рнуто) .
Устройство для подвода энергии к подвижному объекту содержит направляющую трубу 1, подвешенную на кронштейнах 2 вдоль пути подвижного объекта (не показан). Каретки 3 установлены на трубе 1 и несут гибкий энергоноситель 4, соединенный с подвижным объектом и источником питания (не показан). Все каретки 3 связаны между собой гибкой связью 5,
Подвеска 6 каретки 3 соединена с подвижным о бъ ектом кинематической связью, состоящей из,цилиндра 7 с втулкой В, через которую пропущен шток 9 с упорной шайбой 10, закрепленный на подвеске 6 каретки 3 с возмож - ностью поворота и перемещения относительно вертикальной оси. Шток 9 снабжен шарниром. 11 и кольцевыми проточками 12 и 13, В полости, образованные кольцевыми проточками 12 и J3 штоки 9 и соответствующими кольцевыми проточками 14 подвески 6 и 15 втулки 8, помещены шарики J6 и 17,- Ролики 18, установленные на вертикальных осях 19 каретки 3 по обе сторож. направляющей трубы 1, в верхней части которой расположена пластина 20, выполнены составными и крепятся на вертикальных -осях 9 с помощью шариков 21, размещенных в кольцевых полостях 22 и 23, образованных проточками осей 9 и проточками составных частей роликов 18..
Ниже составные части роликов 18 опираются на подшипники 24 и поджимаются к трубе 1 пружинами 25.
Устройство для подвода энергии к подвижному объекту работает следующим образом.
В начальной момент все каретки 3 собраны на участке направляющей трубы 1 у источника питания (не показан) . При движении от источника питания подвижный объект (не показан),
взаимодействуя через кинематическую связь с одной из крайних кареток 3, натягивает отрезок гибкой связи 5 и
через эту связь движение передается от него этой кареткой соседней каретке, заставляя их перемещаться по направляющей трубе .
В дальнейшем движение через участки гибкой связи 5 передается от каретки к каретке, которые поочередно отрываются от общего ряда у источника питания и перемещаются направляющей трубе на определенном расстоянии друг от друга.
Благодаря тому, что шток 9 связан шарниром 11 с подвеской 6 и может перемещаться относительно цилиндра 7, неточности монтажа устройства
(трубы 1 на пластинах 20, кареток 3 на трубе 1, подвесок 6 каретки 3 относительно цилиндра 7 и штока 9) компенсируются перемещениями (с поворотами и продольными смещениями) штока 9.
Все участки, в т.ч. и криволинейные, направляющей трубы 1 каретки 3 преодолевают плавно, без заеданий (установлены на вертикальных осях 19 подпружиненными), благодаря хорошему
схвату ими поверхности трубы 1 на любых ее участках.
Кроме того, при работе устройства снижается трение за счет применения в кинематических парах движения ш ариков.
При движении подвижного объекта к источнику питания отрезки гибкой связи 5 между каретками 3 провисают и располагаются между витками энергоносителя 4, при этом крайняя каретка 3 с которой через кинематическую связь взаимодействует подвижной объект на соседнюю каретку, перемещая ее до соприкосновения с другой кареткой, и, таким образом, весь ряд кареток 3 по направляющей трубе 1 движется в исходное положение к источнику питания,
Формула изобретения
1. Устройство для подвода энергии к подвижному объекту по авт.св. № 893818, отличающееся тем, что, с целью повышения надежности, шток цилиндра выполнен из отдельных частей, соединенных шарнирно посредством оси, расположенной параллельно направляющей трубе, и соеди3141
нен с втулкой корпуса цилиндра и втул-; кой вертикальной оси подвески каретки посредством шариков, размещенных в выполненных на нем в соответствую- , щих зонах сопряжения его с упомянутыми йтулками и в последних кольцевых проточках,
2, Устройство по п,.1, о т л к - чающееся тем, что ролики ка- JQ ретки выполнены разрезными в попереч64
ном направлении, под их нижними частями на вертикальных осях роликов установлены упорные подшипники, которые подпружинены в вертикальном направлении, при этом обе части каждого ролика соединены со своей вертикальной осью посредством шариков, размещенных в выполненных на их внутренней поверхности и на вертикальной оси кольцевых проточках.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подвода энергии к подвижному объекту | 1986 |
|
SU1404443A1 |
| Устройство для подвода энергии к подвижному объекту | 1980 |
|
SU893818A1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2009 |
|
RU2428327C1 |
| Устройство для подвода энергии к подвижному объекту | 1988 |
|
SU1574530A1 |
| Устройство для подвода энергии к напольному транспорту | 1990 |
|
SU1818653A1 |
| Устройство для подвешивания и перемещения гибких энергоносителей | 1983 |
|
SU1145399A1 |
| УСТРОЙСТВО ПОДВОДА ЭНЕРГИИ К ПОДВИЖНОМУ ОБЪЕКТУ | 1992 |
|
RU2034390C1 |
| УСТРОЙСТВО ДЛЯ СЪЕМА С ПРИЕМНОГО СТОЛА ПРЕССА И УКЛАДКИ В СТОПУ ОТФОРМОВАННЫХ ИЗДЕЛИЙ | 1995 |
|
RU2078688C1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРИЧЕСКОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2194630C2 |
| Подвесной конвейер | 1979 |
|
SU812665A1 |
Изобретение относится к подъемно-транспортному машино строению, а именно к устройствам для подвода энергии к подвижным объектам, преимущественно к аэтоматическим тележкам. Цель изобретения г повьшгение надежности устройства. Для этого шток 9 цилиндра снабжен шарниром 1J, расположенным в вертикальной плоскости, и кольцевыми проточками 12 и 13 с размещенными в них и в соответствующих кольцевых проточках 14 подвески 6 каретки и втулки 8 цилиндра шарнирами 16 и 17. Ролики 18 выполнены составными и крепятся на осях 19 с помощью шариков 21, размещенных в соот- ветствующих кольцевых плоскостях 22 и 23. I з.п.ф-лы. 2 ил.
Фцг.2
| Устройство для подвода энергии к подвижному объекту | 1980 |
|
SU893818A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
