UiAtosoSame SSfps
шлюзоВат/е 3m- s
ftS I Cfi mjinaf,
1вж
00
а
114
Изобретение относится к управлению судоходными шлюзами, в частности к устройствам для управления режимом наполнения камер многоступенчатого шлюза.
Цель изобретения - повьшение надежности работы устройстваS исключение простоев шлюза и сокращение времени шлюзования судов,
На чертеже показана схема предлагаемого устройства.
Устройствосодержит шесть приводных электродвигателей 1 Л- 6, имеющих преобразовательные приспособле-- НИН, подключенных через включатели 2.1-2.6 и 3.1-3.6 соответственно процессам шлюзования судов вверх или вниз к сборным шинам 4 и З, к которым
20
через включатели 6.1-6.6 и 7..6 подключаются в том же соответствии силовые регулируемые установки 8.1- 8,6, управляемые каждая своим блоком 9.1-9.6 управления и центральным пультом 10 управления, включающим управ- 25 ляющую ЭВМ.
Сборные электрические шины 4 и 5, вьтолнены с разъединителями 11„1- 11.5. Устройство имеет следующие основные связи: электрические шины сети п питаний с помощью силовых проводников 12.1-12.6, содержащих автоматические выключатели 13.1-13.6, подключены к силовым установкам 8.1-8. помощью электрических проводников 14.1-14.6 Питание осуществляется подключением сети питания к устройству. Сило вые установки 8.1-8,6 получают питание по проводникам 12.1-12.6, содержа щим автоматические выключатели 13.1- 13.6. При этом для целей профилактики, ремонта, наладки любой из автома тических выключателей или несколько из них (не более 5) могут быть выклю чены. От сети питания получите питан также центральный пульт 10 управлени по электрическому проводнику 15, а блоки 9.1-9.6 управления - по электр ческим проводникам 14.1-14.6.
При шлюзовании вв-ерх одиночного судна или группы судов, шлюзуемых одновременно, с центрального пульта 10 управления подается команда на блок 9.1 управления на шлюзоваьше вверх и номер программы наполнения камер (при программном регулировании блок 9.1 управления по каналу 23.1 включает включатели 2.1 электродвига теля 1о1 первого нижнего , затвора ниж ней камеры многоступенчатого шлюза). По команде с блока 9„1 управления одновременно по встречно-параллельно связи 16.1 передается команда на вкл
к блокам 9.1-9.4- управления,с помощью 35 чение силовой установки 8.1 и, если
1369
0
5
0
5
п
технологического процесса шгпочонания соответственно вверх или вниз.Силовые линии на схеме показаны жирными линиями ,
Устройство работает следующим образом.
Питание осуществляется подключением сети питания к устройству. Силовые установки 8.1-8,6 получают питание по проводникам 12.1-12.6, содержащим автоматические выключатели 13.1- 13.6. При этом для целей профилактики, ремонта, наладки любой из автоматических выключателей или несколько из них (не более 5) могут быть выключены. От сети питания получите питание также центральный пульт 10 управления по электрическому проводнику 15, а блоки 9.1-9.6 управления - по электрическим проводникам 14.1-14.6.
При шлюзовании вв-ерх одиночного судна или группы судов, шлюзуемых одновременно, с центрального пульта 10 управления подается команда на блок 9.1 управления на шлюзоваьше вверх и номер программы наполнения камер (при программном регулировании блок 9.1 управления по каналу 23.1 включает включатели 2.1 электродвигателя 1о1 первого нижнего , затвора нижней камеры многоступенчатого шлюза). По команде с блока 9„1 управления одновременно по встречно-параллельной связи 16.1 передается команда на вклю-1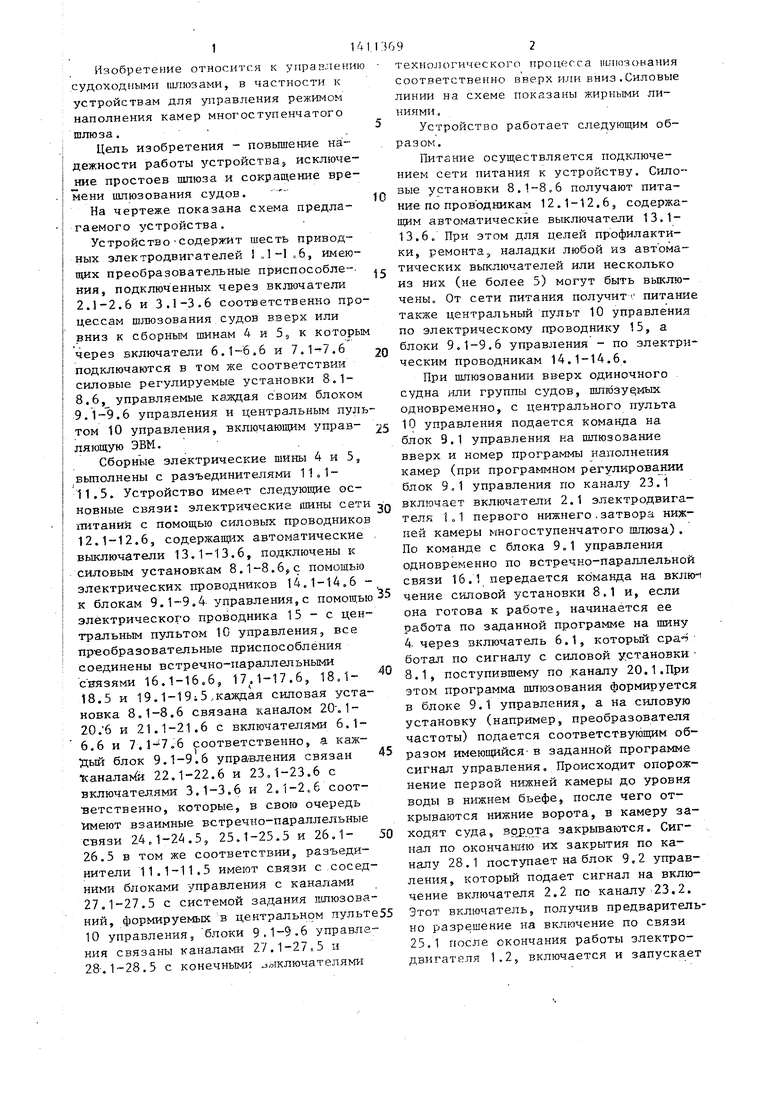
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для наполнения камеры шлюза | 1985 |
|
SU1291675A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ СУДОХОДНОГО ШЛЮЗА | 2016 |
|
RU2614534C1 |
| Устройство для наполнения камеры шлюза | 1989 |
|
SU1730349A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ СУДОХОДНОГО ШЛЮЗА | 2016 |
|
RU2628120C1 |
| МНОГОУРОВНЕВАЯ ОТКАЗОУСТОЙЧИВАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБОРУДОВАНИЕМ СУДОХОДНОГО ГИДРОТЕХНИЧЕСКОГО СООРУЖЕНИЯ | 2014 |
|
RU2565019C1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| СИСТЕМА ЭЛЕКТРИЧЕСКОГО ПИТАНИЯ ДЛЯ ПОСТАНОВКИ ЭЛЕКТРОВОЗОВ НА РЕМОНТНУЮ ПОЗИЦИИЮ | 2002 |
|
RU2229989C1 |
| Способ управления гидротехническим затвором при подаче воды в шлюз и устройство для его осуществления | 1988 |
|
SU1617085A1 |
| УСТРОЙСТВО ДЛЯ СТОЯНКИ СУДОВ В КАМЕРЕ ШЛЮЗА | 2024 |
|
RU2822933C1 |
| Устройство автоматического управления судоходным однокамерным шлюзом | 1990 |
|
SU1745816A1 |
Изобретение относится к управлению судоходными шлюзами, в частности к устройствам для управления режимом наполнения камер многоступенчатох о шлюза. Цель из-обретения позволяет повысить надежность работы системы, исключить простои Ешюзэ к сократить время шлюзования судов. Устройство i содержит силовые регулируемые ус ганс; - ки с электродвигателями 1.1-1.6, .электрические шины 4 и 5 с разъединителями 11.1-11.5, включатели 2.Т-2.6,блоки управления 9,1-9.6 силовыми установками 8.1-8.6 и центральный пульт управления 10. Электродвигатели затворов получают питание от силовых упг равляемых установок чере.з включателгЕ 2,1-2.6 ил л 3. 1-3.6, подключенные соответственно к шина:; или . с, разъединителями 11.1-11.5. Управленг силовыми установками 8,1-8,6 ocvaec i-- вляется с центрального поста управления через блоки угравления 9,, соединенные ме;вду собой вс гр чло-пг- р алл ел ь н о и с в к л юч а т ел лк 2.1-2.6 и 3.1-3,6 и разъединителями 11,1-11.5 К С1-ШОВЫМ установкам 8.1-8.6 подключены включатели 6,1-6.6. 1 ил. л ш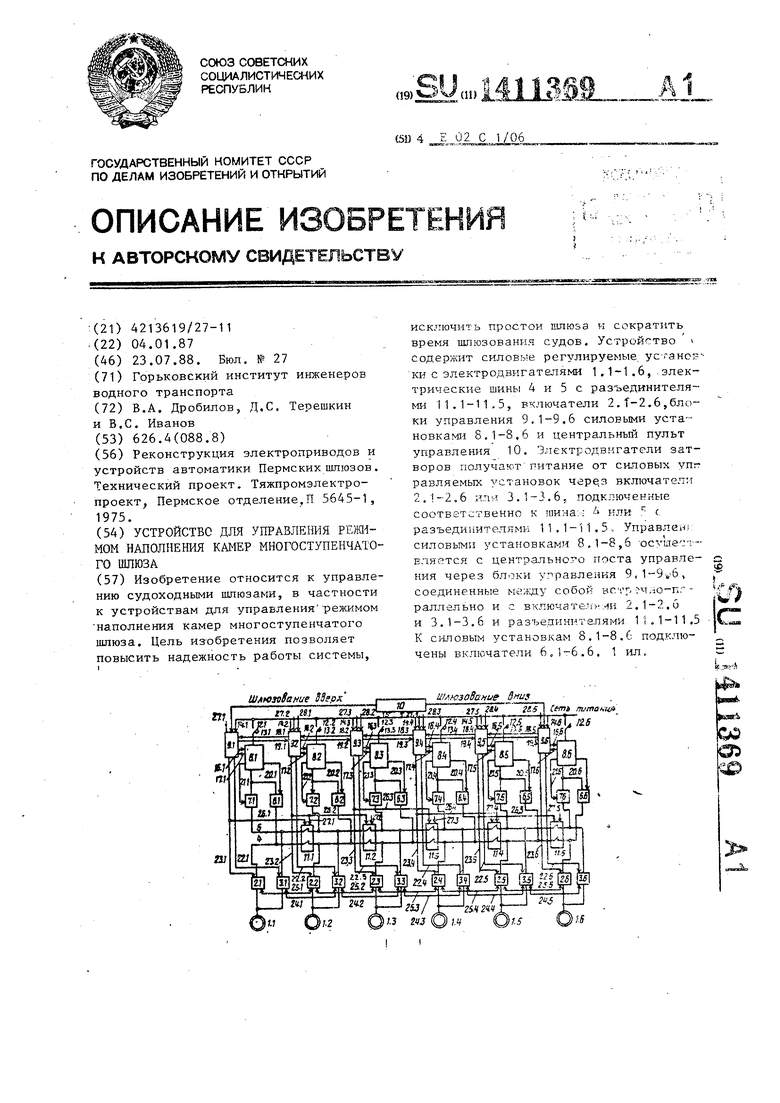
электрического проводника 15 - с цен тральным пультом 10 управления, все пр-еобразовательные приспособления соединены встречно-параллельными
она готова к раб.отез начинается ее работа по заданной программе на шину 4. через включатель 6.1, который ера ботал по сигналу с силовой установки
с яязями 16.1-16,6, 17,1-17.6, 18,1- 8.1, поступившему по каналу 20,1,При
45
этом программа шлюзования формируется в блоке 9.1 управления, а на силовую установку (например, преобразователя частоты) подается соответствующим образом имеющийся в заданной программе сигнал управления, Происходит опорожнение первой нижней камеры до уровня воды в нижнем бьефе, после чего открываются нижние ворота, в камеру заходят суда, закрываются. Сиг- пал по окончан -1ю их закрытия по каналу 28.1 поступает на блок 9,2 управления, который подает сигнал на включение включателя 2,2 по каналу-23,2. Этот включатель, получив предваритель но разрешение на включение по связи 25.1 после окончания работы злектро- двигате.ля 1.2, включается и запускает
она готова к раб.отез начинается ее работа по заданной программе на шину 4. через включатель 6.1, который ера ботал по сигналу с силовой установки
5
0 5
этом программа шлюзования формируется в блоке 9.1 управления, а на силовую установку (например, преобразователя частоты) подается соответствующим образом имеющийся в заданной программе сигнал управления, Происходит опорожнение первой нижней камеры до уровня воды в нижнем бьефе, после чего открываются нижние ворота, в камеру заходят суда, закрываются. Сиг- .. пал по окончан -1ю их закрытия по каналу 28.1 поступает на блок 9,2 управления, который подает сигнал на включение включателя 2,2 по каналу-23,2. Этот включатель, получив предварительно разрешение на включение по связи 25.1 после окончания работы злектро- двигате.ля 1.2, включается и запускает
3 14
двигатель 1,2 перепускных клинкетов вторьк ворот.
По той же самой програьше работает силовая установка 8,1 на двигатель 1,2, питание,при этом подается также по шине 4, Система блокировок (не показана) запрещает включение любой последующей установки (по направлению шлюзования), если работает предыдущая силковая установка. Поэтоьгу последняя сопровождает шлюзование судка или группы судов до самого верха при последовательном включении по команде сигналов с конечных выключателей (каналов 28.1-28.5) остальных двигателей 1.3-1.6 приводов перепускных ворот камер пшюза. Порядок передачи сигналов и включение аппаратов остается одним и тем же до самой верхней камеры. По окончании шлюзования через систему сигнализации (не показана) подается команда на окончание процесса шлюзования.
Если силовая установка 8.1 неисправна или находится на профилактике, по встречно-параллельным связям 17.1 она дает отказ блоку 9.1 управления, который, в свою очередь,передает комавду .на шлюзование вверх и адрес программы шлюзования блоку 9.2, который по каналу 16.2 вьтолняет включение силовой установки 8.2, Однако при этом включен двигатель 1,2, так как он получил сигнал на включение от блока 9.2 управления независимо от состояния силовой установки 8, 1 Исправная установка 8.2 и в этом случае сопровождает шлюзование судов до самого верхнего бьефа. В случае ее неисправности поиск исправной установки продолжается до первой по направлению шлюзования исправной установки. Включение двигателей 1.1-1.6 производится последовательно при калии сигнала конечного вьжлючателя от закрытия верхней предьщущей камеры и при снятии запре- та (по встречно-параллельным связям 24,1-24,5) на включение двигателя затворов последующих ворот.
Система работает аналргич1 р и при шлюзовании судна или группы одновременно юпюзующихсясудов вниз и адрес программы подается на блок 9.6 управления:. При этом последовательно cpa-s батьгоают включатели 7,6-7.1 и 3.6- 3.1, связанные с шиной 5, От конечных выключателей закрытых верхних ворот поступают сигналы на блоки 9,5-9.1
9
управления чер ез связи 27.5-27,1. Связь блоков 9.1-9,6 управления осуществляется по связям 18.5--18 ,1 . При этом достаточно одной из шести исправной силовой установки, чтобы шлюз работал бесперебойно.
При наличии большого количества судов, например в нижнем бьефе, последующее вшюзование судна или группы
судов может начинаться, не ; дожидаясь
окончания шлюзования вверх предьщущего судна или группы судов. При этом
по правилам шлюзования могут одновременно работать перепускные затворы ворот, расположенных один от другого на три камеры, т,е, в шестикамерном шлюзе могут в одном направлении шлю- , зоваться максимум три группы судов,
в пятикамерном - только две группы Судов и т,д. Для выполнения последующего шлюзования, например вверх, при незавершении предыдущего шлюзования с центрального пульта 10 управления.
подается в обычном порядке команда на блок 9,1 управления, на шлюзование вверх . Система блокировки или ЭВМ пропускает эту команду, если количество свободных камер по направлению
шлюзования соответствует технологии
шлюзования. Для возможности одновременных шлюзований вверх или вниз на шннах 4 и 5 предусмотрены разъедй- нители 11,,5. На каждое разъединительное устройство поступает два
сигнала, один из которых (сг;язи
26,1-26,5) снимает запре- по встречно- параллельным связями на отключение, запрет снимается от соседнего работающего блока управления сверху или снизу в зависимости от направления шлюзования. Второй сигнал формируется центральным пультом управления (ЭВМ или системой релейной логики) ,в . ТОМ .случае, если дана команда на одновременное шлюзование. Команда и программа шлюзования осуществляются исправной силовой установкой из rpyn-j пы, осуществляющей последующее шлюзование, В этом случае для безотказной работы шлюза необходимы по крайней мере две исправные силовые уста-- новки по одной в каждой из указанных групп. Одновременно с перемещением судна или группы судов по направлению шлюзования производится чередование разъединителей в соответствии с появлением двух сигналов на очередном по ходу шлюзования. Чередование рабо
51411369
двигателей 1.1-1.6, переключающих ртройств, блоков управления осущест- .|1яется аналогично описанному вьше,
ни ри те эт пр ны об не со ры ле ны вк е ВО бл ча ме бл св ха ро пу
нр только по двум группам этих аппа- p.iTOB, сопровождающих и обеспечиваю- nflix шлюзования в одном направлении.
Ф
орму-ла изобретения
Устройство для управления режимом наполнения камер многоступенчатого шлюза, содержащее центральный пульт управления и технологические механиз- M;ji перемещения затворов с электропри- вэдами наполнения камер, имеющими преобразовательные приспособления с ик двигателями, блоками управления
двумя шинами, а также включатели конечные выключатели, о т л и ч а щ е е с я тем, что, с целью повы- ния надежности работы устройства.
и
ю
ш
и)сключения простоев шлюза и сокраще
ния времени шлюзования судов, электрические шины выполнены с разъединителями между соседними приводами,при этом включатели и преобразовательные приспособления снабжены дополнительными связями между собой, а все преобразовательные приспособления соединены встречно-параллельными связями со своими блоками управления, которые, в свою очередь, встречно-параллельно связаны между собой с поочередным их соединением, при этом связи с включателями электродвигателей при- ВОДОВ также соединены, кроме крайних блоков управления, с конечными выключателями от соседних механизмов перемещения затворов, а каждый крайний блок управления выполнен с одной связью с конечными выключателями механизмов перемещения соседних затворов и с одной связью с центральным пультом управления.
| Реконструкция электроприводов и устройств автоматики Пермских шлюзов | |||
| Технический проект | |||
| Тяжпромэлектро- проект, Пермское отделение,П 5645-1, 1975. |
