Предлагаемое изобретение относится к области эксплуатации водного транспорта, а именно к техническим средствам для организации процесса шлюзования судов. Устройство предназначено для удержания судов в заданной точке в камерах шлюзов и направлено на обеспечение безопасной фиксации положения надводных судов, в том числе безэкипажных или автономных, у стенки камеры во время их шлюзования без использования швартовных устройств.
Руководящим документом, определяющим регламент движения и прохода в указанных судопропускных сооружениях, являются «Правила пропуска судов через шлюзы внутренних водных путей» (далее: правил судопропуска). Согласно принятому регламенту процесс шлюзования судов в камерах шлюзов состоит из операций, часть которых выполняется на шлюзе (открытие и закрытие ворот, подъем и опускание затворов водопроводных галерей), а часть - на судне (вход в шлюз и выход из него, швартовка и отшвартовка). Всеми операциями по работе оборудования на шлюзе управляет диспетчер шлюза, в свою очередь, капитан шлюзующегося судна выполняет распоряжения диспетчера. На этапе подхода к шлюзу диспетчер по радиосвязи получает от капитана информацию о типе судна, осадке и дает разрешение на вход в шлюз и, основываясь на этих данных, принимает решение о месте швартовки судна в камере и интенсивности шлюзования. Интенсивность шлюзования обеспечивается скоростью и режимом подъема затворов наполнения или опорожнения. Режим подъема (равномерный, разноскоростной или с остановками) устанавливают по результатам лабораторных и/или натурных испытаний шлюза. Исходя из практики имеется несколько запрограммированных режимов: для порожней камеры, для малых судов, для крупных судов. Также у диспетчера с пульта управления шлюзом есть возможность в ручном режиме выполнить остановку затворов в любой момент времени. В свою очередь режим подъема затворов оказывает прямое влияние на величину силового, гидродинамического воздействия потока воды на шлюзующееся судно. Согласно СП 101.13330.2023 сила воздействия на судно от потока воды не должна превышать допустимую силу, установленную для расчетного судна, т.е. судна наибольшего водоизмещения в полной осадке. Гидродинамическая сила воздействия на судно компенсируется силой натяжения в швартовых тросах, которыми судно пришвартовано при шлюзовании. Именно условия не превышения разрывающего усилия в швартовых и является лимитирующим интенсивность наполнения, опорожнения камеры шлюза.
Швартовка судов в камерах шлюза обычно производится с помощью специальных швартовочных устройств: неподвижных крюков, наглухо укрепленных в стенках камер, причальных тумб, стационарных или плавучих рымов и др. При этом основная задача судоводителя сводится к тому, чтобы подвести судно к швартовному устройству на такое расстояние, чтобы вахтенные матросы могли руками или багром набросить огоны тросов на гаки плавучих рымов с носовой и кормовой частей судна. Для этого судно должно быть полностью остановлено в тот момент, когда кнехты судна окажутся напротив гаков плавучих рымов. В соответствии с правилами безопасности труда матросов со швартовными тросами инерция движения судна вперед или назад не должна сдерживаться креплением швартовных тросов на кнехтах. Если судно сразу не удалось ошвартовать на два плавучих рыма, сначала подают и закрепляют носовой швартов, а затем при работе винтов враздрай подводят к стенке и учаливают кормовую часть. При наполнении и опорожнении камеры шлюза на ошвартованные в ней суда действуют гидродинамические силы, создаваемые при поступлении и вытекании значительного объема воды. Усилие, возникающее в результате натяжения швартовных тросов, зависит от водоизмещения судна, горизонтальных и вертикальных углов наклона швартовых.
Однако в некоторых случаях швартовка судов и при наличии указанных средств бывает затруднена (при обледенении стенок камеры и плавучих, швартовных устройств) или вовсе небезопасна. Особенно это касается швартовки в шлюзах судов безэкипажного типа.
Известен способ швартовки судна у причальной стенки по патенту RU 2747521, опубл. 06.05.2021, для реализации которого используются спутниковые навигационные системы. Система швартовки судна включает в себя: приемник спутниковой навигационной системы, рулевой привод, носовое подруливающее устройство, датчик руля, датчик тяги, блок программного управления, датчик угловой скорости и вычислителя, в который вводят из приемника спутниковых навигационных систем сигналы координат судна, скорость хода судна, производную скорости хода судна и путевой угол, из датчика руля - сигнал угла руля, из датчика угловой скорости - сигнал угловой скорости и из датчика тяги - сигнал тяги, дополнительно используют радары и регулятор оборотов гребного винта.
Недостатком данного способа является невозможность использования спутниковой навигационной системы для определения положения судна в камере во время шлюзования, когда судно находится внизу камеры.
Известна система причаливания надводных объектов по патенту RU 2121698, опубл. 10.11.1998, в которую входят два реперных пункта опорной базы причаливания, на каждом из которых установлены последовательно соединенные приемник радиосигналов, дешифратор радиосигналов, формирователь акустического сигнала и передатчик акустического сигнала. Кроме того, система содержит расположенные на объекте причаливания два приемника акустического сигнала, соединенные с измерителями дальности, формирователь радиосигналов и передатчик радиосигналов, вычислитель параметров причаливания и блок индикации, причем приемники акустических сигналов расположены на реперных пунктах базы объекта причаливания.
Недостатком системы является ее применимость в узком спектре задач только по определению положения судна относительно точек швартовки. В данной системе отсутствуют элементы управления судном и оборудованием шлюза, необходимые для реализации автоматического шлюзования безэкипажных судов.
Известен способ швартовки судна с помощью лазерной системы по патенту RU 2613465, опубл. 16.03.2017, заключающийся в том, что перед началом швартовочной операции на верхней палубе судна в ее носовой и кормовой оконечностях устанавливают по одному лазерному измерителю, снабженному датчиком угла наклона лазерного луча, при этом каждый из данных лазерных измерителей встраивают в крепежное устройство, предварительно установленное непосредственно на фальшборте верхней палубы каждой из оконечностей судна, подводят судно к объекту швартовки, до сближения с ним передают на капитанский мостик судна информацию о расстоянии до данного объекта швартовки носовой и кормовой оконечности борта судна, которую используют при управлении судном для выполнения швартовочной операции.
Недостатком способа является возможность его использования только для управления судна в ручном режиме. Также в этой системе отсутствуют элементы управления судном и оборудованием шлюза, необходимые для реализации автоматического шлюзования безэкипажных судов.
Известно швартовное устройство, располагающееся в камере шлюза и закрепленное на плавучем рыму (А.С. SU 1402639 A1, МПК E 02B 3/26, опубл. 15.06.1986). Устройство управляется диспетчером шлюза и механически фиксирует судно подводным вакуум-присосом, соединенным силовыми тросами с плавучим рымом. В режиме ожидания оно полностью находится в нише стены камеры шлюза. В рабочее положение, соответствующее укрепленному положению на корпусе судна, приводится системой шарнирно-рычажного механизма, перемещающего вакуум-присос к борту судна и обратно, и вакуум-насоса, обеспечивающего создание необходимой величины вакуума для фиксации присоса на корпусе судна.
Недостатками аналога является: ручное управление через диспетчера шлюза и невозможность использования при отрицательных температурах воздуха из-за обмерзания элементов конструкции плавучего рыма.
Известно швартовное устройство по пат. RU № 221649, МПК Е02В 3/20, опубл. 15.11.2023, которое, так же как вышеописанный аналог, закреплено на плавучем рыму. Устройство может управляться как в ручном, так и в автоматическом режиме, при этом автоматическое управление обеспечивает блок управления, состоящий из: АИС-транспондера (автоматической идентификационной системы), RTK-базовой станции (Real Time Kinematic на основе приемника спутниковой навигации GPS/ГЛОНАСС, радиомодема УКВ, предназначенного для беспроводной передачи данных от RTK-базовой станции, и ЭВМ, выход которой подсоединен через управляемое реле к пневмоприводу вакуум-насоса. Механическая фиксация судна осуществляется надводным вакуум-присосом, состоящим из трех контактных площадок с расположенными на них соплами-присосами, соединенным силовыми тросами с плавучим рымом. В режиме ожидания устройство находится в нише стены камеры шлюза, в рабочее положение приводится системой шарнирно-рычажного механизма, перемещающего вакуум-присос к борту судна и обратно, и вакуум-насоса, обеспечивающего создание необходимой величины вакуума для фиксации присоса на корпусе судна.
Указанный аналог является наиболее близким по назначению и технической сущности (прототипом) заявленного устройства. Недостатками его является наличие специального швартовного устройства, расположенного в камере шлюза и закрепленного на плавучем рыму, которое требует постоянного технического обслуживания механической части и постоянного контроля за фактическими параметрами усилия удержания судна в фиксированном положении. Кроме того, эксплуатация прототипа при минусовых температурах в условиях активного образования льда на плавучем рыме и на направляющих, по которым он перемещается, приводит к его примерзанию и невозможности перемещения по высоте камеры шлюза.
Предлагаемое устройство решает проблему обеспечения возможности автоматической фиксации судов, в том числе безэкипажного типа, без использования швартовных устройств в камере шлюза во время ее наполнения и опорожнения. Для решения проблемы используется следующая совокупность существенных признаков: в устройстве для стоянки судов в камере шлюза при их шлюзовании, (содержащее так же, как и прототип, блок управления оборудованием шлюза, установленный в помещении нижней головы с возможностью взаимодействия со шлюзуемым судном и включающий: приемник АИС (автоматической идентификационной системы) и ЭВМ шлюза), в отличие от прототипа блок управления оборудованием шлюза дополнительно снабжен реле управления приводами затворов шлюза, wi-fi модулем с возможностью беспроводной связи с wi-fi модулем шлюзуемого судна, видеокамерами, установленными на головах шлюза со стороны верхнего и нижнего бьефов, а также в начале и конце камеры шлюза и соединенными через коммутатор с ЭВМ шлюза, связанной по средствам беспроводного wi-fi соединения, через бортовую ЭВМ судна, с блоком управления судном.
Сущность предлагаемого изобретения заключается в обеспечении возможности автоматической фиксации судна, в том числе безэкипажного типа, в камере шлюза без использования швартовных устройств во время опорожнения или наполнения камеры. Указанный результат достигается за счет синхронизации во времени режима открытия затворов наполнения и работы движителей судна таким образом, чтобы переменное усилие, действующее на судно от потока воды, наполняющего камеру, компенсировалось усилием от вращения движителей судна; и корректировки, обеспечивающей по данным видеонаблюдения отслеживание положения судна в камере шлюза и при смещении судна от первоначального положения путем изменения оборотов вращения движителей судна возвращение судна в исходное положение.
Сопоставление предлагаемого устройства и прототипа показало, что поставленная техническая задача, а именно - обеспечение возможности автоматической фиксации судов, в том числе безэкипажного типа, без использования швартовных устройств в камере шлюза во время ее наполнения и опорожнения, решается в результате новой совокупности признаков, за счет:
- индивидуального подбора режима наполнения или опорожнения камеры шлюза под конкретные параметры шлюзующегося судна (размеры судна, текущей осадки, типа двигателя и его мощности, типа и параметров винторулевого комплекса судна)
- использования технологий компьютерного зрения.
Это доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
Вместе с тем, проведенный информационный поиск в области эксплуатации водного транспорта не выявил решений, содержащих отдельные отличительные признаки изобретения, что позволяет сделать вывод о соответствии заявляемой системы критерию «изобретательский уровень».
Сущность заявляемого изобретения поясняется графическими материалами, где:
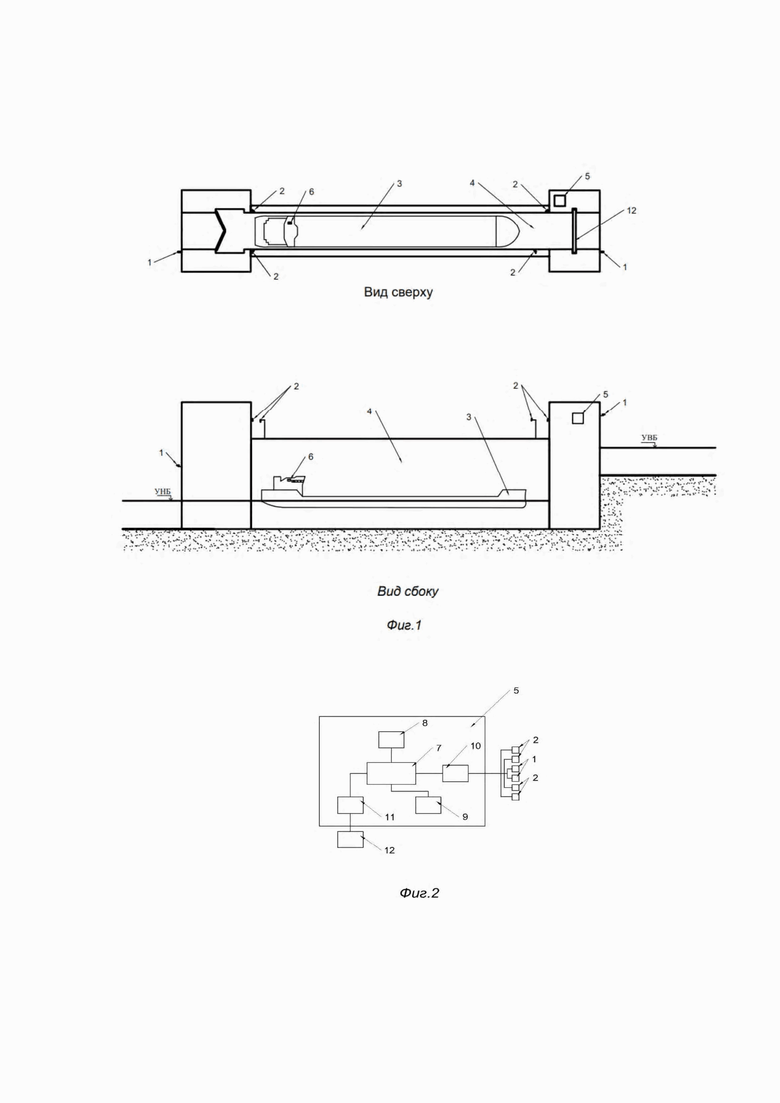
на фиг. 1 дано схематическое изображение камеры шлюза с элементами устройства;
на фиг. 2 схематическое изображение блока управления оборудованием шлюза,
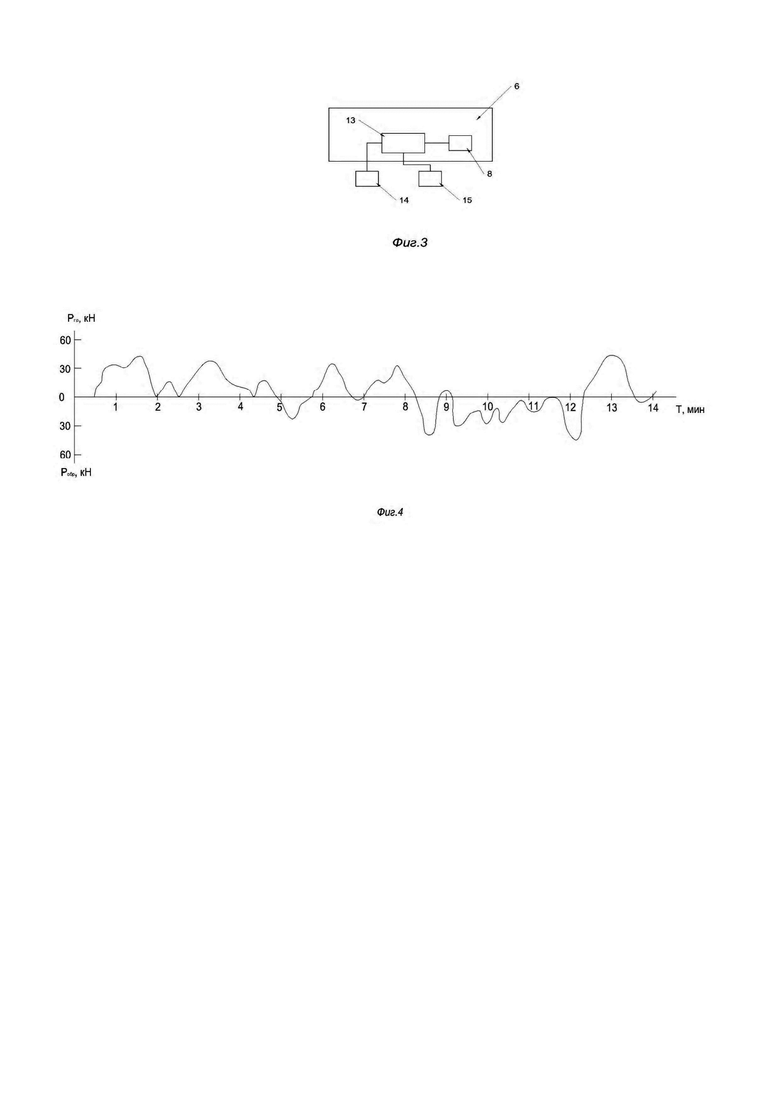
на фиг. 3 - схематическое изображение блока управления судном,
на фиг. 4 - изображение типового графика изменения гидродинамической силы при наполнении камеры.
На рисунках следующими позициями обозначены: 1 - видеокамеры, расположенные на головах шлюза со стороны верхнего и нижнего бьефов, 2 - видеокамеры, расположенные в начале и конце камеры шлюза на специальных кронштейнах, 3 - судно, 4 - камера шлюза, 5 - блок управления оборудованием шлюза, 6 - блок управления судном, 7 - ЭВМ шлюза, 8- wi-fi модуль, 9 - приемник АИС шлюза, 10 - коммутатор системы видеофиксации, 11- реле управления, 12 - приводы затворов наполнения, 13 - контроллер (бортовая ЭВМ), расположенный на судне, 14 - регулятор оборотов двигателей судна, 15 - датчик числа оборотов гребного вала.
Предлагаемое устройство работает следующим образом.
На этапе подхода к шлюзу по системе видеокамер 1 с применением технологии искусственного зрения устанавливается следующие параметры: тип, размеры, осадка судна 3. По установленному типу судна из базы данных, имеющейся в ЭВМ, определяют характеристики главного двигателя и винторулевого комплекса судна. С целью контроля и повышения безопасности, полученные параметры сравниваются с данными из автоматической идентификационной системой, установленной на шлюзе 9. В случае несовпадения данных, выбирается вариант, имеющий наибольше влияние на величину гидродинамической силы, действующей от потока воды на судно при шлюзовании. Далее ЭВМ 7, под конкретные параметры определенного ранее судна, рассчитывает индивидуальный, скоростной режим открытия затворов наполнения или опорожнения, который непосредственно влияет на величину и характер изменения гидродинамической силы во время шлюзования. Основным параметром, согласно действующему СП 101.13330.2023, который влияет на величину гидродинамической силы, является водоизмещение судна. Оно суммируется из неизменяемых параметров: длины, ширины и изменяемого параметра: осадки судна. Главными причинами, по которым рассчитываются индивидуальные параметры режима наполнения камеры, являются:
- обеспечение условия сохранения неподвижного положения судна («стоянки» судна) в камере при шлюзовании - равенство силы упора движителя и гидродинамической силы;
- наименьшее время, затрачиваемое на шлюзование для возможности использования максимальной пропускной способности шлюза.
Далее судно входит в камеру судоходного шлюза, останавливается в пределах полезной длины камеры, ограниченной носовой и кормовой стоп-линиями, блок управления судном 6 устанавливает беспроводное соединение по wi-fi модулю 8 с блоком управления оборудованием шлюза 5. После окончательной остановки судна в камере шлюза 4 системой видеокамер 2 соединенных через коммутатор 10 с ЭВМ 7 с применением технологии искусственного зрения фиксируется положение судна, которое в дальнейшем будет считаться исходным положением. Выполненные операции по подбору режима наполнения или опорожнения под конкретное судно и по видеофиксации исходного положения, позволяют приступить к процессу перемещения судна по высоте камеры. ЭВМ 7 подает управляющий сигнал на реле управления 11 приводов затворов наполнения 12 и начинается процесс поступления воды в камеру шлюза. В зависимости от времени, прошедшего от начала наполнения, гидродинамическое воздействие потока воды на судно меняется, как по направлению, так и по интенсивности, что требует постоянного контроля за числом оборотов винта с помощью датчика числа оборотов 15 и его регулировки путем изменения числа оборотов двигателя 14. Это достигается передачей управляющего сигнала от ЭВМ 7 на контроллер (бортовую ЭВМ) 13, расположенный на судне, через wi-fi модуль беспроводной связи 8. В случае, если системой видеофиксации 2 выявляется смещение судна от исходного положения, то вносится поправка в количество оборотов двигателя для возвращения судна в исходное положение. По окончании шлюзования судно прерывает wi-fi соединение и выходит из камеры шлюза.
Предлагаемое решение позволяет: исключить человеческий фактор; сократить время шлюзования и трудозатраты, связанные со швартовкой и отшвартовкой судна, остановкой и запуском двигателей судна в соответствии с действующими правилами пропуска судов; шлюзовать перспективные безэкипажные суда.
Заявленное изобретение разработано специалистами кафедры Гидротехнических сооружений, конструкций и гидравлики ФГБОУ ВО «Государственный университет морского и речного флота имени адмирала С.О. Макарова» в составе научно-исследовательской работы. Были произведены расчеты, показавшие возможность использования устройства на внутренних водных путях Российской Федерации.
Изложенное позволяет сделать вывод о соответствии изобретения критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Швартовое устройство | 1981 |
|
SU968148A1 |
| Швартовное устройство камеры шлюза | 1986 |
|
SU1402639A1 |
| Швартовное устройство | 1977 |
|
SU808576A1 |
| Устройство для швартовки судов в камере судоходного шлюза | 1981 |
|
SU1013564A1 |
| Способ управления гидротехническим затвором при подаче воды в шлюз и устройство для его осуществления | 1988 |
|
SU1617085A1 |
| ШВАРТОВОЕ ПРИЧАЛЬНОЕ УСТРОЙСТВО | 2020 |
|
RU2734644C1 |
| Устройство для управления режимом наполнения камер многоступенчатого шлюза | 1987 |
|
SU1411369A1 |
| ШВАРТОВОЕ ПРИЧАЛЬНОЕ УСТРОЙСТВО | 2019 |
|
RU2723697C1 |
| Швартовное устройство для судопропускных сооружения | 1975 |
|
SU579374A1 |
| СУДОХОДНЫЙ ШЛЮЗ | 1956 |
|
SU225072A1 |
Изобретение относится к устройству для стоянки судов в камере шлюза. Устройство содержит блок управления оборудованием шлюза. Блок управления установлен в помещении нижней головы камеры шлюза с возможностью взаимодействия со шлюзуемым судном. Блок управления включает приёмник АИС (автоматической идентификационной системы), ЭВМ шлюза, реле управления приводами затворов шлюза и Wi-Fi модуль. Wi-Fi модуль выполнен с возможностью беспроводной связи с Wi-Fi модулем шлюзуемого судна, видеокамерами, установленными на головах шлюза и соединенными через коммутатор с ЭВМ шлюза. ЭВМ шлюза выполнена с возможностью связи, через бортовую ЭВМ судна, с блоком управления судном. Достигается автоматическая фиксация судов без использования швартовных устройств в камере шлюза во время ее наполнения и опорожнения. 4 ил.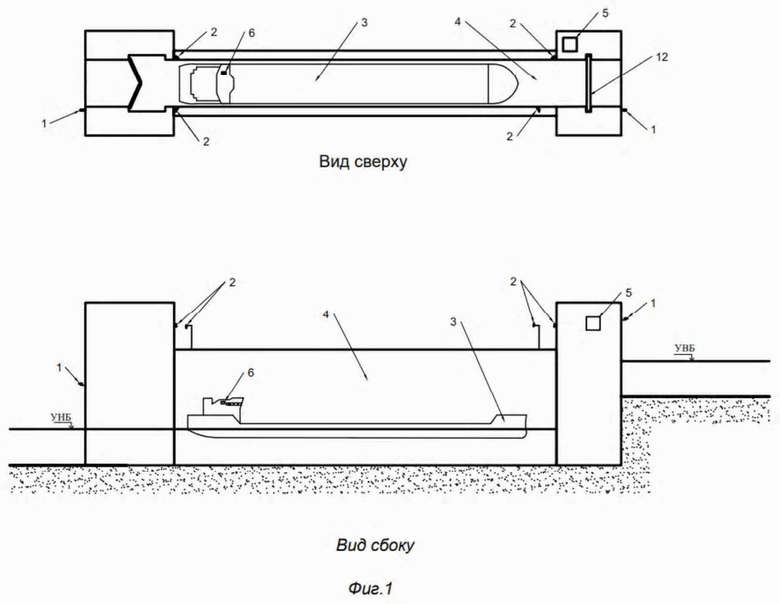
Устройство для стоянки судов в камере шлюза, содержащее блок управления оборудованием шлюза, установленный в помещении нижней головы камеры шлюза с возможностью взаимодействия со шлюзуемым судном и включающий приёмник АИС (автоматической идентификационной системы) и ЭВМ шлюза, отличающееся тем, что дополнительно снабжено реле управления приводами затворов шлюза, Wi-Fi модулем с возможностью беспроводной связи с Wi-Fi модулем шлюзуемого судна, видеокамерами, установленными на головах шлюза со стороны верхнего и нижнего бьефов, а также в начале и конце камеры шлюза и соединенными через коммутатор с ЭВМ шлюза, связанной, в свою очередь, через бортовую ЭВМ судна с блоком управления судном.
| US 2012129410 A1, 24.05.2012 | |||
| ШВАРТОВОЕ ПРИЧАЛЬНОЕ УСТРОЙСТВО | 2020 |
|
RU2734644C1 |
| УСТРОЙСТВО ЗАЩИТЫ ВОРОТ СУДОХОДНОГО ШЛЮЗА ОТ НАВАЛА СУДОВ | 2021 |
|
RU2764762C1 |
| Устройство для снятия асфальтобетона с дорожного покрытия | 1986 |
|
SU1384647A1 |
| US 3707717 A, 26.12.1972. | |||

