Изобретение относится к области автоматики, а именно к системам автоматического управления оборудованием (воротами, затворами, предохранительными устройствами и светофорами) судоходного гидротехнического сооружения, например шлюза.
Из уровня техники известна система автоматического управления оборудованием судоходного гидротехнического сооружения, содержащая комплект датчиков, комплект электродвигателей исполнительных механизмов и комплект светофоров, соединенных с контроллером (см. а.с. SU 1745816, кл. Е02С 1/00, опубл. 07.07.1992). Недостатком известного устройства является то, что выход из строя любого аппаратного или программного элемента приводит к остановке процесса шлюзования и задержке судопропуска до выяснения причин и устранения неисправности.
Задачей изобретения является устранение указанного недостатка и обеспечение штатного функционирования системы при возникновении любой ее неисправности.
Технический результат заключается в повышении надежности работы автоматической системы управления.
Поставленная задача решается, а технический результат достигается тем, что многоуровневая отказоустойчивая система автоматического управления оборудованием судоходного гидротехнического сооружения, содержащая первый комплект датчиков, соединенных с первым контроллером, комплект электродвигателей исполнительных механизмов и комплект светофоров, соединенных с первым контроллером, отличающаяся тем, что снабжена вторым контроллером, соединенным с первым комплектом датчиков, вторым комплектом датчиков, соединенным с первым и вторым контроллерами, первым комплектом усилителей-преобразователей, соединенным с комплектом электродвигателей исполнительных механизмов и первым контроллером, вторым комплектом усилителей-преобразователей, соединенным с комплектом электродвигателей исполнительных механизмов и вторым контроллером, первым комплектом местных пультов, соединенным с первым контроллером, вторым комплектом местных пультов, соединенным со вторым контроллером, первым комплектом датчиков электродвигателей исполнительных механизмов, соединенных с первым комплектом усилителей-преобразователей, вторым комплектом датчиков электродвигателей исполнительных механизмов, соединенных со вторым комплектом усилителей-преобразователей, первым вычислителем технологических состояний, соединенным с первым и вторым контроллерами, вторым вычислителем технологических состояний, соединенным с первым контроллером, вторым контроллером и первым вычислителем технологических состояний, информационно-диагностическим вычислителем, соединенным с первым и вторым вычислителями технологических состояний, а также системой технологического видеонаблюдения, соединенной с первым вычислителем технологических состояний, вторым вычислителем технологических состояний и информационно-диагностическим вычислителем, причем выходы светофоров подключены ко входам первого и второго контроллеров, а выходы первого и второго контроллеров подключены ко входам светофоров.
Все соединения, за исключением силовых, предпочтительно осуществлены посредством промышленной вычислительной сети.
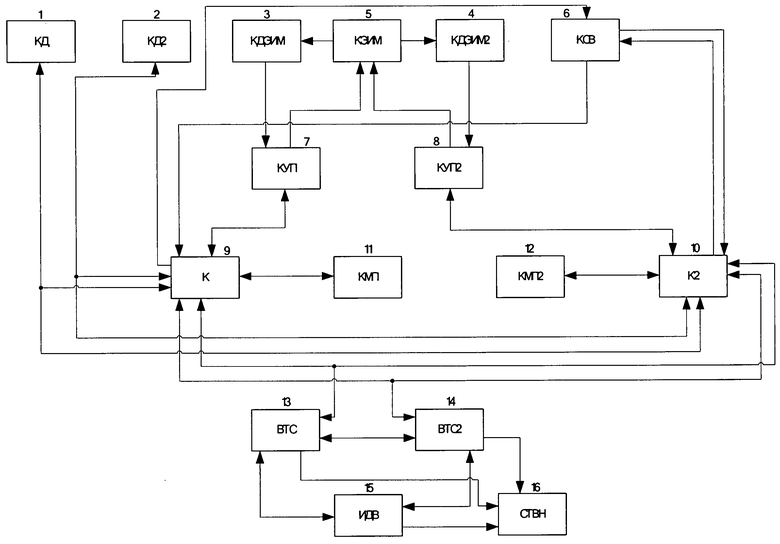
На чертеже схематично представлена предлагаемая система автоматического управления.
Многоуровневая отказоустойчивая система автоматического управления оборудованием судоходного гидротехнического сооружения содержит четыре уровня управления. В состав первого уровня входят:
- первый комплект датчиков КД - 1,
- второй комплект датчиков КД2 - 2,
- первый комплект датчиков электродвигателей исполнительных механизмов КДЭИМ - 3,
- второй комплект датчиков электродвигателей исполнительных механизмов КДЭИМ2 - 4,
- комплект электродвигателей исполнительных механизмов КЭИМ - 5,
- комплект светофоров КСВ - 6.
В состав второго уровня входят:
- первый комплект усилителей-преобразователей КУП - 7,
- второй комплект усилителей-преобразователей КУП - 8,
- первый контроллер К - 9,
- второй контроллер К2 - 10,
- первый комплект местных пультов КМП - 11,
- второй комплект местных пультов КМП2 - 12.
В состав третьего уровня входят:
- первый вычислитель технологических состояний ВТС - 13,
- второй вычислитель технологических состояний ВТС2 - 14.
В состав четвертого уровня входят:
- информационно-диагностический вычислитель ИДВ - 15,
- система технологического видеонаблюдения СТВН - 16.
Элементы системы соединены посредством промышленной вычислительной сети (ПВС) по схеме, представленной на чертеже, за исключением силовых соединений от КУП и КУП2 к КЭИМ.
На первом уровне осуществляются требуемые манипуляции оборудованием судоходного гидротехнического сооружения: перемещения ворот, затворов и предохранительных устройств с помощью КЭИМ 5, а также требуемые переключения сигналов КСВ 6. КЭИМ 5 осуществляет требуемые перемещения ворот, затворов и заградительных устройств вне зависимости от типа привода затвора, т.е. независимо от того, это электро- или гидропривод.
Второй уровень с помощью К9 и К2 10 на базе информации от КД 1 и КД2 2 (в состав которых входят все датчики, применяемые в процессе шлюзования: датчики температуры, уровня бьефов, скорости и направления ветра, концевые выключатели, датчики фактических положений затворов, ворот и предохранительных устройств) осуществляет формирование управляющих воздействий, передаваемых на КУП 7 и КУП2 8 (выполненных в виде частотных преобразователей, устройств плавного пуска, магнитных пускателей и т.п.) и использующих информацию от КДЭИМ 3 и КДЭИМ2 4 (содержащих в своем составе инкрементальные энкодеры и датчики температуры, установленные на электродвигателях КЭИМ 5). КУП 7 и КУП2 8 в свою очередь непосредственно управляют движением КЭИМ 5, а К9 и К2 10 формируют управляющие сигналы для светофоров КСВ 6, информация о работе которых возвращается контроллерам К 9 и К2 10. Комплекты местных пультов КМП 11 и КМП2 12, представляющие собой программируемые или кнопочные терминалы, позволяют в ручном режиме управлять движением затворов по цепям КМП 11 - К 9 - КУП 7 - КЭИМ 5 и КМП2 12 - К2 10 - КУП2 8 - КЭИМ 5 без привлечения к процессу управления аппаратуры более высоких уровней, что актуально при производстве регламентных, ремонтных и пусконаладочных работ.
Третий уровень, в состав которого входят ВТС 13 и ВТС2 14, содержащие в своем составе средства отображения и ввода информации (программируемые графические терминалы и т.п.), отвечает за выдачу разрешений на маневрирование воротами и затворами шлюза в зависимости от контролируемого ВТС 13 и ВТС2 14 состояния шлюза с учетом всех осуществленных в каждом технологическом состоянии блокировок. Соответствующая информация формируется по цепям КД 1 - К 9 - К2 10 - ВТС 13 - ВТС2 14 и КД2 2 - К 9 - К2 10 - ВТС 13 - ВТС2 14. Технологическое состояние шлюза определяется взаимным расположением шлюзуемого судна, наличием или отсутствием его швартовки, уровня воды в верхнем и нижнем бьефе и в камере, положением ворот и затворов шлюза, а также сигналов светофоров. Если предполагаемая к проведению операция маневрирования воротами и затворами является с точки зрения заложенной в вычислитель ВТС 13 программы допустимой, им формируется разрешающий сигнал, поступающий на К 9 и далее в конечном счете на КСВ 6 и КЭИМ 5 для маневра воротами и затворами. Эти разрешающие команды могут осуществляться как в автоматическом режиме, когда оператор на графическом терминале вводит одну команду, или же эта команда поступает с более высокого уровня, например «шлюзовать вверх», и далее процесс продолжается автоматически до подтверждения швартовки судна и затем до окончания шлюзования, так и в цикловом режиме, когда каждая последующая операцию требует подтверждения. Кроме того, система допускает управление в т.н. раздельном и специальном режимах, фактически это режимы ручного управления. Точно так же работают и цепи ВТС2 14 - К2 10 и далее в конечном счете на КСВ 6 и КЭИМ 5. Управляющие воздействия вне зависимости от выбранного режима управления могут быть заданы с терминалов ВТС 13 или ВТС2 14, или с более высоких уровней непосредственно на ВТС и ВТС2, за исключением некоторых специальных режимов, когда управляющие воздействия могут быть заданы с КМП 11 или КМП2 12.
Четвертый уровень содержит ИДВ 15, связанный по ПВС с ВТС 13, ВТС2 14 и СТВН 16, выполненный в виде промышленного компьютера со средством отображения информации (монитором), и обеспечивает регистрацию, архивирование данных и подготовку пакетов информации для передачи в межшлюзовую ПВС для связи и обмена информацией с другими шлюзами, в том числе с ИДВ диспетчера канала. Регистрация и архивирование данных осуществляется по всем заранее заданным параметрам процесса шлюзования и по условиям, в которых шлюзование осуществляется. Кроме того, в состав четвертого уровня входит СТВН 16, подключенная к ВТС 13, ВТС2 14 и ИДВ 15 и обеспечивающая получение оператором визуальной информации обо всех этапах шлюзования судна и ее автоматическую регистрацию и архивирование.
В целом предлагаемая система автоматического управления работает следующим образом:
При наличии технологической готовности всех устройств шлюза к началу процесса шлюзования, которая формируется по сигналам КД 1, КДЭИМ 3, КСВ 6 и К 9 и по второй цепи КД2 2, КДЭИМ2 4, КСВ 6 и К2 10 в ВТС 13 (ВТС2 14) и отображается на терминалах ВТС 13 (ВТС2 14), формируется соответствующая управляющая команда, например «шлюзовать вверх» или «шлюзовать вниз». Команда о начале шлюзования поступает в К9 и в К2 10, которые в свою очередь формируют управляющие воздействия на КСВ 6, КУП 7 (КУП2 8) и далее в КЭИМ 5, что приводит к изменению сигналов светофоров КСВ 6 и необходимому маневрированию затворами и воротами шлюза. При этом сигналы обо всех текущих параметрах процесса шлюзования от КД 1 и КДЭИМ 3 (КД2 2 и КДЭИМ2 4), в том числе о текущих положениях и скоростях ворот и затворов постоянно поступают на КУП 7 (КУШ 8) и К9 (К2 10) и далее на ВТС 13 (ВТС2 14), при этом контроллеры К 9 (К2 10) и ВТС 13 (ВТС2 14) отслеживают нахождение всех параметров системы в допустимых пределах. Одновременно эти параметры от ВТС 13 (ВТС2 14) поступают на ИДВ 15 для их регистрации и архивирования. В случае выхода любого из параметров шлюзования за допустимые пределы система останавливает процесс шлюзования в положении всех устройств, достигнутом к моменту останова. Если же в процессе шлюзования возникает неисправность любого из элементов (аппаратного или программного), система идентифицирует неисправный элемент, выдает сообщение о его неисправности на мониторы ВТС 13 (ВТС2 14) и в архив ИДВ 15, и автоматически переходит на управление по исправному каналу. СТВН 16 позволяет оператору визуально наблюдать процесс шлюзования, производить регистрацию и архивирование данных технологического видеонаблюдения. По окончании процесса шлюзования система сообщает о завершении процесса и переходит к состоянию ожидания следующей команды. Работа системы во всех других режимах является частным случаем работы системы в автоматическом режиме.
Если произошел отказ одновременно в двух каналах четвертого и третьего уровней, система позволяет осуществлять судопропуск путем использования устройств первого и второго уровней. Если же при этом произошел отказ одного из каналов первого и второго уровней, система позволяет осуществлять судопропуск по исправным каналам первого и второго уровней.
Такое построение системы с резервированием и многоуровневым контролем позволяет значительно повысить отказоустойчивость и надежность предлагаемого устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ДВУСТВОРЧАТЫХ ВОРОТ СУДОХОДНОГО ШЛЮЗА | 2012 |
|
RU2496940C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ГИДРОТЕХНИЧЕСКОГО ЗАТВОРА | 2010 |
|
RU2438060C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ ГИДРОПРИВОД ДЛЯ ГИДРОТЕХНИЧЕСКОГО ЗАТВОРА | 2010 |
|
RU2435991C1 |
| Устройство автоматического управления судоходным однокамерным шлюзом | 1990 |
|
SU1745816A1 |
| СПОСОБ КОНТРОЛЯ ПОЗИЦИОНИРОВАНИЯ СТВОРОК ДВУСТВОРЧАТЫХ ВОРОТ ШЛЮЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459033C1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Сегментный затвор с гидравлическим приводом | 2022 |
|
RU2810327C1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
Изобретение относится к области автоматики, а именно к системам автоматического управления оборудованием (воротами, затворами, предохранительными устройствами и светофорами) судоходного гидротехнического сооружения, например шлюза. Многоуровневая отказоустойчивая система автоматического управления оборудованием судоходного гидротехнического сооружения содержит первый комплект датчиков (КД), комплект электродвигателей исполнительных механизмов (КЭИМ) и комплект светофоров (КСВ), соединенных с первым (К) и вторым (К2) контроллерами. Система снабжена вторым комплектом датчиков (КД2), соединенным с К и К2, первым комплектом усилителей-преобразователей (КУП), соединенным с комплектом КЭИМ и К, и вторым КУП2, соединенным с комплектом КЭИМ и К2. Кроме того, система снабжена первым комплектом местных пультов (КМП), соединенным с К, вторым КМП2, соединенным с К2, первым комплектом датчиков электродвигателей исполнительных механизмов (КДЭИМ), соединенных с КУП, и вторым КДЭИМ2, соединенных с КУП2. В систему также входит первый вычислитель технологических состояний (ВТС), соединенный с К и К2, второй ВТС2, соединенный с К, К2 и ВТС, информационно-диагностический вычислитель (ИДВ), соединенный с ВТС и ВТС2, а также система технологического видеонаблюдения (СТВН), соединенная с ВТС, ВТС2 и ИДВ. Выходы светофоров подключены ко входам К и К2, а выходы К и К2 подключены ко входам светофоров. Изобретение позволяет повысить надежность работы автоматической системы управления. 1 ил.
Многоуровневая отказоустойчивая система автоматического управления оборудованием судоходного гидротехнического сооружения, содержащая первый комплект датчиков, соединенных с первым контроллером, комплект электродвигателей исполнительных механизмов и комплект светофоров, соединенных с первым контроллером, отличающаяся тем, что снабжена вторым контроллером, соединенным с первым комплектом датчиков, вторым комплектом датчиков, соединенным с первым и вторым контроллерами, первым комплектом усилителей-преобразователей, соединенным с комплектом электродвигателей исполнительных механизмов и первым контроллером, вторым комплектом усилителей-преобразователей, соединенным с комплектом электродвигателей исполнительных механизмов и вторым контроллером, первым комплектом местных пультов, соединенным с первым контроллером, вторым комплектом местных пультов, соединенным со вторым контроллером, первым комплектом датчиков электродвигателей исполнительных механизмов, соединенных с первым комплектом усилителей-преобразователей, вторым комплектом датчиков электродвигателей исполнительных механизмов, соединенных со вторым комплектом усилителей-преобразователей, первым вычислителем технологических состояний, соединенным с первым и вторым контроллерами, вторым вычислителем технологических состояний, соединенным с первым контроллером, вторым контроллером и первым вычислителем технологических состояний, информационно-диагностическим вычислителем, соединенным с первым и вторым вычислителями технологических состояний, а также системой технологического видеонаблюдения, соединенной с первым вычислителем технологических состояний, вторым вычислителем технологических состояний и информационно-диагностическим вычислителем, причем выходы светофоров подключены ко входам первого и второго контроллеров, а выходы первого и второго контроллеров подключены ко входам светофоров.

