Изобретение относится к бесконтактным устройствам передачи цифровых сигналов, используемых в многоканальных системах съема информации с вра- j ающихся объектов.
Цель изобретения - повышение пропускной способности путем обеспечения возможности двунаправленной передачи информации между вращающейся-и непод-ю вижной частями устройства и его упрощение.
На фиг.1 представлена функциональная схема устройства; на фиг.2 - функциональная схема блока управляемой 15 латгрузкм.1 на фиг.З - функциональная схема модулятора; на фиг.4 и 5 - временные диаграммы работы модулятора и устройства.
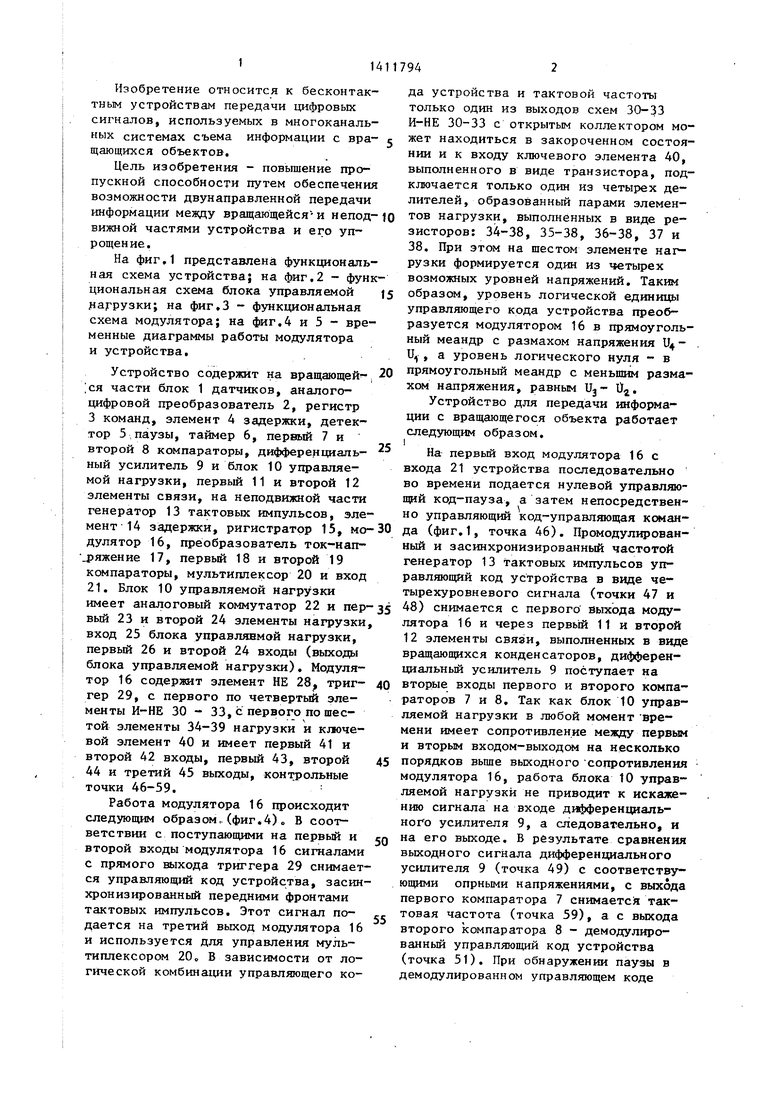
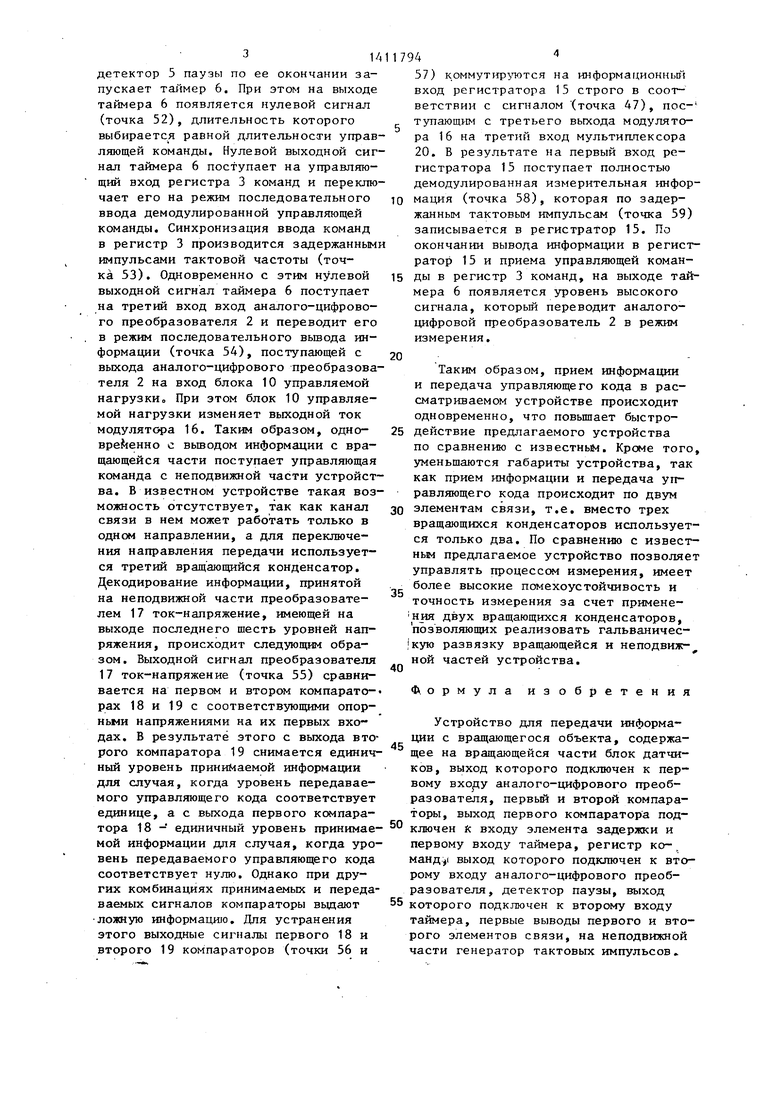
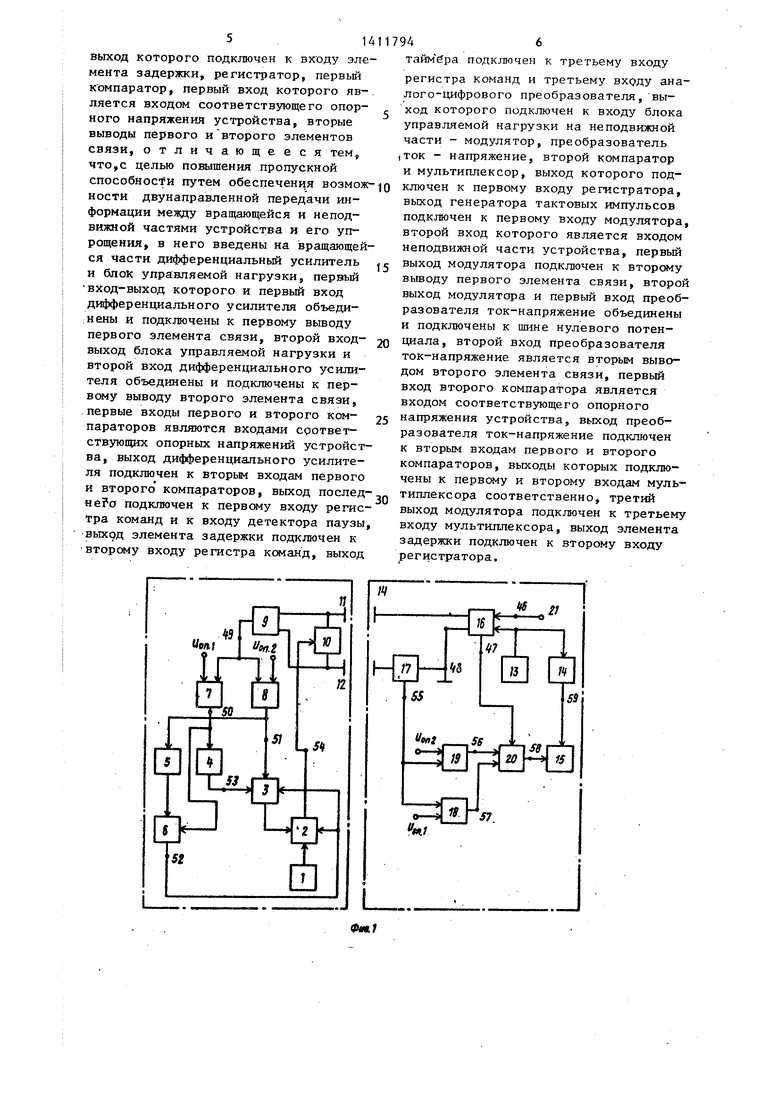
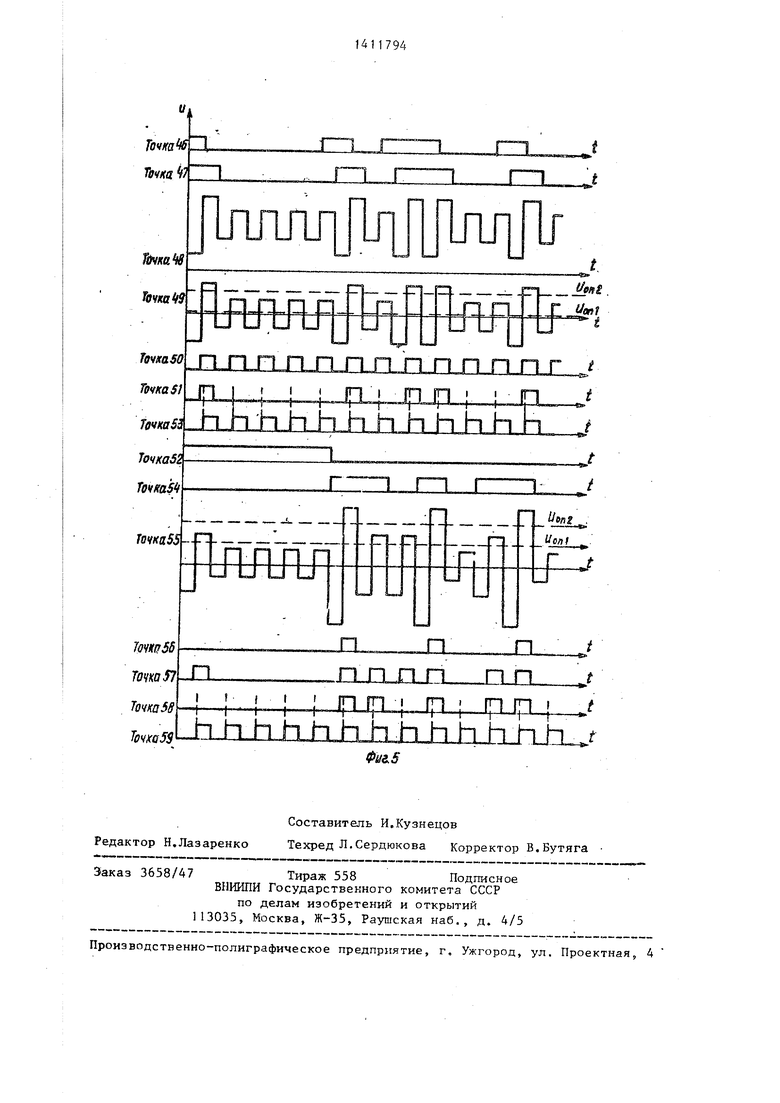
Устройство содержит на вращающей -, 20 ся части блок 1 датчиков, аналого- цифровой преобразователь 2, регистр 3 команд, элемент 4 задержки, детектор 5,паузы, таймер 6, первый 7 и второй 8 компараторы, дифференциаль- ный усилитель 9 и блок 10 управляемой нагрузки, первый 11 и второй 12 элементы связи, на неподвижной части генератор 13 тактовых импульсов, элемент 14 задержки, ригистратрр 15, мо-30 дулятор 16, преобразователь ток-нап- ряжение 17, первый 18 и второй 19 компараторы, мультиплексор 20 и вход 21. Блок 10 управляемой нагрузки имеет аналоговый коммутатор 22 и пер-35 вый 23 и второй 24 элементы нагрузки, вход 25 блока управлянмой нагрузки, первый 26 и второй 24 входы (выходы блока управляемой нагрузки). Модулятор 16 содержит элемент НЕ 28, триг- дО гер 29, с первого по четвертый элементы И-НЕ 30 - 33,с первого по шестой элементы 34-39 нагрузки и клоче- вой элемент 40 и имеет первый 41 и второй 42 входы, первый 43, второй 45 44 и третий 45 выходы, контрольные точки 46-59.
Работа модулятора 16 происходит следующим образом,, (фиг.4) о В соответствии с поступающими на первый и 0 второй входы модулятора 16 сигналами с прямого выхода триггера 29 снимается управляющий код устройства, засин- хронизированный передними фронтами тактовых импульсов. Этот сигнал по- - дается на третий выход модулятора 16 и используется для управления мультиплексором 20„ В зависимости от логической комбинации управляющего кода устройства и тактовой частоты только один из выходов схем 30-33 И-НЕ 30-33 с открытым коллектором может находиться в закороченном состоянии и к входу ключевого элемента 40, выполненного в виде транзистора, подключается только один из четырех делителей, образованный парами элементов нагрузки, выполненных в виде резисторов: 34-38, 35-38, 36-38, 37 и 38. При этом на шестом элементе нагрузки формируется один из четырех возможных уровней напряжений. Таким образом, уровень логической единицы управляющего кода устройства преобразуется модулятором 16 в прямоугольный меандр с размахом напряжения U4- U|, а уровень логического нуля - в прямоугольный меандр с меньщим размахом напряжения, равным Uj- О.
Устройство для передачи информации с вращающегося объекта работает
следующим образом. I
На первый вход модулятора 16с
входа 21 устройства последовательно во времени подается нулевой управляющий код-пауза, а затем непосредственно управляющий код-управляющая команда (фиг.1, точка 46). Промодулирован- ный и засинхронизированный частотой генератор 13 тактовых импульсов управляющий код устройства в виде четырехуровневого сигнала (точки 47 и 48) снимается с первого выхода модулятора 16 и через первьй 11 и второй 12 элементы связи, выполненных в виде вращающихся конденсаторов, дифференциальный усилитель 9 поступает на вторые входы первого и второго компараторов 7 и 8. Так как блок 10 управляемой нагрузки в любой момент времени имеет сопротивление между первым и вторым входом-выходом на несколько порядков вьппе выходного сопротивления модулятора 16, работа блока 10 управляемой нагрузки не приводит к искажению сигнала на входе дифференциаль- усилителя 9, а следовательно, и на его выходе. В результате сравнения выходного сигнала дифференциального усилителя 9 (точка 49) с соответствующими опрными напряжениями, с выхода первого компаратора 7 снимается тактовая частота (точка 59), а с выхода второго компаратора 8 - демодулиро- ванный управляющий код устройства (точка 51). При обнаружении паузы в демодулированном управл}пощем коде
314
детектор 5 паузы по ее окончании запускает таймер 6. При этом на выходе таймера 6 появляется нулевой сигнал (точка 52), длительность которого выбирается равной длительности управляющей команды. Нулевой выходной сигнал таймера 6 поступает на управляющий вход регистра 3 команд и переключает его на режим последовательного ввода демодулированной управляющей команды. Синхронизация ввода команд в регистр 3 производится задержанными импульсами тактовой частоты (точка 53). Одновременно с этим нулевой выходной сигнал таймера 6 поступает на третий вход вход аналого-цифрового преобразователя 2 и переводит его в режим последовательного вьшода информации (точка 54), поступающей с выхода аналого-цифрового преобразователя 2 на вход блока 10 управляемой нагрузки При этом блок 10 управляемой нагрузки изменяет выходной ток модулятора 16. Таким образом, одно- BpeiicHHo с вьтодом информации с вращающейся части поступает управляющая команда с неподвижной части устройства. В известном устройстве такая возможность отсутствует, так как канал связи в нем может работать только в одном направлении, а для переключения направления передачи используется третий вращающийся конденсатор. Декодирование информации, принятой на неподвижной части преобразователем 17 ток-напряжение, имеющей на выходе последнего шесть уровней напряжения, происходит следующим образом. Выходной сигнал преобразователя 17 ток-напряжение (точка 55) сравнивается на первом и втором компаратоpax 18 и 19 с соответствующими опорными напряжениями на их первых входах. В результате этого с выхода второго компаратора 19 снимается единичный уровень принимаемой информации для случая, когда уровень передаваемого управляющего кода соответствует единице, а с выхода первого компаратора 18 - единичный уровень принимаемой информации для случая, когда уровень передаваемого управляющего кода соответствует нулю. Однако при других комбинациях принимаемых и передаваемых сигналов компараторы вьодают ложную информацию. Для устранения этого выходные сигналы первого 18 и второго 19 компараторов (точки 56 и
4
57) коммутируются на кнформационньп вход регистратора 15 строго в соответствии с сигналом (точка 47), псе- тупающим с третьего выхода модулятора 16 на третий вход мультип-пексора 20. В результате на первый вход регистратора 15 поступает полностью демодулИРованная измерительная информация (точка 58), которая по задержанным тактовым импульсам (точка 59) записывается в регистратор 15. По окончании вывода информации в регистратор 13 и приема управляющей команды в регистр 3 команд, на выходе таймера 6 появляется уровень высокого сигнала, который переводит аналого- цифровой преобразователь 2 в режим измерения.
Таким образом, прием информации и передача управляющего кода в рассматриваемом устройстве происходит одновременно, что повьшает быстродействие предлагаемого устройства по сравнению с известньй. Кроме того, уменьшаются габариты устройства, так как прием информации и передача управляющего кода происходит по двум
элементам связи, т.е. вместо трех
вращающихся конденсаторов используется только два. По сравнению с известным предлагаемое устройство позволяет управлять процессом измерения, имеет более высокие помехоустойчивость и точность измерения за счет применения двух вращающихся конденсаторов, позволяющих реализовать гальваническую развязку вращающейся и неподвиж- ной частей устройства.
5
0
5
Ф. ормула изобретения
Устройство для передачи информации с вращающегося объекта, содержащее на вращающейся части блок датчиков, выход которого подключен к первому аналого-цифрового преобразователя, первый и второй компараторы, выход первого компаратора подключен fc входу элемента задержки и первому входу таймера, регистр ко-. манд( выход которого подключен к второму входу аналого-цифрового преобразователя, детектор паузы, выход которого подключен к второму входу таймера, первые выводы первого и второго элементов связи, на неподвижной части генератор тактовых импульсов..
ts
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи информации с вращающегося объекта | 1986 |
|
SU1334173A1 |
| Радиометр | 1990 |
|
SU1723460A1 |
| Регистратор сигналов с усреднением | 1982 |
|
SU1112230A1 |
| РЕГИСТРАТОР ПАРАМЕТРОВ АВАРИЙНЫХ СИТУАЦИЙ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ ПОВЫШЕННОЙ ТОЧНОСТИ (ВАРИАНТЫ) | 2008 |
|
RU2376625C1 |
| РЕГИСТРАТОР ПАРАМЕТРОВ АВАРИЙНЫХ СИТУАЦИЙ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ | 2008 |
|
RU2381549C2 |
| Устройство для цифровой записи-воспроизведения цифровой информации | 1990 |
|
SU1788521A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1125643A1 |
| Устройство для приготовления газовых смесей | 1988 |
|
SU1615610A1 |
| МНОГОКАНАЛЬНОЕ АКУСТИКО-ЭМИССИОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗДЕЛИЙ | 1995 |
|
RU2105301C1 |
| Устройство для контроля деградации МДП-структур | 1990 |
|
SU1783454A1 |
Изобретение относится к бесконтактным устройствам передачи цифровых сигналов, используемьк в многоканальных системах съема информации с вращающихся объектов. Цель изобретения - повышение пропускной способности путем обеспечения возможности двунаправленной передачи информации между вращающейся и неподвижной устройства и его упрощение. Устройство содержит на вращающейся части блок датчиков, аналого-цифровой преобразователь, регистр команд, элемент задержки, детектор паузы, таймер, первый и второй компараторы, дифференциальный усилитель, блок управляемой нагрузки, первый и второй компараторы, дифференциальный усилитель, блок управляемой нагрузки, первый и второй элементы связи, на неподвижной части генератор тактовых импульсов, элемент задержки, регистратор, модулятор, преобразователь ток-напряжение, первый и второй компараторы и мультиплексор. Устройство -позволяет, используя только два элемента связи, выполненных в виде вращающихся конденсаторов, осуществлять одновременную передачу информации в направлении вращающейся и неподвижной .его частей. 5 ил. (О (Л
I
z
9ut2
| Устройство для передачи информации с вращающегося объекта | 1986 |
|
SU1334173A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
