сс.
Изобретение относится к электротехнике, а именно к частотно-управляемым, электроприводам, построенным на базе машин переменного тока и бесконтактных тахогенераторов, может быть использовано, например, в металлорежущих станках, моде лир зпощих стендах и является усовершенствованием изобретения по авт.св. № 1336189.
Целью изобретения является расширение диапазона регулируемых частот вращения путем устранения пульсаций в выходном напряжении измерительного синхронного генератора.
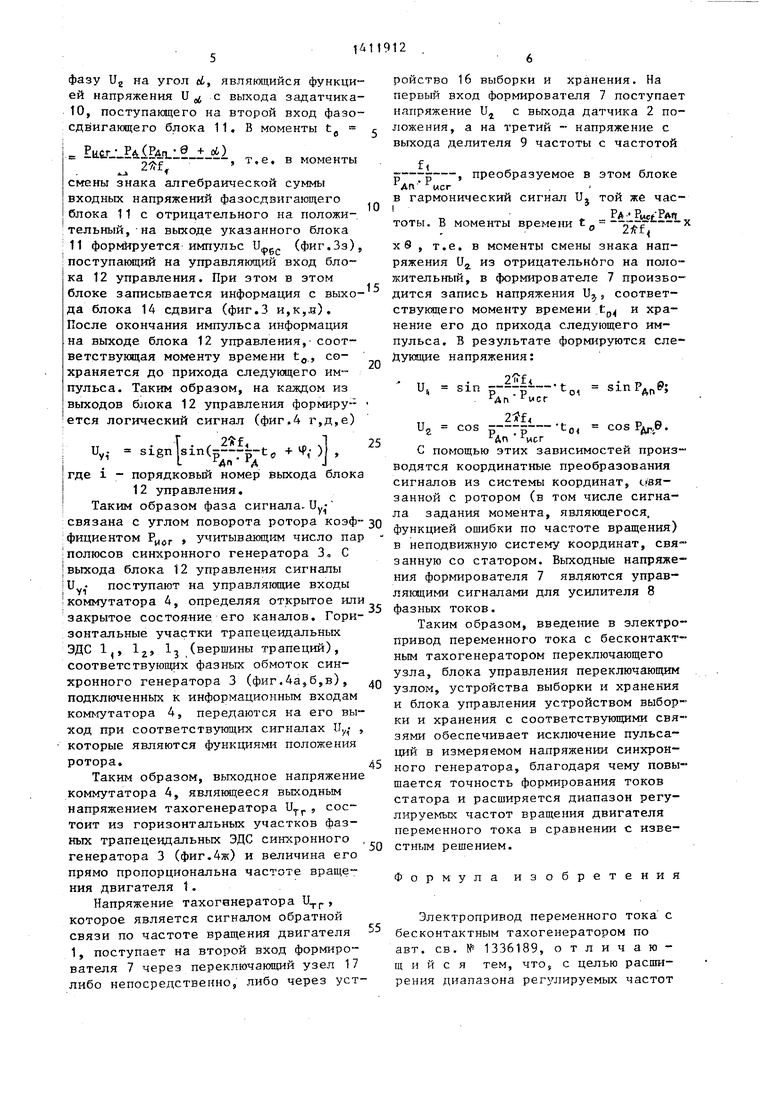
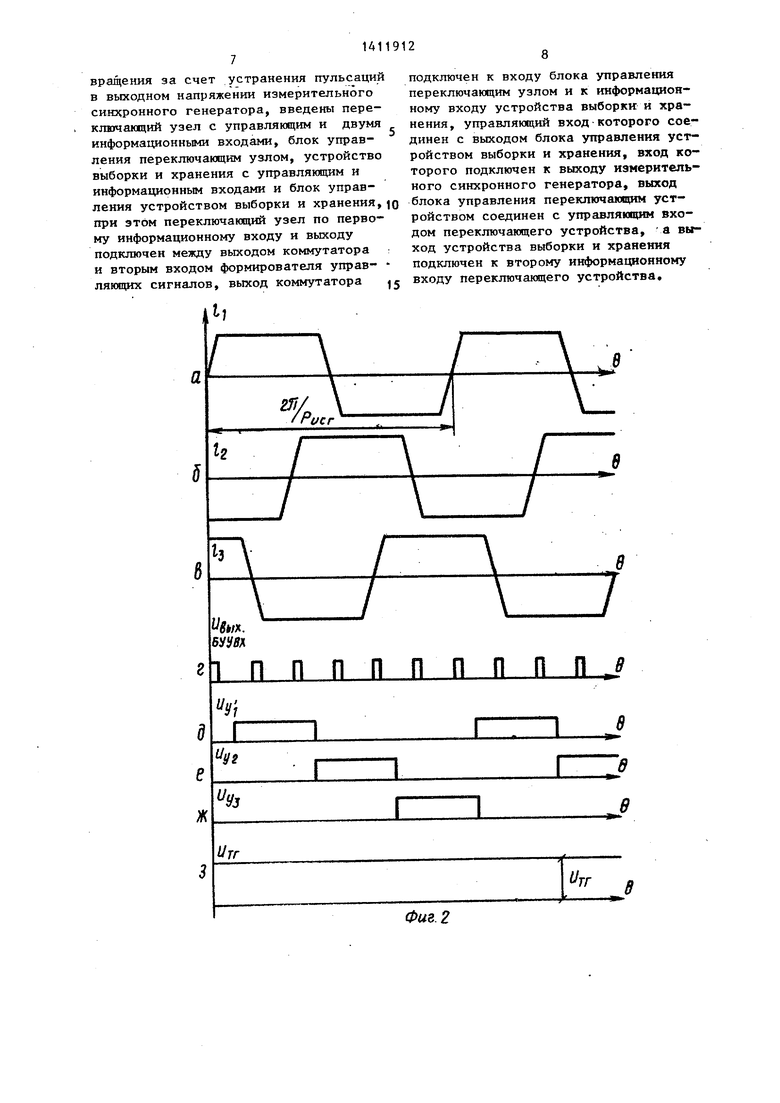
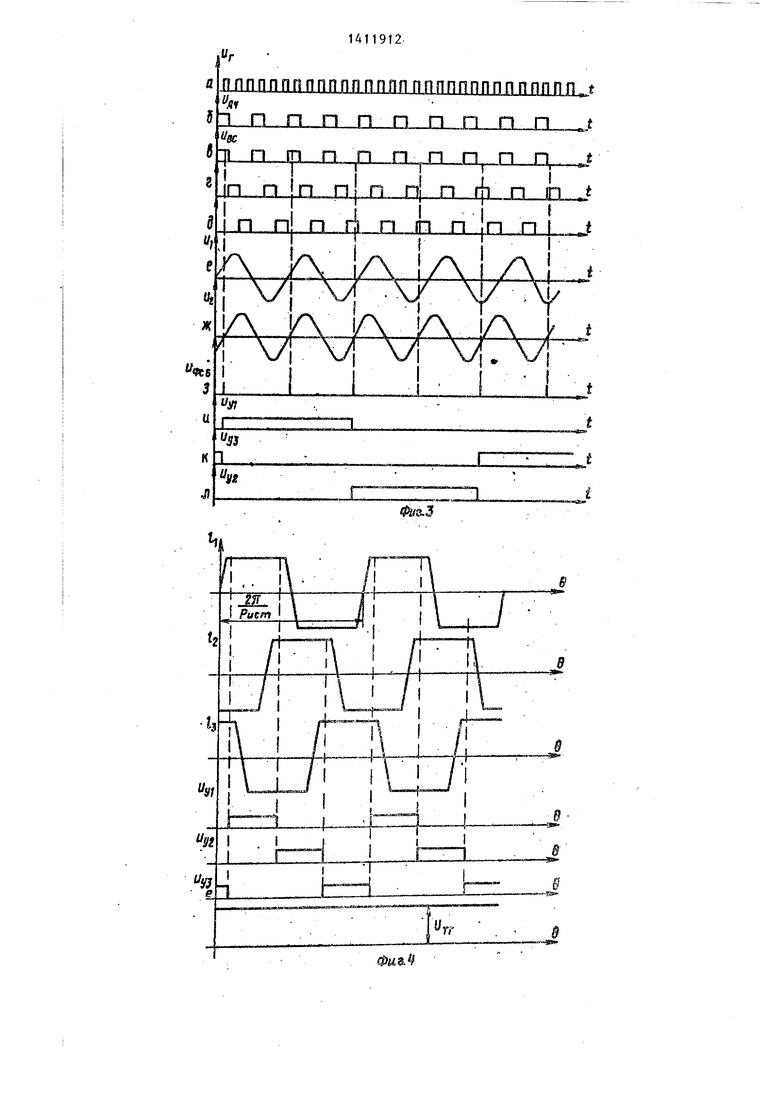
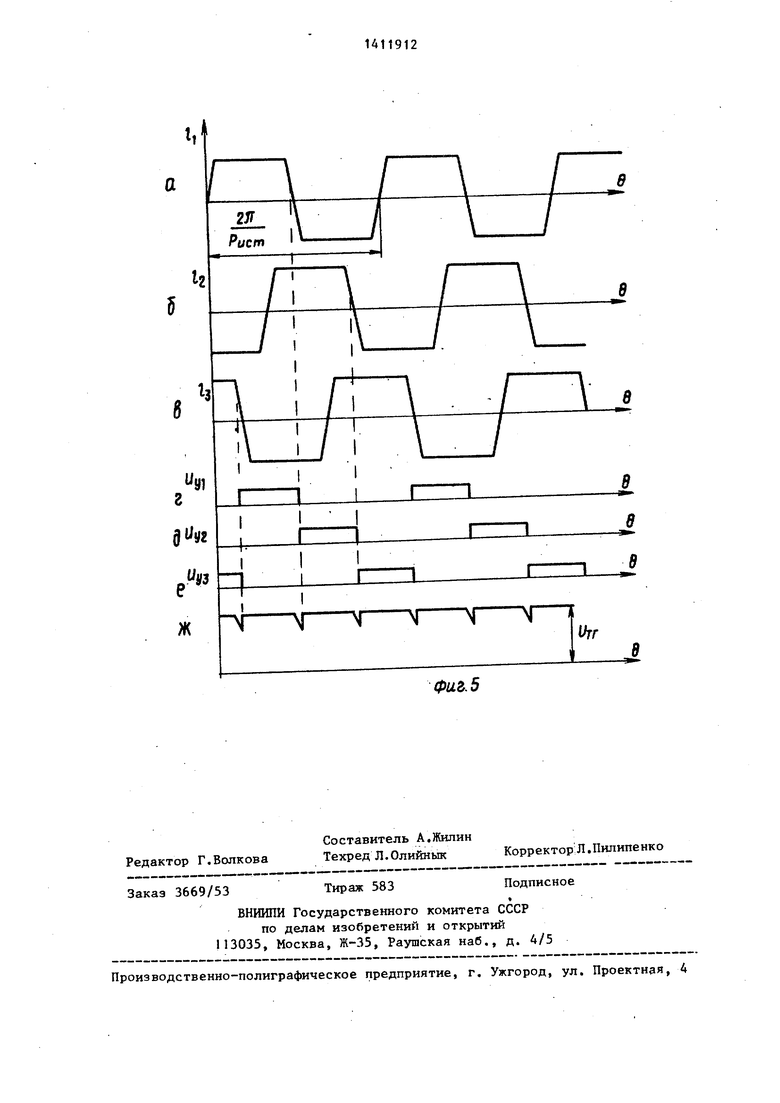
На фиг,1 изображена функциональная схема электропривода переменного тока с бесконтактным тахогенератором; на фиг.2 - эпюры напряжений, поясняющие работу блока управления устройством выборки и хранения и устройства выборки и хранения; на фиг.З - то же, поясняющие работу делителя частоты, блока сдвига и блока управления ком- татором} на фиг,4 - то же, поясняющие работу коммутатораf на фиг.5 - то же, поясняклцие возможнос гь появления пульсаций в измеряемом напряжении.
Электропривод переменного тока соцержит двигатель 1 переменного тока (фиг.1), индуктивный датчик 2 положе- |ния и бесконтактный тахогенератор в ввде синхронного генератора 3, механически связанные с валом двигателя.
коммутатор 4, последовательно соеди- Ценные генератор 5 и блок 6 согласо- Ьания частот, последовательно соеди- Иенные формирователь 7 управлякяцих Ьигналов с тремя входами и усилитель 8 фазных токов, выходы которого под- (слючены к фазным обмоткам двигателя 1, К информационнь1М входам коммутато |за 4 подключены обмотки синхронного Генератора 3. Выход блока б согласо- бания частот подключен к входу дат- йика 2 положения, Первьй вход форми- :{)ователя 7 соединен с выходом датчи- ka 2 положения,
Электропривод содержит также пер- делитель 9 частоты, задатчик 10 (Сигнала коррекции, фазосдвигающий $лок 11 с двумя входами, блок 12 уп- |(|авления коммутатором с управляющим и информационным входами, а также последовательно соединенные второй Делитель 13 частоты и блок 14 сдвига подключенный выходом к информационному входу блока 12 управления, уп
5
0 5
о
5
Q С
Q
равляющий вход которого соединен с выходом фазосдвигающего блока 11. Выход блока 12 управления подключен к управляющему входу коммутатора 4, входы делителей 9 и 13 частоты соединены с выходом генератора 5, Выход делителя 9 частоты подключён к третьему входу формирователя 7. Первый вход фазосдвигающего блока 11 соединен с выходом задатчрша 10 сигнала коррекции, а второй вход - с выходом датчика 2 положения, В электропривод переменного тока введены последовательно соединенные блок 15 управления устройством выборки и хранения, устройство 16 выборки и хранения и переключающий узел 17 с двумя информационными и управляющими входами, а также блок 18 управления переключающим узлом 17, Выход коммутатора 4 подключен к входу блока 18 управления, к первому информационному входу переключающего узла 17 и к информационному входу устройства 16 выборки и хранения. Вход блока 15 управления подключен к обмоткам синхронного генератора 3, а выход переключающего узла 17 соединен с вторым входом формирователя 7,
В качестве переключаннцего узла 17 и устройства 16 выборки и хранения могут быть использованы серийно выпускаемые микросхемы.
Блок 15 управления может быть выполнен из т-идентичных каналов, состоящих из суммирующего компаратора и формирователя импульсов, причем выходы формирователей импульсов объединены по схеме ИЛИ-НЕ, входами блока 15 управления являются входы суммирующих компараторов, а выходом - выход элемента ИЛИ-НЕ.
Блок 18 управления состоит из последовательно соединенных выпрямителя и суммирующего компаратора с двукя выходами, причем на первый вход компаратора подано эталонное напряжение, а второй его вход соединен с выходом выпрямителя. Входом этого блока является вход выпрямителя, а выходом - выход компаратора.
Все эпюры фиг.2-5 приведены для случая, когда число пар полюсов двигателя 1, синхронного генератора 3 и датчика 2 положения равно трем, двум и одному соответственно, а число фаз синхронного генератора равно трем.
Причиной появления пульсаций в измеряемом напряжении синхронного генератора 3 может являться возникновение угловых ошибок в определении момен- тов переключений выходных трапецеидальных напряжений с одной фазы на другую. Из-за дискретности работы блока 12 управления. Угловая ошибка может быть рассчитана по следующей формуле:
%ш
- число пар полюсов измерительного синхронного генератора 3; Wgj - частота вращения,
t - время между соседними импульсами с выхода фазо- сдвигающего блока 11,
где Р,
2V
где W, ; , ;
Рд, - число пар полюсов положения.
тора 3 (фиг.2), тем самым исключается возникновение пульсаций в измеряемом напряжении. Обмотки двигателя 1 (в качестве которого используется синхронный или асинхронный двигатель) питаются от усилителя 8. На валу двигателя 1 установлен датчик 2 положения. Генератор 5 вьфабатывает прямоугольные импульсы (Up) с частотой f (фиг.За), которые поступают одновременно на входы делителей 9 и 13 частоты и блока 6 согласования частот. На выходе блока 6 формируется требуемая двухфазная система напряжений для обеспечения работы датчика 2 положения в режиме фазовращателя. Частота этих напряжений равна s-s
Л исг
(где Рд и Р,. -- число пар полюсов со- соответственно двигателя и измерительного синхронного генератора).
Выходное напряжение датчика 2 положения определяется выражением (фиг.Зж)
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1987 |
|
SU1501241A1 |
| Электропривод переменного тока | 1986 |
|
SU1336189A1 |
| Электропривод с частотно-токовым управлением | 1987 |
|
SU1495973A1 |
| Устройство для управления двигателем переменного тока | 1985 |
|
SU1272461A1 |
| Устройство для управления электроприводом переменного тока | 1987 |
|
SU1495970A1 |
| Электропривод с частотно-токовым управлением | 1991 |
|
SU1781810A1 |
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1283933A1 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
| Электропривод | 1987 |
|
SU1495971A1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
Изобретение относится к электротехнике и может быть использовано в металлорежущих станках, моделирующих стендах. Целью изобретения является расширение диапазона регулируемых частот вращения путем устранения пульсаций в выходном напряжении измерительного синхронного генератора. Указанная цель достигается введением в электропривод переменного тока с бесконтактным тахогенератором переключающего узла 17, блока 18 управления, устройства 16 выборки хранения с ком 15 управления. Переключающий узел включен между формирователем 7 управляющих сигналов и коммутатором 4. Благодаря этому исключаются пульсации в напряжении на выходе синхронного генератора 3, используемого в качестве бесконтактного тахогенератора. 5 ил. § Ш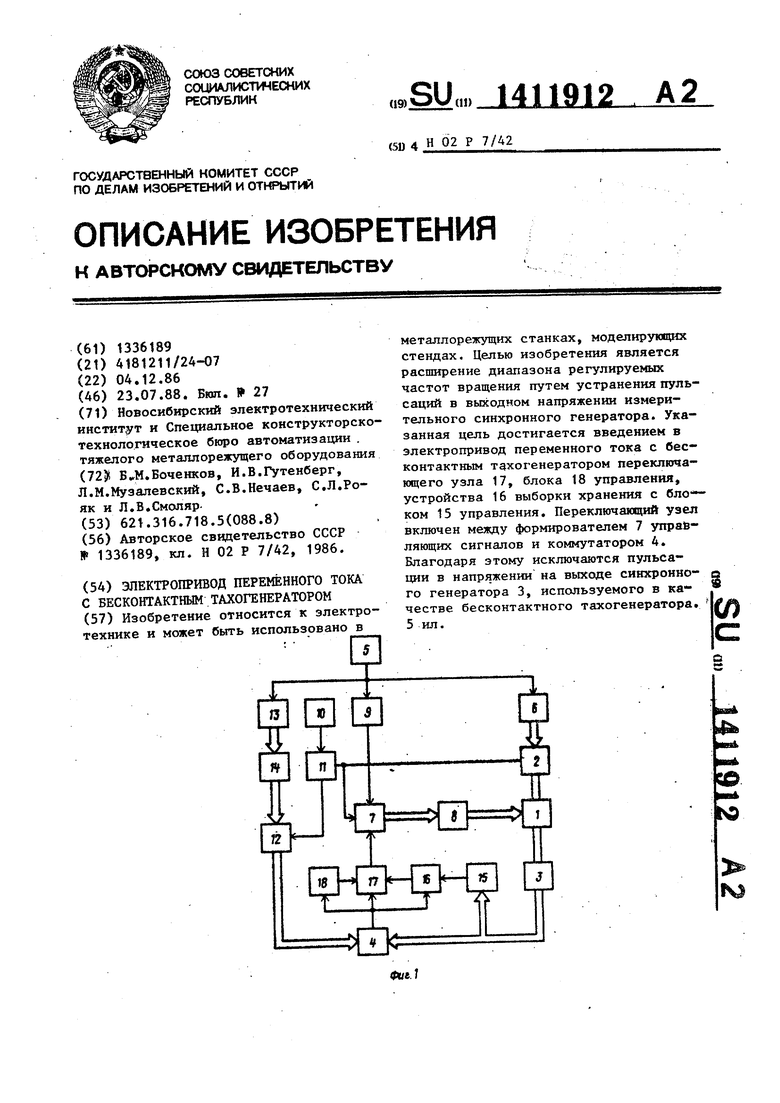
Например, при Р,
йог
2, Р
f, 2 кГц, WIP 300 рад/с, 0,3 рад или 18.
АП
Возникновение пульсащй в измеряет мом напряжении с выхода коммутатора проиллюстрировано эпюрами, приведенными на фиг.5. Величина угловых ощи- бок прямо пропорциональна частоте вращения и, начиная с некоторой, ве- личина пульсаций может оказаться недопустимой для нормального функционирования электропривода.
Электропривод переменного тока .с бесконтактным тахогенератором работает следующим образом.
Внизу диапазона, начиная с нулевой и до некоторой заданной частоты вращения, определяемой эталонным напря- жением на первом входе суммирующего компаратора в блоке 18 -управления, переключакщий узел 17 подключает выход коммутатора 4 к второму входу формирователя 7. При превышении нап- ряжения тахогенератора U. над эталонным суммирующий компаратор меняет свое состояние, переключающий узел 17 отключает выход коммутатора 4 от второго входа формирователя 7 и подклю- чает к нему выход устройства 16 выборки и хранения, в котором происходит выборка из и в моменты смены знака фазных ЭДС синхронного грнера
30
35 г
45507 55Uc, и„
,
.,sin( ,
Ы исг
где 6 - геометрический угол между осью первичной обмотки датчика 2 положения, питающейся напряжением U,
Uj.sin --(фиг.Зе), и осью
исг двигателя 1.
Коэффициенты деления делителей 9 и 13 частоты равны соответственно
(РАН- РИ.Г ) и (Рдп Р). где РЛП - чис- ло пар полюсов датчика положения. Импульсы с выхода делителя 13 частоты
fi
Ц
АЧ
с.частотой
РАП РА
(фиг.36) поступают на вход блока 14 сдвига, на выходе которого образуется многофазная система прямоугольных импульсов Ugj. той же частоты (фиг.З ,в,г,д) , причем импульсы соседних фаз сдвинуты друг относительно друга на угол , определяемьй числом фаз синхронного генератора 3 и схемной реализацией коммутатора 4. Эти импульсы поступают на информационные входы блока 12 управления. Напряжение Uj с выхода датчика 2 положения поступает на первый вход фазосдвигающего блока 11, который для согласования положений осей обмоток статора синхронного генератора 3 с осями входных обмоток датчика 2 положения, дополнительно смещают
фазу Ug на угол ct, являющийся функци ей напряжения U с выхода задатчика- 10, поступакщего на второй вход фазе- сдвигающего блока 11. В
РКСГ- Рл(Рдп -9 + об)
моменты tg
-, т.е. в моменты
и.(РАг1. 9
.. смены знака алгебраической суммы
входных напряжений фазосдвигающего блока 11с отрицательного на положи- :тельный,-на выходе указанного блока : 11 формируется импульс , (фиг.Зз), ;поступающий на управляющий вход блока 12 управления. При этом в этом блоке записьшается информация с выхода блока 14 сдвига (фиг.З и,к,и). После окончания импульса информация на выходе блока 12 управления, соответствующая моменту времени t., сохраняется до прихода следующего им-- пульса. Таким образом, на каждом из I выходов блока 12 управления формиру- ется логический сигнал (фиг.4 г,д,е)
,
I Isii
Uy. signjsinC -- tj, A A
%),
где 1 - порядковый номер выхода блока
12 управления. i Таким образом фаза сигнала
связана с углом поворота ротора коэф- :фициентом , учитываклд число пар ;полюсов синхронного генератора З, С I выхода блока 12 управления сигналы |U поступают на управляющие входы
;коммутатора Д, определяя открытое или
закрытое состояние его каналов. Горизонтальные участки трапецеидальных ЭДС 1 , Ijj Ij (вершины трапеций), соответствующих фазных обмоток синхронного генератора 3 (фиг.4а5б,в), подключенных к информационным входам коммутатора 4, передаются на его выход при соответствующих сигналах Uy,- , которые являются функциями положения ротора.
Таким образом, выходное напряжение коммутатора 4, являющееся выходным напряжением тахогенератора U. , состоит из горизонтальных участков фазных трапецеидальных ЭДС синхронного генератора 3 (фиг.4ж) и величина его прямо пропорциональна частоте вращения двигателя 1.
Напряжение тахогенератора которое является сигналом обратной связи по частоте вращения двигателя 1, поступает на второй вход формирователя 7 через переключающий узел 17 либо непосредственно, либо через уст
ройство 16 выборки и хранения. На первьш вход формирователя 7 поступает напряжение U с выхода датчика 2 положения, а на третий - напряжение с выхода делителя 9 частоты с частотой
f(
р р , преобразуемое в этом блоке
в гармонический сигнал U, той же часI
тоты. в моменты времени t
/.nL
х9 , т.е. в моменты смены знака напряжения и из отрицательнбго на положительный, в формирователе 7 производится запись напряжения Uj, соответствующего моменту времени t и хранение его до прихода следующего импульса. В результате формируются сле- йукщие напряжения:
5
о -
5
0
5
0
5
и, sin p -p----to, дг
sin P.9;
Uj cos
An исг
to, cos .
с помощью этих зависимостей произ™ водятся координатные преобразования сигналов из системы координат, сУвя- занной с ротором (в том числе сигнала задания момента, являющегося, функцией ошибки по частоте вращения) в неподвижную систему координат, связанную со статором. Выходные напряжения формирователя 7 являются управ- ЛЯ1СЯЦИМИ сигналами для усилителя 8 фазных токов.
Таким образом, введеюте в электропривод переменного тока с бесконтактным тахогенератором переключающего узла, блока управления переключающим узлом, устройства выборки и хранения и блока управления устройством выборки и хранения с соответствующими связями обеспечивает исключение пульсаций в измеряемом напряжении синхронного генератора, благодаря чему повышается Точность формирования токов статора и расширяется диапазон регу- лиpye {ыx частот вращения двигателя переменного тока в сравнении с известным решением.
Формула изобретения
Электропривод переменного тока с бесконтактным тахогенератором по авт. св. № 1336189, отличающийся тем, что, с целью расширения диапазона регулируемых частот
вращения за счет устранения пульсаций в выходном напряжении измерительного синхронного генератора, введены переключающий узел с управляющим и двумя информационными входами, блок управления переключающим узлом, устройство выборки и хранения с управляющим и информационным входами и блок управления устройством выборки и хранения,Q при этом переключающий узел по первому информационному входу и выходу подключен между выходом коммутатора : и вторым входом формирователя управ- ляющих сигналов, выход коммутатора
/.
Рис г
J
12
innnnnnnnng
подключен к входу блока управления переключающим узлом и к информационному входу устройства выборки и хранения, управляющий вход которого соединен с выходом блока управления устройством выборки и хранения, вход которого подключен к выходу измерительного синхронного генератора, выход блока управления переключающим устройством соединен с управлятцим входом переключающего устройства, а выход устройства выборки и хранения подключен к второму информационному входу переключающего устройства.
а
2Я Руст
в
1
а
i 5
УГГ
Фи&.5
| Электропривод переменного тока | 1986 |
|
SU1336189A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
