N3
О5
00
00
Изобретение относится к сельскохозяйственному машиностроению и может быть спользовано на самоходных кормоубороч- Иых комбайнах, косилках-плющилках и дру- -к уборочных маниинах.
i Цель изобретения - повышение загрузки 5 лашины.
; На фиг. 1 приведена структурная схема устройства; на фиг. 2 - блок-схема управ- ртяющего устройства; на фиг. 3 - циклограмма синхронизирующих импульсов управ- 10 ляющего устройства; на фиг. 4 - регулятор- ная характеристика двигателя. i Устройство для автоматического регу- iлиpoвaния загрузки самоходной уборочной машины содержит датчик 1 угловой скорости коленчатого вала двигателя или детали, кинематически связанной с коленчатым валом. Датчик 1 подключен к управляющему устройству 2. Преобразователь 3 подключен к выходам элементов 4 сравнения, которые подключены к выходу вычитателя 5, под- jn ключенного к выходам запоминающего уст- ройства 6. Преобразователь 3, элементы 4 сравнения, вычитатель 5 и запоминаюн1,ее устройство 6, подключенные к выходам управляющего устройства 2, образуют блок
комбайне КСК-ЮО переключатель 13 смонтирован на педали для уменьшения скорости комбайна, а переключатель 14 - на педали для увеличения скорости комбайна.
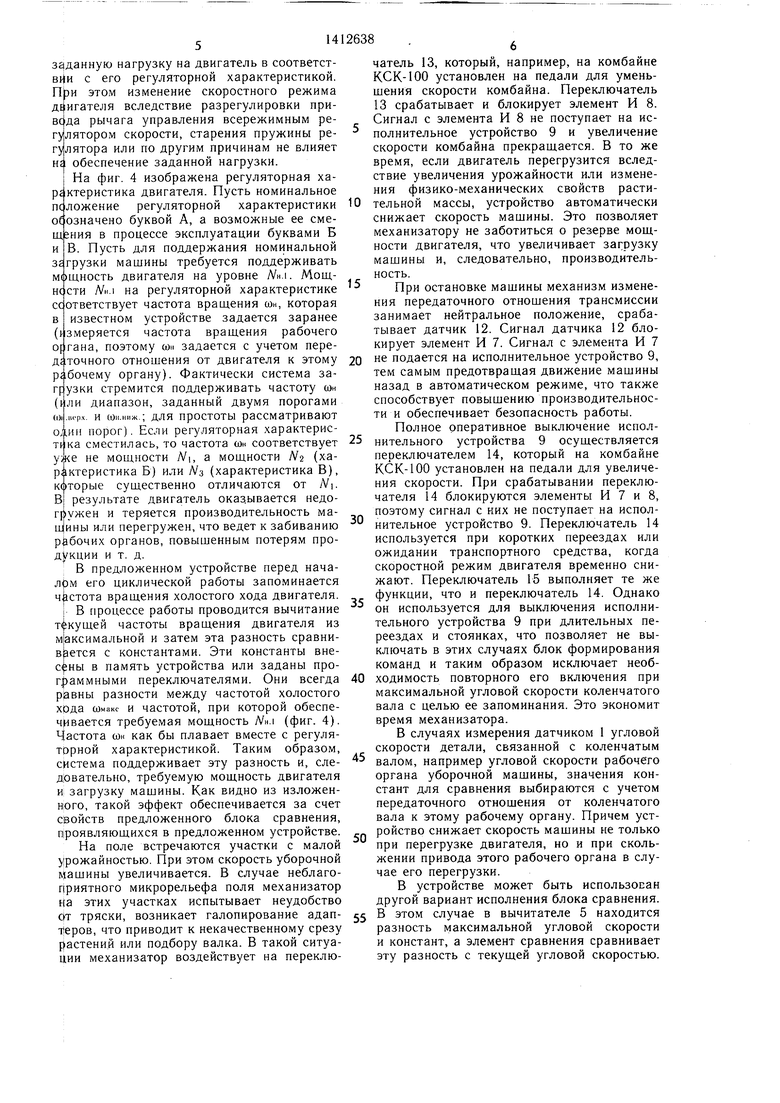
Управляющее устройство (фиг. 2) состоит из коммутатора 16, формирователя 17 временных интервалов, задатчика 18 констант. Один вход коммутатора 16 связан с датчиком 1 угловой скорости коленчатого вала двигателя, другой вход (управляющий) - с формирователем 17 временных интервалов. Выходы коммутатора 16 связаны с входом запоминающего устройства 6 и одним из входов вычитателя 5. Выход формирователя 17 временных интервалов, связанный с входом коммутатора 16, допол- 5 нительно связан с входом преобразователя 3, другой - с управляющими входами вычитателя 5 и элемента 4 сравнения. Выход задатчика 18 констант связан с другим входом элементов 4 сравнения.
Коммутатор 16 выполняется, например, на управляемых логических вентилях.
Формирователь 17 временных интервалов выполняется, например, на базе кварцевого генератора и включенной последовательно с ним линейки делителей. Задатчик 18 конформирования команд. К выходам преобра- 25 стант выполняется, например, на базе программного переключателя.
Устройство управления работает следующим образом.
При вращении маховика двигателя его зубья пересекают магнитное поле датчика
зователя 3 подключены элементы И 7 и 8. К выходу элемента И 7 подключена сек- |ция исполнительного устройства 9, обес- нечивающая уменьшение скорости движения машины, а к выходу элемента
И 8 - секция исполнительного устройства 9, и формируют в нем электрические импульсы.
;обеспечивающая увеличение скорости дви- |жения ма1пины. Механизм И) изменения I передаточного отношения трансмиссии свя- 1зан с исполнительным устройством 9 и ор- |гаиами 11 ручного управления. Механизм 10 iизменения передаточного отношения транс- Эмиссии снабжен датчиком 12 его нейтрального положения, подключенным к входу элемента И 7. Органы 11 ручного управления снабжены переключателем 13, подключенным к входу элемента И 8. Устройство снабжено также переключателями 14 и 15, подключенными к элементам И 7 и 8.
В устройстве использован бесконтактный магпитоиндукционный датчик 1, установленный в люке напротив зубьев .маховика
частота которых пропорциональна угловой скорости коленчатого вала двигателя. Сигнал с датчика поступает на коммутатор 16. После подачи питания на устройство формирователь 17 временных интервалов
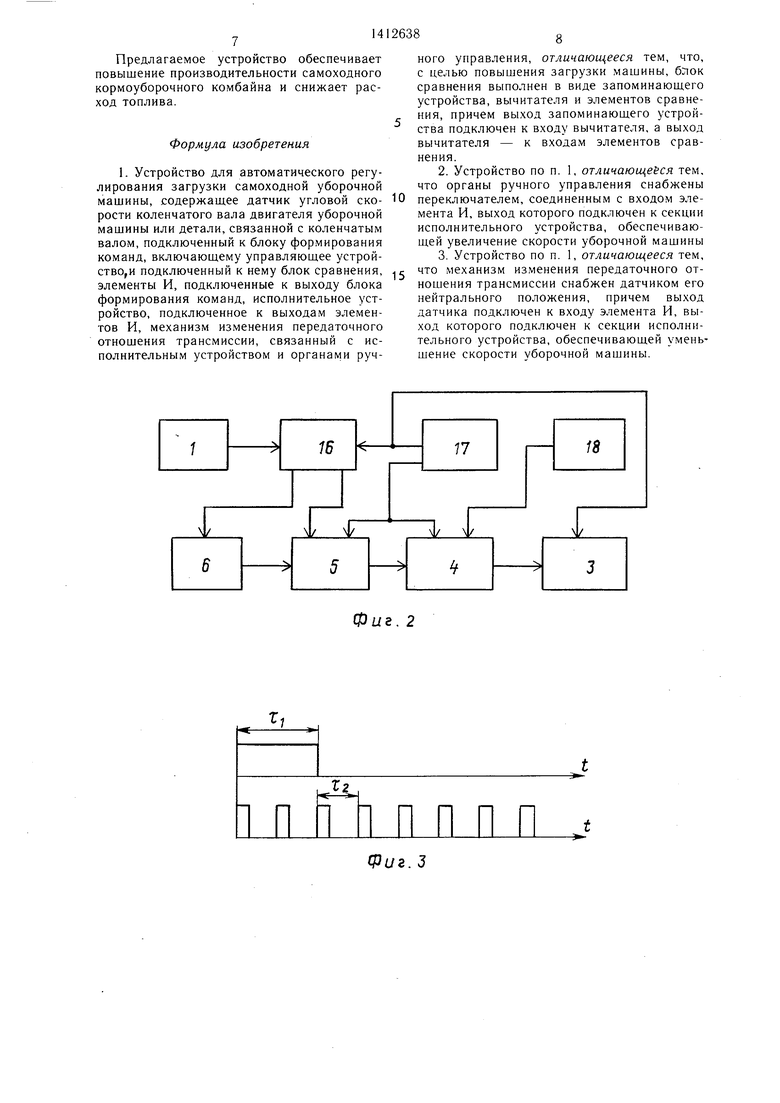
35 формирует одиночный импульс продолжительностью Т| (фиг. 3), который поступает на коммутатор 16. На время прохождения этого и.мпульса коммутатор 16 соединяет выход датчика 1 с запоминающим устрой40 ством 6, которое запоминает число импульсов, прищедших с датчика 1 за время Т|. Этот же импульс поступает на преобразователь 3 и блокирует его работу. После окончания импульса (его задним фронтом) капал, соединяющий датчик 1 с запоминаю50
двигателя. При измерении угловой скорости 5 щим устройством 6, закрывается, преобразователь 3 разблокируется, датчик 1 через коммутатор 16 соединяется с вычитателем 5. Непрерывная последовательность синхроимпульсов с периодом Т2 (фиг. 3) с другого выхода формирователя 17 временных интервалов поступает на управляющие входы вычитателя 5 и элементов 4 сравнения. При поступлении синхроимпульса на вычитатель 5 происходит перезапись числа из запоминающего устройства 6 в вычитатель 5 и вычитание из этого числа каждый раз единицы по мере прихода на вычитатель 5 импульсов с датчика 1. Элемент 4 сравнения каждый раз сравнивает содержимое вычидеталеи, кинематически связанных с коленчатым валом двигателя, датчик 1 может быть установлен в других местах. Может быть использован также другой тип датчика, например фотоэлектрический. Элементы, входящие в блок формирования команд, и элементы И выполнены с использованием интегральных микросхем. В этих целях может быть также использован микропроцессор. Переключатели 13 и 14 целесообразно располагать непосредственно на деталя.х органов ручного управления, на которые механизатор воздействует при ручном управлении. Например, на самоходном кормоуборочном
55
0 n
комбайне КСК-ЮО переключатель 13 смонтирован на педали для уменьшения скорости комбайна, а переключатель 14 - на педали для увеличения скорости комбайна.
Управляющее устройство (фиг. 2) состоит из коммутатора 16, формирователя 17 временных интервалов, задатчика 18 констант. Один вход коммутатора 16 связан с датчиком 1 угловой скорости коленчатого вала двигателя, другой вход (управляющий) - с формирователем 17 временных интервалов. Выходы коммутатора 16 связаны с входом запоминающего устройства 6 и одним из входов вычитателя 5. Выход формирователя 17 временных интервалов, связанный с входом коммутатора 16, допол- 5 нительно связан с входом преобразователя 3, другой - с управляющими входами вычитателя 5 и элемента 4 сравнения. Выход задатчика 18 констант связан с другим входом элементов 4 сравнения.
Коммутатор 16 выполняется, например, на управляемых логических вентилях.
Формирователь 17 временных интервалов выполняется, например, на базе кварцевого генератора и включенной последовательно с ним линейки делителей. Задатчик 18 кончастота которых пропорциональна угловой скорости коленчатого вала двигателя. Сигнал с датчика поступает на коммутатор 16. После подачи питания на устройство формирователь 17 временных интервалов
5 формирует одиночный импульс продолжительностью Т| (фиг. 3), который поступает на коммутатор 16. На время прохождения этого и.мпульса коммутатор 16 соединяет выход датчика 1 с запоминающим устрой0 ством 6, которое запоминает число импульсов, прищедших с датчика 1 за время Т|. Этот же импульс поступает на преобразователь 3 и блокирует его работу. После окончания импульса (его задним фронтом) капал, соединяющий датчик 1 с запоминаютателя с содержимым задатчика 18. В момент прихода на вычитатель 5 и элементы 4 сравнения следующего синхроимпульса результат сравнения запоминается буферным устройством преобразователя 3, происходит перезапись числа из запоминающего устройства 6 Б вычитатель 5, процессы вычитания и сравнения повторяются. Таким образом, организуется циклическая работа устройства.
В вышеприведенном примере время цикла постоянное и определяется периодом следования Т2 синхроимпульсов. Такой вариант организации цикла целесообразно использовать, когда частота следования импульсов с датчика велика, например в случае установки датчика напротив зубьев маховика двигателя. Если требуется контролировать частоту вращения тихоходных валов (в этом случае частота следования импульсов с датчика мала), например валов рабочих органов, кинематически связанных с двигателем, то целесообразно организовать цикл по другому. В другом варианте исполнения управляющее устройство состоит из -тех же вышеописанных элементов. Однако коммутируются эти элементы так, что в качестве синхроимпульсов используются импульсы датчика. В таком варианте исполнения запоминающее устройство после включения питания запоминает один раз число импульсов, поступивших с формирователя временных интервалов за период между импульсами датчика. Затем по мере поступления импульсов с датчика периодически происходит перезапись запомненного числа в вычитатель, вычитание в вычитателе из перезаписанного числа импульсов, поступивших с формирователя временных интервалов за период импульса датчика, сравнение в элементах сравнения результата вычитания с константами задатчика. Т. е. цикл организован так же, как и в первом варианте исполнения, с той лишь разницей, что синхронизирующие импульсы поступают в датчик, а арифметические и логические операции производятся с числом импульсов, поступивших с формирователя временных интервалов.
При включении блока формирования команд в начале его работы сигнал с датчика 1, преобразованный управляющим устройством 2, подается на запоминающее устройство 6, где запоминается его среднее значение угловой скорости и принимается за максимально, поэтому включение блока формирования команд производится при максимальной угловой скорости холостого хода коленчатого вала двигателя. После запоминания максимальной угловой скорости начинается циклическая работа блока формирования команд.
При выполнении уборочной машиной технологического процесса ее двигатель нагружается и угловая скорость его коленчатого вала уменьшается. Сигнал о текущем
значении угловой скорости преобразуется управляющим устройством 2 и поступает в вычитатель 5, где вычисляется разность максимальной и текущей угловых скоростей.
Эта разность сравнивается элементами 4 сравнения с константами, заданными задат- чиком управляющего устройства 2. Если угловая скорость коленчатого вала отличается от максимальной на величину, меньшую константы, определяющей верхний порог
0 срабатывания блока формирования команд, на выходе элементов 4 сравнения появляется сигнал, который через преобразователь 3 подается на элемент И 8. Элемент И 8 открывается. По сигналу этого элемента сраг батывает секция исполнительного устройства 9, обеспечивающая увеличение скорости комбайна. Исполнительное устройство 9 воздействует на механизм 10 изменения передаточного отношения трансмиссии и скорость мащины увеличивается. Подача рас0 тительной массы на рабочие органы мащины увеличивается, при этом на двигатель поступает больщая нагрузка и угловая скорость его коленчатого вала уменьщается. Как только разность максимальной и текуj- щей угловых скоростей коленчатого вала становится равной заданной константе, сигнал на выходе элементов 4 сравнения исчезает и увеличение скорости машины прекращается. При увеличении урожайности количество растительной массы, поступаю0 щей на рабочие органы, увеличивается. Нагрузка на двигатель мащины также увеличивается, угловая скорость его коленчатого вала уменьшается. Как только угловая скорость отличается от максимальной на величину, большую константы, определяющей
5 нижний порог срабатывания блока формирования команд, на выходе элементов 4 сравнения появляется сигнал, который через преобразователь 3 подается на элемент И 7. Элемент И 7 открывается. По сигналу этого элемента срабатывает секция исполнитель0 ного устройства 9, обеспечивающая уменьшение скорости комбайна. Устройство 9 воздействует на механизм 10 изменения передаточного отношения трансмиссии, и скорость машины уменьшается. Подача расти- J. тельной массы на рабочие органы машины уменьшается. Нагрузка на двигатель также уменьщается, а угловая скорость его коленчатого вала увеличивается. Как только разность максимальной и текущей угловых скоростей коленчатого вала становится равной
Q заданной константе, сигнал на выходе элементов 4 сравнения исчезает, и уменьщение скорости машины прекращается. Изменение констант осуществляется задатчиком, которым снабжено управляющее устройство 2. Таким образом, устройство поддерживает
5 угловую скорость коленчатого вала двигателя в диапазоне, заданном относительно максимальной угловой скорости холостого хода коленчатого вала, и следовательно.
зг|данную нагрузку на двигатель в соответствии с его регуляторной характеристикой. При этом изменение скоростного режима двигателя вследствие разрегулировки при- вС|да рычага управления всережимным регулятором скорости, старения пружины регулятора или по другим причинам не влияет обеспечение заданной нагрузки.
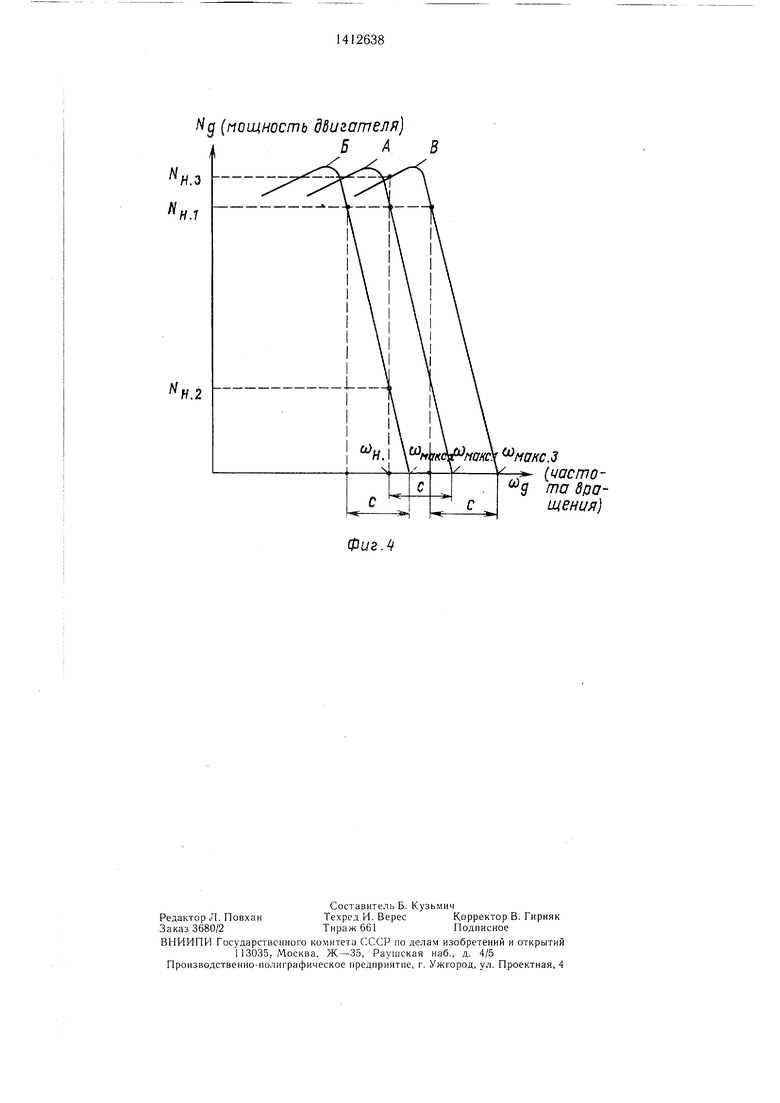
На фиг. 4 изображена регуляторная хаР
ктеристика двигателя. Пусть номинальное
В
пс1ложение регуляторной характеристики обозначено буквой А, а возможные ее смещения в процессе эксплуатации буквами Б В. Пусть для поддержания номинальной грузки машины требуется поддерживать мощность двигателя на уровне Мнл. Мош,- нс сти /Vii.i на регуляторной характеристике соответствует частота вращения шн, которая в известном устройстве задается заранее (змepяeтcя частота вращения рабочего ofraHa, поэтому ши задается с учетом передаточного отношения от двигателя к этому
Р
грузки стремится поддерживать частоту шн ли диапазон, заданный двумя порогами ворх. и С01М1ИЖ.; для простоты рассматривают ИИ порог). Если регуляторная характеристика сместилась,то частота шн соответствует у;ке не мощности N, а мощности yV2 (ха- ктеристика Б) или /Уз (характеристика В), которые существенно отличаются от jVi
бочему органу). Фактически система зарезультате двигатель оказывается недогружен и теряется производительность ма- щины или перегружен, что ведет к забиванию рабочих органов, повышенным потерям продукции и т. д.
В предложенном устройстве перед нача- лрм его циклической работы запоминается частота вращения холостого хода двигателя. В процессе работы проводится вычитание т(кущей частоты вращения двигателя из максимальной и затем эта разность сравнивается с константами. Эти константы внесены в память устройства или заданы про- г|)аммными переключателями. Они всегда равны разности между частотой холостого хода сомакс и частотой, при которой обеспечивается требуемая мощность A/H.I (фиг. 4). Частота шн как бы плавает вместе с регуляторной характеристикой. Таким образом, система поддерживает эту разность и, следовательно, требуемую мощность двигателя и загрузку мащины. Как видно из изложенного, такой эффект обеспечивается за счет свойств предложенного блока сравнения, проявляющихся в предложенном устройстве.
На поле встречаются участки с малой урожайностью. При этом скорость уборочной машины увеличивается. В случае неблагоприятного микрорельефа поля механизатор на этих участках испытывает неудобство cfT тряски, возникает галопирование адап- т|еров, что приводит к некачественному срезу растений или подбору валка. В такой ситуации механизатор воздействует на переключатель 13, который, например, на комбайне КСК-100 установлен на педали для умень- щения скорости комбайна. Переключатель 13 срабатывает и блокирует элемент И 8. Сигнал с элемента И 8 не поступает на исполнительное устройство 9 и увеличение скорости комбайна прекращается. В то же время, если двигатель перегрузится вследствие увеличения урожайности или изменения физико-механических свойств расти0 тельной массы, устройство автоматически снижает скорость мащины. Это позволяет механизатору не заботиться о резерве мощности двигателя, что увеличивает загрузку машины и, следовательно, производительность.
При остановке мащины механизм изменения передаточного отнощения трансмиссии занимает нейтральное положение, срабатывает датчик 12. Сигнал датчика 12 блокирует элемент И 7. Сигнал с элемента И 7
0 не подается на исполнительное устройство 9, тем самым предотвращая движение мащины назад в автоматическом режиме, что также способствует повыщению производительности и обеспечивает безопасность работы. Полное оперативное выключение испол5 нительного устройства 9 осуществляется переключателем 14, который на комбайне КСК-100 установлен на педали для увеличения скорости. При срабатывании переключателя 14 блокируются элементы И 7 и 8, поэтому сигнал с них не поступает на испол нительное устройство 9. Переключатель 14 используется при коротких переездах или ожидании транспортного средства, когда скоростной режим двигателя временно снижают. Переключатель 15 выполняет те же функции, что и переключатель 14. Однако он используется для выключения исполнительного устройства 9 при длительных переездах и стоянках, что позволяет не выключать в этих случаях блок формирования команд и таким образом исключает необ0 ходимость повторного его включения при максимальной угловой скорости коленчатого вала с целью ее запоминания. Это экономит время механизатора.
В случаях измерения датчиком 1 угловой скорости детали, связанной с коленчатым
валом, например угловой скорости рабочего органа уборочной мащины, значения констант для сравнения выбираются с учетом передаточного отношения от коленчатого вала к этому рабочему органу. Причем уст- ройство снижает скорость машины не только при перегрузке двигателя, но и при скольжении привода этого рабочего органа в случае его перегрузки.
В устройстве может быть использован другой вариант исполнения блока сравнения.
5 В этом случае в вычитателе 5 находится разность максимальной угловой скорости и констант, а элемент сравнения сравнивает эту разность с текущей угловой скоростью.
5
Предлагаемое устройство обеспечивает повышение производительности самоходного кормоуборочного комбайна и снижает расход топлива.
Формула изобретения
1. Устройство для автоматического регулирования загрузки самоходной уборочной машины, содержащее датчик угловой скорости коленчатого вала двигателя уборочной машииы или детали, связанной с коленчатым валом, подключенный к блоку формирования команд, включающему управляющее устрой- ство,и подключенный к нему блок сравнения, элементы И, подключенные к выходу блока формирования команд, исполнительное устройство, подключенное к выходам элементов И, механизм изменения передаточного отношения трансмиссии, связанный с исполнительным устройством и органами ручного управления, отличающееся тем, что, с целью повышения загрузки машины, блок сравнения выполнен в виде запоминающего устройства, вычитателя и элементов сравнения, причем выход запоминающего устройства подключен к входу вычитателя, а выход вычитателя - к входам элементов сравнения.
2.Устройство по п. 1, отличающегося тем, что органы ручного управления снабжены
0 переключателем, соединенным с входом элемента И, выход которого подключен к секции исполнительного устройства, обеспечивающей увеличение скорости уборочной машины
3.Устройство по п. 1, отличающееся тем, г что механизм изменения передаточного отношения трансмиссии снабжен датчиком его нейтрального положения, причем выход датчика подключен к входу элемента И, выход которого подключен к секции исполнительного устройства, обеспечиваюшей уменьшение скорости уборочной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления загрузкой самоходной уборочной машины | 1989 |
|
SU1743450A1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ МАСТЕРСТВА ВОЖДЕНИЯ ОПЕРАТОРА БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1997 |
|
RU2123724C1 |
| Устройство для автоматического контроля и управления самоходной уборочной машиной | 1977 |
|
SU701569A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ПОЧВЫ | 2013 |
|
RU2535102C1 |
| Устройство для измерения мощности цилиндров двигателя внутреннего сгорания | 1983 |
|
SU1183846A1 |
| Способ определения цикловой подачи топлива и устройство для его осуществления | 2015 |
|
RU2665566C2 |
| Устройство для измерения мощности и герметичности цилиндров двигателля внутреннего сгорания | 1987 |
|
SU1493897A1 |
| Способ определения цикловой подачи топлива в дизельном двигателе и устройство для его осуществления | 2021 |
|
RU2775798C1 |
Изобретение относится к сельскохозяйственному машиностроению. Целью изобретения является повышение загрузки машины. Сигнал о текущем значении угловой скорости коленчатого вала с датчика 1, преобразованный управляющим устройством (УУ) 2, подается на запоминающее устройство 6, где запоминается его среднее значение за время, заданное УУ 2. Это значение при холостом ходе коленчатого вала принимается за максимальное. При нагружении двигателя сигнал датчика 1 поступает в вы- читатель 5, где вычисляется разность максимальной и текущей угловых скоростей, которая сравнивается элементами 4 с константами, заданными задатчиком УУ. Если угловая скорость коленчатого вала отличается от максимальной на величину, меньшую заданной константы, на выходе элементов 4 сравнения появляется сигнал, который через преобразователь 3 подается на элемент И 7 или И 8, последний открывается и срабатывает соответствующая секция исполнительного устройства 9, воздействующего на механизм 10 изменения передаточного отношения. 2 з. п. ф-лы, 4 ил. (О (Л
1 П П П П П П П л
Ipue. 2
. 3
Ngf (мощность двигателя)
5 А В
Фиг.
WATY мамс.З
(иасто- д та вращения)
| Устройство автоматического регулирования загрузки зерноуборочного комбайна | 1976 |
|
SU745417A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
