оо со
о
О5
Изобретение относится к машиностроению, в частности к пневмогидравлическим исполнительным механизмам, и может быть использовано в приводах механизмов и машин для перемеш,ения рабочего органа.
Цель изобретения - автоматизация управления цилиндром.
На чертеже представлена схема силового цилиндра.
Силовой цилиндр содержит корпус 1, в
жину 11. Возрастаюш,ее давление одновременно действует на поршень 8, преодолевает усилие пружины 6 и прижимает защелку 7 к штоку 3, а при прохождении мимо канавки 4 вводит защелку 7 в нее. После этого на перемешаемый предмет действует полное усилие поршня 5 и штока 3 цилиндра и перемещает его
После сброса управляющего давления из полости 2 вся подвижная система под
котором с образованием рабочей полости 2 Ю действием пружин 11 и 12 возвращается на- установлен шток 3 с канавками 4, плаваю-зад, а пружина 6 выводит защелку 7 из кащий поршень 5 и механизм фиксации поршня 5 относительно штока 3, выполненный в виде поджатой пружиной 6 защелки 7 с поршнем 8, полость 9 управления которой
сообщена каналом 10 с полостью 2. Поршень 5 и шток 3 раздельно подпружинены относительно корпуса 1 пружинами 11 и 12, причем жесткость пружины 11 больше жесткости пружины 12. Подвод среды в полость 2 производится через,штуцер 13.20
Силовой цилиндр работает следующим образом.
При подаче управляющего давления через штуцер 13 повышается давление в полости 2 и перемещается шток 3 до упора в 25 полость его уравнения сообщена с рабочей перемещаемый предмет. При дальнейшемполостью цилиндра, а поршень и щток подповышении давле-ния после остановки што-пружинены относительно корпуса, при этом
ка 3 усилие на поршне 5 возрастает и пе-жесткость пружины поршня больше жестремещаёт его вд,оль штока 3, сжимая пру-кости пружины штока.
навки 4. Требуемая синхронность обеспечивается выбором сечения канала 10.
Формула изобретения
Силовой цилиндр, содержащий корпус, в котором с образованием рабочей полости установлены шток с канавкой, плавающий поршень, механизм фиксации поршня относительно штока, взаимодействующий с канавками штока, отличающийся тем, что, с целью автоматизации управления цилинд- . ром, механизм фиксации снабжен пружиной и выполнен гидравлически управляемым.
жину 11. Возрастаюш,ее давление одновременно действует на поршень 8, преодолевает усилие пружины 6 и прижимает защелку 7 к штоку 3, а при прохождении мимо канавки 4 вводит защелку 7 в нее. После этого на перемешаемый предмет действует полное усилие поршня 5 и штока 3 цилиндра и перемещает его
После сброса управляющего давления из полости 2 вся подвижная система под
действием пружин 11 и 12 возвращается на- зад, а пружина 6 выводит защелку 7 из ка действием пружин 11 и 12 возвращается на- зад, а пружина 6 выводит защелку 7 из ка полость его уравнения сообщена с рабочей полостью цилиндра, а поршень и щток поднавки 4. Требуемая синхронность обеспечивается выбором сечения канала 10.
Формула изобретения
Силовой цилиндр, содержащий корпус, в котором с образованием рабочей полости установлены шток с канавкой, плавающий поршень, механизм фиксации поршня относительно штока, взаимодействующий с канавками штока, отличающийся тем, что, с целью автоматизации управления цилинд- . ром, механизм фиксации снабжен пружиной и выполнен гидравлически управляемым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Силовой цилиндр | 1985 |
|
SU1307108A1 |
| Силовой цилиндр | 1986 |
|
SU1498988A1 |
| Силовой цилиндр | 1987 |
|
SU1483122A1 |
| Силовой цилиндр | 1989 |
|
SU1751451A1 |
| Силовой цилиндр | 1987 |
|
SU1789790A1 |
| Силовой цилиндр | 1987 |
|
SU1518575A1 |
| Пневматический (гидравлический) цилиндр | 1980 |
|
SU924434A1 |
| АВТОМАТИЧЕСКАЯ ПРИСТАВКА К ИСПЫТАТЕЛЮ ПЛАСТОВ НА ТРУБАХ | 1991 |
|
RU2046939C1 |
| Силовой цилиндр | 1986 |
|
SU1384845A1 |
| Силовой цилиндр с осевой фиксацией штока | 1989 |
|
SU1649132A1 |
Изобретение м.б. использовано в приводах механизмов и машин для перемещения рабочего органа. Цель изобретения - автоматизация управления цилиндром. Для этого механизм фиксации снабжен пружиной и выполнен гидравлически управляемым. Полость 9 его управления сообщена с рабочей полостью 2 цилиндра каналом 10, а поршень 5 и шток 3 выполнены подпружиненными относительно корпуса I. Жесткость пружины И поршня 5 больше жесткости пружины 12 штока 3. При подаче управляющего давления на перемещаемый предмет хТ,ействует полное усилие поршня 5 и штока 3 цилиндра и перемещает его. После сброса давления вся подвижная система под действием пружин возвращается назад. Требуемая синхронность обеспечивается выбором сеченил канала 10. 1 ил.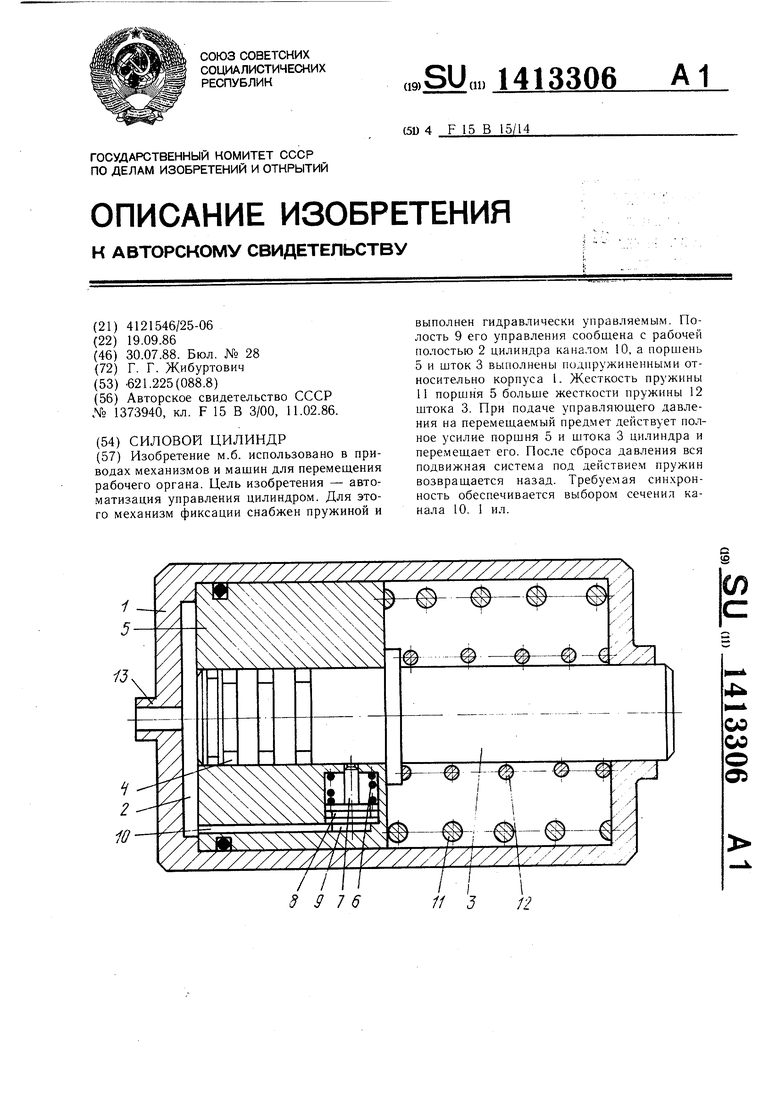
| Гидравлическая система с мультипликатором | 1986 |
|
SU1373940A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
