CO
itib
Изобретение относится к измерительной технике и может быть использовано для бесконтактного измерения перемещений светоотражающего объекта в плоскости, нормальной к его поверхности, .
Цель изобретения - повышение точности измерения перемещения путем исключения погрешности, обусловленной изменением расстояния до объекта вследствие его перемещения, и погрешности, обусловленной смещением при этом точки отсчета, по которой определяется перемещение.
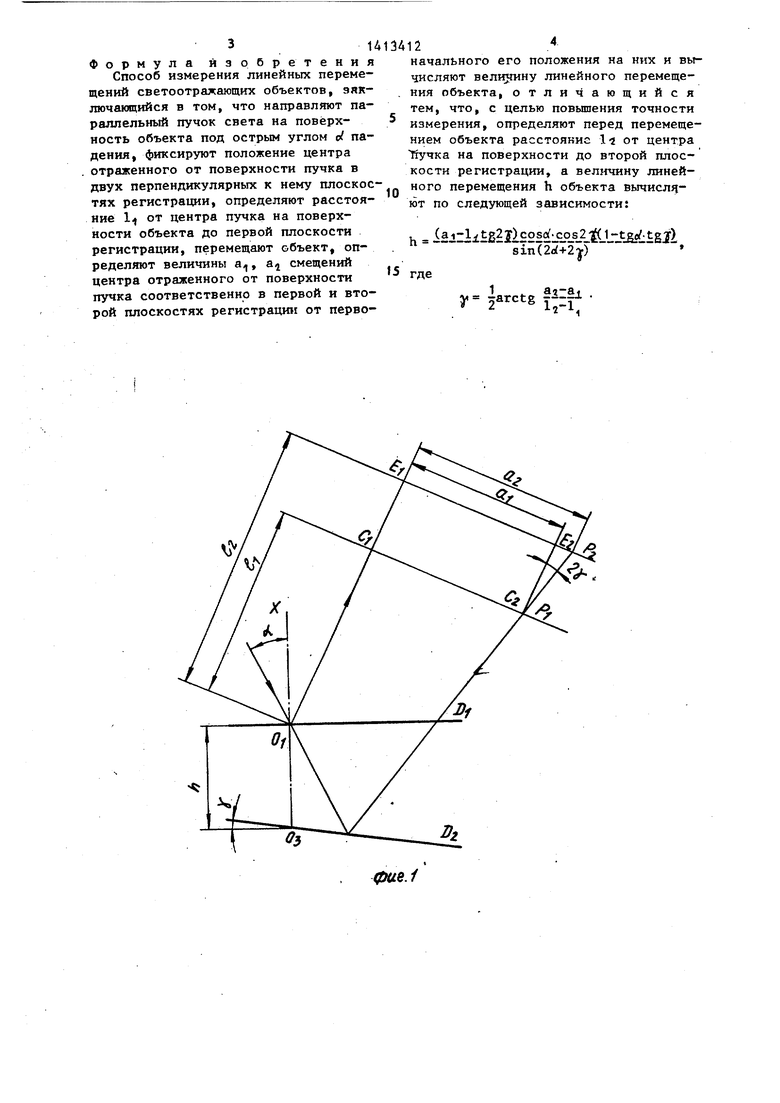
На фиг.1 изображена схема, поясняющая предлагаемый способ измерения, на фиг.2 - принципиальная схема устройства, реализующего данный способ.
Устройство содержит осветитель 1, каретки 2, 3, делительную головку 4, блок 5 регистрации, основание (не показано) . Осветитель 1 закреплен на каретке 2, установленной на делительной головке 4, выполненной в виде полудиска. Блок 5 регистра;ции закреплен на каретке 3, также установленной на делительной головке 4. Каретки 2, 3 установлены на делительной
10
15
щают вместе с кареткой 3 до тех по пока отраженный от поверхности объекта 10 пучок света не станет перпендикулярен плоскостям пл тин 7, 8, что определяется с помощ окуляра 9 при совпадении положений световых пятен на полупрозрачных пластинах 7, 8. Затем блок 5 регис рации также закрепляют на основани Координаты С и С положения центр световых пятен, соответствующих от раженному от объекта 10 световому пучку в плоскостях Р, и Р соо твет
ственно пластин 7, 8, при этом фик сируются.
Расстояния 1, и 1 от точки 0 ражения светового пучка соответств о до плоскостей пластин 7, 8 такж
20 фиксируются при первоначальном пол жении объекта 10. Таким образом, о ветитель 1 и блок 5 регистрации жестко закреплены на основании. За тем убирают делительную головку
25 перемещают объект 10. При перемеще нии объекта 10 изменяется положени его поверхности из D , в П и, соот ветственно, положение центров С и Е световых пятен соответственно в
головке 4 с возможностью перемещения 30 плоскостях Р и Р полупрозрачных
пластин 7, 8. Перемещение h объекта 10 определяется по нормали к поверхности объекта в точке О ц ра светового пятна при первоначаль
, (a,-litg2l)cosef cos2 J(1-t of-tgj) n
sin( + 2y)
no образующей (не показана). Блок 5 регистрации содержит корпус 6 и установленные в нем две тонкие полупрозрачные пластины 7,8с нанесенными на них координатными сетками и окуляр 9.35 положении объекта 10 по формуле Блок 5 регистрации закреплен на каретке 3 так, что при ее движении по делительной головке 4 в любой момент плоскости полупрозрачных пластин 7, 8 нормальны к радиусу полудиска. 40
Способ измерения линейных перемещений светоотражающих объектов осуществляют с помощью данного устройства следующим образом.
Осветитель 1 формирует параллель- дд ный пучок света. Делительную головку 4 устанавливают на поверхности объекта 10, перемещение которого измеряют так, что центральный луч параллельного пучка света от осветителя 1 лежит в плоскости, перпендикулярной поверхности объекта 10, и пересекает эту поверхность в заданной точке 0 . Перемещая каретку 2 с осветителем 1, задают по делительной „ головке А острый угол с( падения пучка на поверхность объекта 10, после чего осветитель 1 закрепляют на основании. Блок 5 регистра1ши переме50
1 7 jarctB .
Формула получается из рассмотре геометрии оптического хода падающе и отраженного лучей, координат пол жения центров пятен, соответствующ пересечению отраженного пучка в пе рой PI и второй Р плоскостях реги рации при первоначальном D и пере щенном DJ положениях объекта 10. Ч рез окуляр 9 по координатной стенк на пластине 7 определяют изменение
C.Cj
положения центра светово
пятна в первой плоскости Р регист ции. Так же определяют изменение а положения центра светового пятна во,второй плоскости Р регис рации.
щают вместе с кареткой 3 до тех пор, пока отраженный от поверхности объекта 10 пучок света не станет перпендикулярен плоскостям пластин 7, 8, что определяется с помощью окуляра 9 при совпадении положений световых пятен на полупрозрачных пластинах 7, 8. Затем блок 5 регистрации также закрепляют на основании. Координаты С и С положения центров световых пятен, соответствующих отраженному от объекта 10 световому пучку в плоскостях Р, и Р соо тветственно пластин 7, 8, при этом фиксируются.
Расстояния 1, и 1 от точки 0 отражения светового пучка соответствен- о до плоскостей пластин 7, 8 также
фиксируются при первоначальном положении объекта 10. Таким образом, осветитель 1 и блок 5 регистрации жестко закреплены на основании. Затем убирают делительную головку и
перемещают объект 10. При перемещении объекта 10 изменяется положение его поверхности из D , в П и, соответственно, положение центров С и. Е световых пятен соответственно в
лоскостях Р и Р полупрозрачных
пластин 7, 8. Перемещение h объекта 10 определяется по нормали X к поверхности объекта в точке О центра светового пятна при первоначальном
положении объекта 10 по формуле
, (a,-litg2l)cosef cos2 J(1-t of-tgj) n
sin( + 2y)
положении объекта 10 по формуле
положении объекта 10 по формуле
1 7 jarctB .
Формула получается из рассмотрения геометрии оптического хода падающего и отраженного лучей, координат полоения центров пятен, соответствующих пересечению отраженного пучка в пер- рой PI и второй Р плоскостях регистрации при первоначальном D и перемеенном DJ положениях объекта 10. Через окуляр 9 по координатной стенке на пластине 7 определяют изменение
C.Cj
положения центра светового
пятна в первой плоскости Р регистрации. Так же определяют изменение а положения центра светового пятна во,второй плоскости Р регистрации.
Формула изобретения Способ измерения линейных перемещений светоотражающих объектов, заключающийся в том, что направляют параллельный пучок света на поверхность объекта под острым углом с/ падения, фиксируют положение центра отраженного от поверхности пучка в двух перпендикулярных к нему плоскостях регистрации, определяют расстояние 1 от центра пучка на поверхности объекта до первой плоскости регистрации, перемещают объект, определяют величины а, а смещений центра отраженного от поверхности пучка соответственно в первой и второй плоскостях регистрации от перво13A12
начального его положения на них и вычисляют вели}шну линейного перемещения объекта, отличающийся тем, что, с целью повышения точности измерения, определяют перед перемещением объекта расстояние 1 от центра fiy4Ka на поверхности до второй плоскости регистрации, а величину линейного перемещения h объекта вычисл - ют по следующей зависимости:
10
(а i3litg2 J) cosof. cos 2-J 1-tgc/. tg j) sin(2d+2f
где
Лд S -«J.
у i,i
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бесконтактного определения размера деталей | 1980 |
|
SU938004A1 |
| Способ бесконтактного определения размера детали | 1989 |
|
SU1640533A1 |
| Устройство для измерения диаметра вала | 1984 |
|
SU1254291A1 |
| ИНТЕРФЕРОМЕТР ДЛЯ КОНТРОЛЯ ТЕЛЕСКОПИЧЕСКИХ СИСТЕМ И ОБЪЕКТИВОВ | 2012 |
|
RU2518844C1 |
| УЧЕБНЫЙ ОПТИЧЕСКИЙ ИНТЕРФЕРОМЕТР | 1998 |
|
RU2154307C2 |
| ОПТИЧЕСКИЙ МИКРОИНТЕРФЕРОМЕТР | 2000 |
|
RU2198379C2 |
| Способ определения радиусов кривизны сферических поверхностей и устройство для его осуществления | 1988 |
|
SU1562691A1 |
| Устройство для измерения продольных аберраций окуляров микроскопов | 1986 |
|
SU1428970A1 |
| Оптоэлектронное устройство для измерения линейных размеров | 1980 |
|
SU938019A1 |
| Устройство для контроля формы вогнутых асферических поверхностей | 1974 |
|
SU657240A1 |

Изобретение относится к измерительной технике и может быть использовано для бесконтактного измерения перемещений светоотражающего объекта в плоскости, нормальной его поверхности. Цель изобретения - повьшенне точности измерения перемещения путем исключения погрешности, обусловленной изменением расстояния до вследствие его перемещениями погрешности, обусловленной смещением точки отсчета, по которой определяется перемещение. Направляют параллельный пучок света на поверхность объекта под острым углом падения . Фиксируют положение центра отраженного от поверхности пучка в двух перпендикулярных к нему плоскостях регистрации, определяют расстояние , от центра пучка на контролируемой поверхности до первой плоскости регистрации перед перемещением контролируемой поверхности, а после перемещения контролируемой поверхности определяют величины а., а смещений центра отраженного от нее пучка в обеих плоскостях регистрации от первоначального его положения на них, п перед перемещением контролируемой поверхности определяют расстояние 1 до второй плоскости регистрации от центра пучка на контролируемой поверхности, а величину h перемещения контролируемой поверхности вычисляют по следующей зависимости: h (а ,-1 t82ji) (1-tp«C-tp3«)cosefcos2j / /sin(2rf+2), t 1/2arctp(a4-a,)/ ,). 2 ИЛ. Q S (Л
0ue.f
10
iftus.2
| Способ контроля вибросмещений и устройство для его осуществления | 1978 |
|
SU746203A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения перемещений | 1982 |
|
SU1101673A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
