4 4
00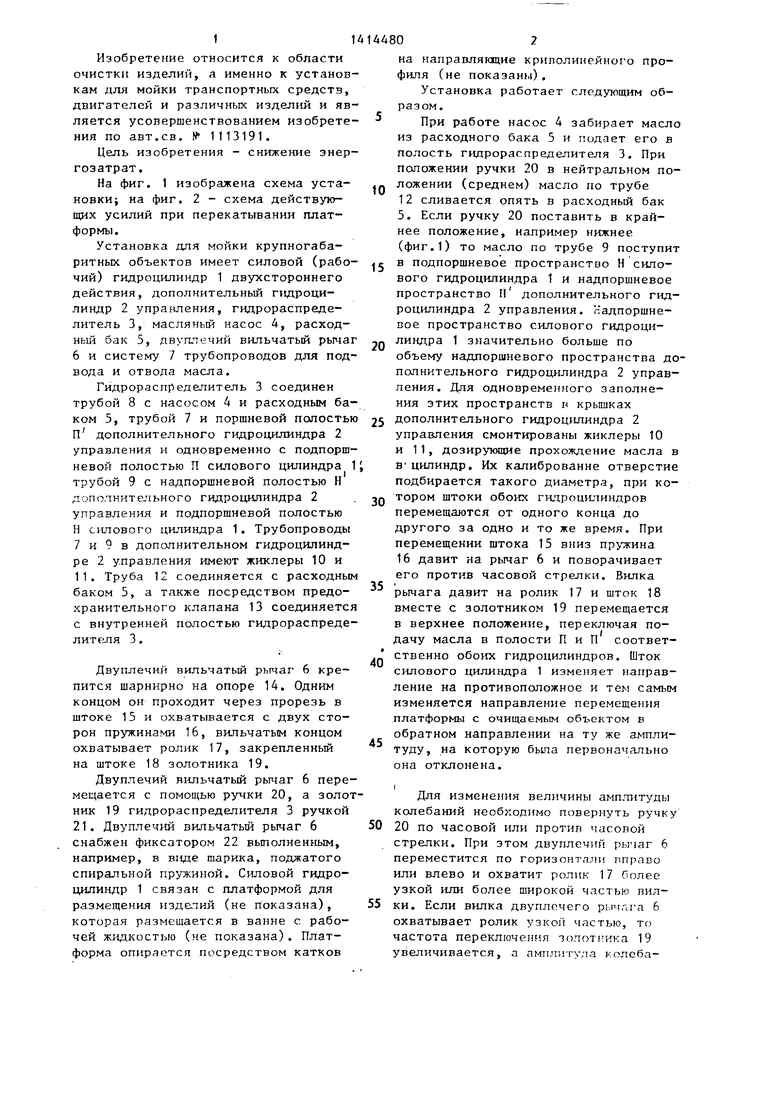
| название | год | авторы | номер документа |
|---|---|---|---|
| Бадья для укладки бетонной смеси | 1980 |
|
SU881270A1 |
| ГЛУБИННО-НАСОСНАЯ УСТАНОВКА | 1991 |
|
RU2054582C1 |
| Устройство для обработки дисков железнодорожных колес | 1988 |
|
SU1613231A1 |
| Гусеничный движитель транспортного средства | 1991 |
|
SU1799795A1 |
| Устройство для стряхивания плодов | 1987 |
|
SU1419578A1 |
| ГИДРАВЛИЧЕСКИЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2010 |
|
RU2436696C1 |
| САМОСВАЛЬНЫЙ ПРИЦЕП | 1993 |
|
RU2057658C1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1981 |
|
SU1009817A1 |
| Рабочее оборудование планировщика | 1986 |
|
SU1411391A1 |
| ПРУЖИННО-ГИДРАВЛИЧЕСКИЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2006 |
|
RU2337028C2 |
Изобретение позволяет снизить энергозатраты за счет использования электродвигателей привода гидронасоса меньшей мощности. Для обеспечения колебательного движения платформы с изделиями с различными величинами амплитуды колебаний и автоматического режима колебательных движений переключение подачи масла в полости силового рабочего цилиндра производится посредством гидрораспределителя, шток золотника которого кинематически связан со штоком дополнительного гидроцилиндра управления. Полости последнего в свою очередь соединены трубопроводами с полостями силового рабочего гидроцилиндра и с полостями гидрораспределителя. В результате обеспечивается автоматический режим возвратно-поступательного движения платформы по криволинейной направляющей с переменной величиной ампглтуды колебаний. 2 ил. с о (Л
N)
1
Изобретение относится к области очистки изделий, а именно к установкам для мойки транспортных средств, двигателей и различных изделий и является усопершенствованием изобретения по авт.св. № 1113191.
Цель изобретения - снижение энергозатрат.
На фиг. 1 изображена схема установки; на фиг. 2 - схема действую- цих усилий при перекатывании платформы.
Установка для мойки крупногабаритных объектов имеет силовой (рабочий) гидроцилиндр 1 двухстороннего действия, дополнительный гидроцилиндр 2 упрагшения, гидрораспределитель 3, масляный насос 4, расходный бак 5, двуплечий вильчатый рыча
6и систему 7 трубопроводов для подвода и отвода масла.
Гидрораспределитель 3 соединен трубой 8 с насосом А и расходным баком 5, трубой 7 и поршневой полость П дополнительного гидроцилиндра 2 управления и одновременно с подпорш невой полостью П силового цилиндра трубой 9 с надпоршневой полостью Н дополнительного гидроцилиндра 2 управления и подпоршневой полостью Н ctmoBoro цилиндра 1. Трубопроводы
7и 9 в дополнительном гидроцилиндре 2 управления имеют жиклеры 10 и 11. Труба 12 соединяется с расходны баком 5, а также посредством предохранительного клапана 13 соединяетс с внутренней полостью гидрораспреде литешя 3.
Двуплечий вильчатый рычаг 6 крепится шарнирно на опоре 14. Одним концом он проходит через прорезь в штоке 15 и охватывается с двух сторон пружинами 16, вильчатым концом охватывает ролик 17, закрепленный на штоке 18 золотника 19.
Двуплечий вильчатый рычаг 6 перемещается с помощью ручки 20, а золоник 19 гидрораспределителя 3 ручкой 21. Двуплечий вильчатый рычаг 6 снабжен фиксатором 22 выполненным, например, в виде шарика, поджатого спиральной пружиной. Силовой гидроцилиндр 1 связан с платформой для размещения изделий (не показана), которая размещается в ванне с рабочей жидкостью (не показана). Платформа опирается посредством катков
0
480
2
на направлякщие криполинейног-о профиля (не показаны).
Установка работает следующим образом.
При работе насос 4 забирает масло из расходного бака 5 и подает его в полость гидрораспределителя 3. При положении ручки 20 в нейтральном поQ ложении (среднем) масло по трубе 12 сливается опять в расходный бак 5. Если ручку 20 поставить в крайнее положение, например нижнее (фиг.1) то масло по трубе 9 поступит
5 в подпоршневое пространство Н силового гидроцнпиндра 1 и надпоршневое пространство tl дополнительного гидроцилиндра 2 управления. Надпоршневое пространство силового гидроцилиндра 1 значительно больше по объему надпоршневого пространства дополнительного гидроцилиндра 2 управления. Для одновременного заполнения этих пространств и крышках
5 дополнительного гидроцилиндра 2 управления смонтированы жиклеры 10 и 11, дозирующие прохождение масла в В цилиндр. Их калиброванне отверстие подбирается такого диаметра, при коQ тором штоки обоих гидроцилиндров перемещаются от одного конца до другого за одно и то же время. При перемещении штока 15 вниз пр жина 16 давит на рычаг 6 и поворачивает его против часовой стрелки. Вилка
5
0
рычага давит на ролик 17 и шток 18 вместе с золотником 19 перемещается в верхнее положение, переключая подачу масла в полости П и П соответ- ственно обоих гидроцилиндров. Шток
5
силового цилиндра 1 изменяет направление на противоположное и тем самым изменяется направление перемещения платформы с очищаемым объектом в обратном направлении на ту же амплитуду, на которую была первоначально она отклонена.
Для изменения величины амплитуды колебаний необходимо повернуть ручку
20 по часовой или против часовой стрелки. При этом двуплечий рычаг 6 переместится по горизонтали вправо или влево и охватит ролик 17 Солее узкой или более широкой частью пилки. Если вилка двуплечего рычлга 6 охватывает ролик узкой частью, то частота переключення золотника 19 увеличивается, а амплитуда колсба3U
НИИ штоков обоих цилиндров 1 и 2 уменьшается.
Первоначальный гп, ск платформы осуществляется установкой ручки 20 для обеспечения амплитуды колебаний, а затем с помощью гидроципиндра 2 управления .колебания платформы переходят на автоматический режим. Постепенно амплитуда колебания платформы увеличивается (переключением ручки 20) и, достигнув оптимальной рабочей амплитуды, платформа продолжает совершать колебательные движения в автоматическом режиме, осуществляемом гидроцилиндром 2 управления.
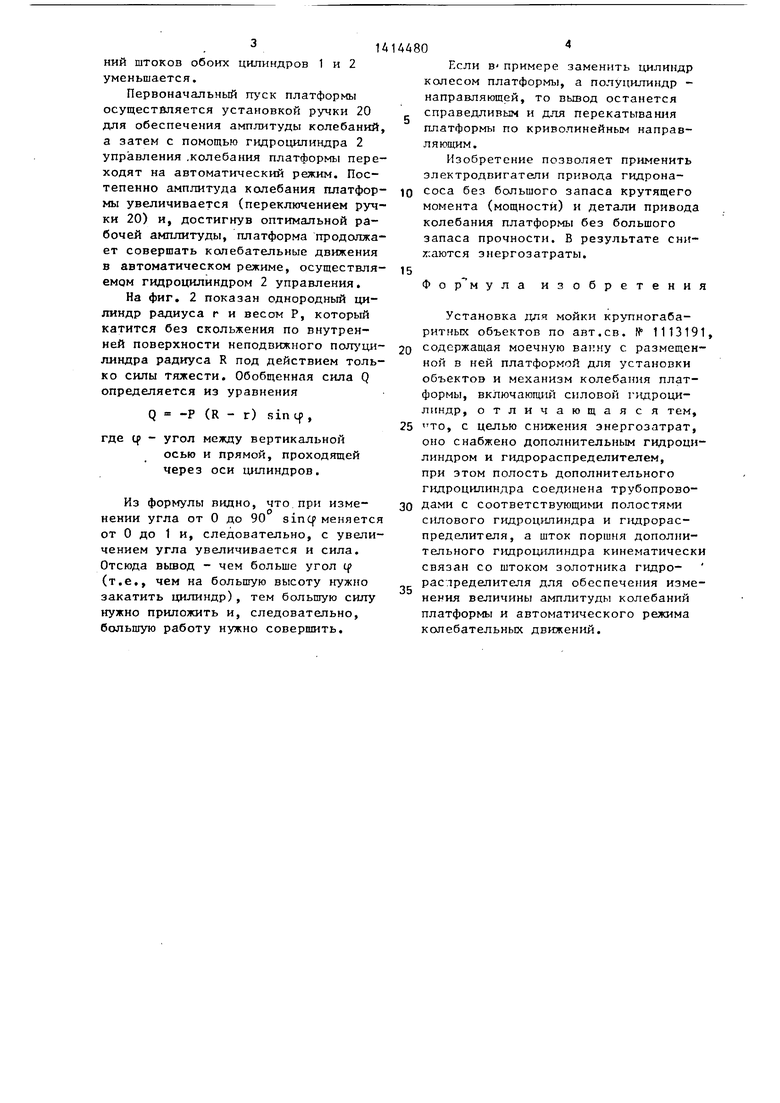
На фиг, 2 показан однородный ци линдр радиуса г и весом Р, который катится без скольжения по внутренней поверхности неподвижного линдра радиуса R под действием только силы тяжести. Обобщенная сила Q определяется из уравнения
Q -Р (R - г) sin Ц) ,
где cf - угол между вертикальной
осью и прямой, проходящей через оси цилиндров.
Из формулы видно, что при изменении угла от О до 90 sincp меняется от О до 1 и, следовательно, с увеличением угла увеличивается и сила. Отсюда вьшод - чем больше угол cf (т.е., чем на большую высоту нужно закатить цилиндр), тем большую силу нужно приложить и, следовательно, большую работу нужно совершить.
480
Если В примере заменить цилиндр колесом платформы, а полуцилиндр - направляющей, то вывод останется справедливым и для перекатывания платформы по криволинейным направляющим.
Изобретение позволяет применить электродвигатели привода гидрона- 10 coca без большого запаса крутящего момента (мощности) и детали привода колебания платформы без большого запаса прочности. В результата снижаются энергозатраты.
15
Фор мула изобретения
Установка ZUIH мойки крупногабаритных объектов по авт.св. № 1113191,
2Q содержащая моечную ванну с размещенной в ней платформой для установки объектов и механизм колебания платформы, включающий силовой г одpoци- линдр, отличающаяся тем,
25 ТО, с целью снижения энергозатрат, оно снабжено дополнительным гидроцилиндром и гидрораспределителем, при этом полость дополнительного гидроцилиндра соединена трубопрово30 дами с соответствующими полостями силового гидроцилиндра и гидрораспределителя, а шток поршня дополнительного гидроцилиндра кинематически связан со штоком золотника гидро- раслределителя для обеспечения изменения величины амплитуды колебаний платформы и автоматического режима колебательных движений.
Bftimnu Наказ 3812/8Тираж 565
Ироизн.-пояигр. пр-тие, г. Ужгород, ул. Проектная, 4
(риг.2
Подписное
| Устройство для мойки крупногабаритных объектов | 1983 |
|
SU1113191A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
