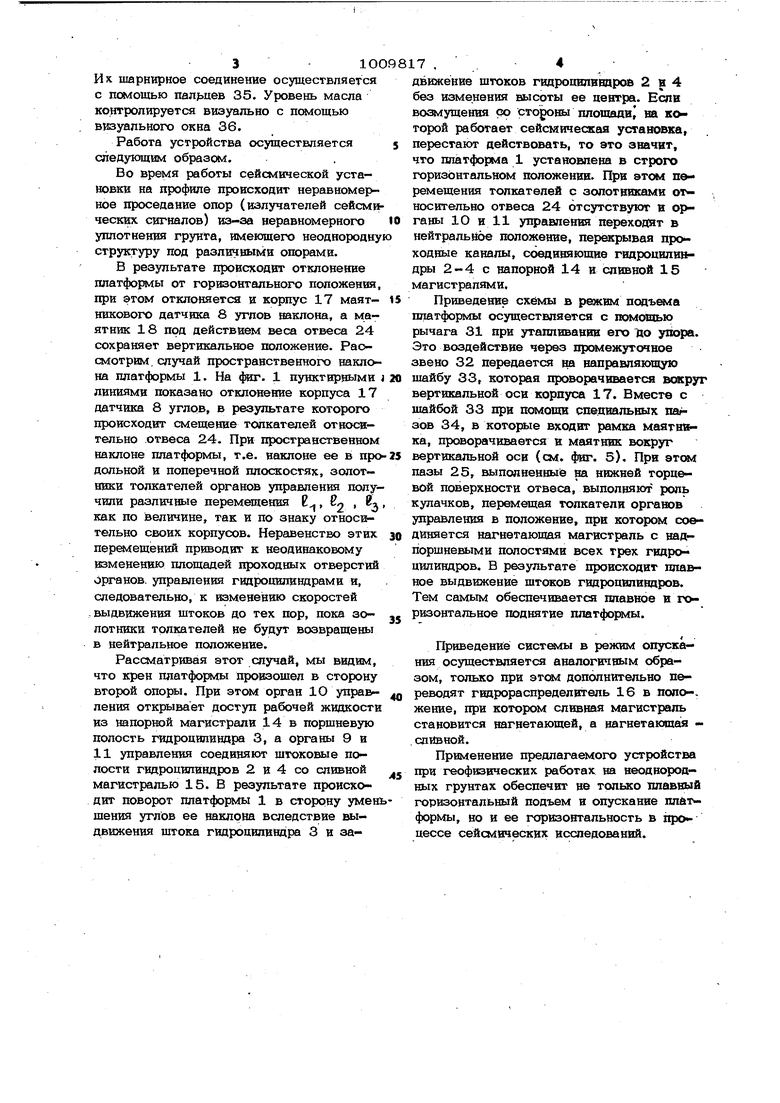
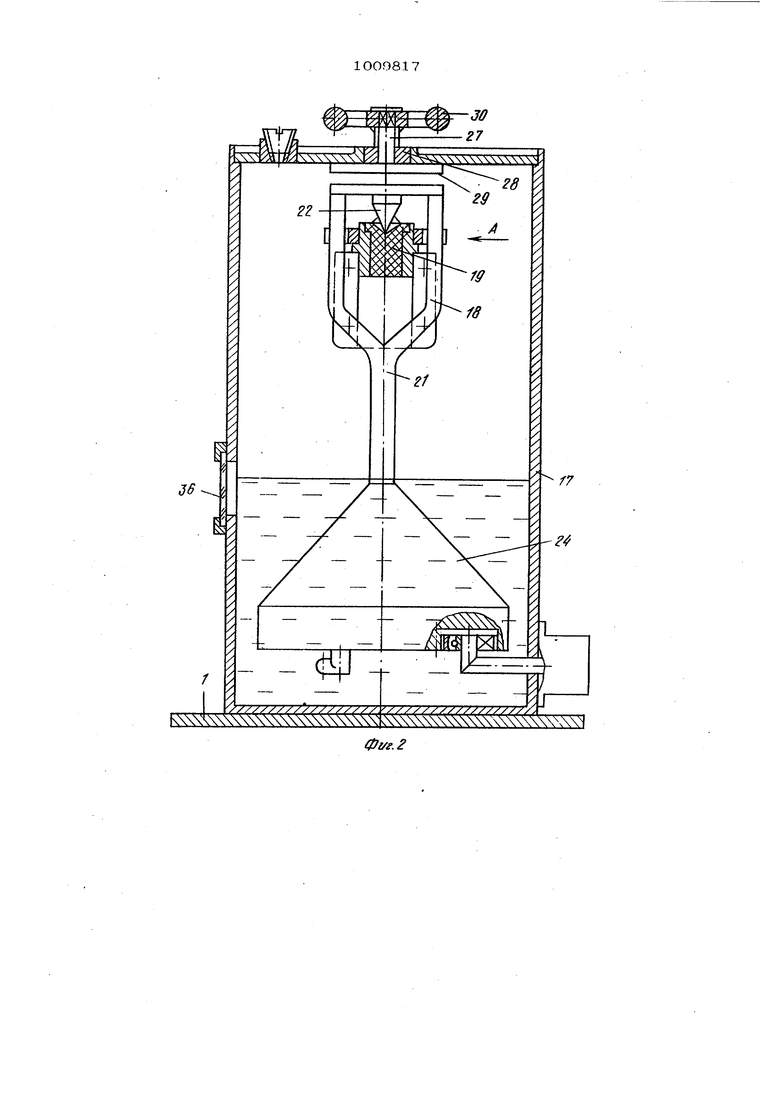
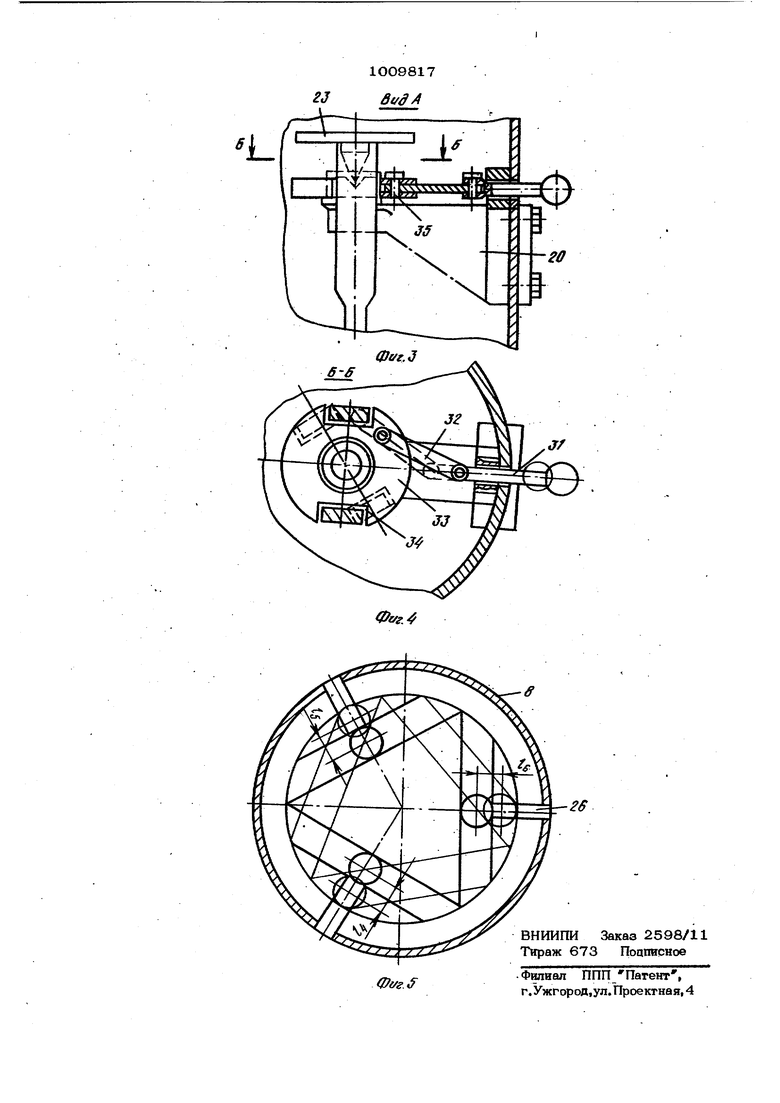
Изобретение относится к устройствам для стабилизации горизонтального положения платформы транспортного средства относительно излучателей сейсмических колебант-1й, установленнык на платформе. Известно устройство для стабилизации горизонтального положения платформы транспортного средства, содержащее ма ятниковый датчик углов наклона с отвесом, взаимодействующим с толкателями органов управления исполнительными гидроцилиндрами выносных опор, сообщенными с силовой гидромагистралью ij Недостатком такого устройства является его малая эффективность при работе Так как отвес может взаимодействовать не более чем с двумя толкателями, а так как платформа устанавливается не менее чем на трех опорах, то отвес на толкатель органа управления силовым гидроцилиндром третьей опоры не воздействует. Целью изобретения является повышение эффективности.работы устройства для стабилизации положения платформы транс портного средства за счет воздействия отвеса одновременно на все толкателр, что важно при установке транспортного средства на невзрывных источниках сей- см1гческих колебаний когда устройство для стабилизации должно реагировать га быстроизменяющиеся возмущения со стороны грунта. Поставленная цель достигается тем, что в устройстве для стабилизации гори эонтального положения платформы транспортнохч) средства, содержащем маятниковый датчик углов наютона с отвесом, взаимодействующим с толкателями органов управления исполнительными гидродипиндрами выносных опор, сообщенными с силовой гидромагистралью, на нйкнёй торцевой поверхности отвеса маятникового датчика выполнены пазы, в которых подвижно уста 1овлены концы толкателей органов управления исполнитель ными гидроцилиндрами выносных опор,при этом продольная ось каждого паза перпендикулярна плоскости,проходящей через вер тикаль.проведенную из точки опоры отвеса маятникового датчика и вертикальную ось исполнительного гидроцилиндра выносной ОПОрЬ, На фиг. 1 изображена принципиальная схема предлагаемого устройства с трехточечной системой выносных опор; vm фиг. 2 - попзречный разрез маятникового датчика; на фиг. 3 - вид Л на фиг. 2; iia фиг. 4 разрез Б-Б на фиг.З на фиг. 5 - схема перевода толкателей органов управления гидроцилиндрами вь:носных опор устройства в положение подъема (опускания) платформы. Устройство содержит платформу 1, на которой жестко закреплены корпуса трех гидроцилиндров 2-4, а их штоки соединены с невзрывными источниками 5-7 сейсмических сигналов, например электродинамическими излучателями, служащими выносными опорами, на которые платформа устанавливается в горизонтальном положении при работе установки. На платформе 1 таклсе закреплен маятниковый датчик 8 углов наклона с тремя органами 9-11 управления, которые в свою очередь гидромагистралями 12 и 13 соответственно соединяют с надпрршневой и штоковой полостью падроцилиндров 2-4, Рабочая жидкость к органам 9-11 управления подается под давлением по напорной магистрали 14, например, раздельноагрегатной системы трактора, а отводится по сливной магистрали 15 (насос. бак, клапаны на чертежах не показаны). При этом гидрораспределитель 16, кото-рый служит для взаимной перемен нагнетающей со сливной магистралью, зафшссирован в положении, при котором не меняется направление магистралей 14 и 15. В х ерметичном корпусе маятникового датчика 8 углов наклона, выполненном в виде цилиндра, корпус 17 которого заполнен жидкостью, подвешен маятник 18, опорой для которого служит пята 19, закрепленная на консольном кронштейне 20. Маятник-18 содержит стержень 21, на одном из концов которого.закреплена рамка с конусом 22 и диском 23, на другом конце закреплен отвес 24, имеющий конусно-цилиндрическую форму. На нижней торцевой поверхности отвеса выполнень пазы 25. В пазы 25 подвижно установлены кониы толкателей 26 органов 9-11 управления , которые в свою очередь неподвижно закреплены с наружной части корпуса 17 датчика углов. Для предотвращения колебания маятника 18 при транспортных переездах на корпусе 17 над диском 23 маятника установлен на винтовой паре 27-28 другой диск 29. Фиксация маятника 18 относительно корпуса 17 производится за счет введения в соприкосновение дисков 23 и 29 с помощью маховичка 30. Механизм переключения системы в режим подъема плат4юрмы состоит из pt.iчага 31, промежуточного звена 32 и направляющей шайбы 33 с пазами 31.
Их шарнирное соединение осуществляется с немощью 35. Уровень масла контролируется визуально с помощью визуального окна 36.
Работа устройства осуществляется
следующим образом.
Во время работы сейсмической установки на профиле происходит неравномерное проседание опор (излучателей сейсмических сигналов) из-за неравномерного уплотнения грунта, имеющего неоднородную структуру под различными опорами.
В результате происходит отклонение платформы от горизонтального положения, при этом отклоняется и корпус 17 маятникового датчика 8 углов наклона, а маятник 18 под действием веса отвеса 24 сохраняет вертикальное положение. Рассмотрим, случай пространственного наклона платформы 1. На фиг. 1 пунктирными i линиями показано отклонение корпуса 17 датчика 8 углов, в результате которого происходит смещение толкателей относительно отвеса 24. При гфостранственном наклоне платформы, т.е. наклоне ее в про дольной и поперечной плоскостях, золотники толкателей органов управления получили различные перемещения К-., о Э как по величиие, так и по знаку относвн тельно своих корпусов. Неравенство этих перемещений приводит к неодинаковому изменению площадей проходных отверстий чэрганов. управления гидрошшиндрами и, следовательно, к изменению скоростей .выдвижения щтоков до тех пор, пока золотники толкателей не будут возвращены в нейтральное положение.
Рассматривая этот случай, мы видим, что крен платформы произошел в сторону второй опоры. При этом орган 1О управления открывает доступ рабочей жидкости из напорной магистрали 14 в поршневую полость пздроцилиндра 3, а органы 9 и 11 управления соединяют щтоковые полости гвдроцкпиндров 2 и 4 со сливной магистралью 15. В результате происходит поворот платформы 1 в сторону уменьщения углов ее наклона вследствие выдвижения штока гидроцилиндра 3 и задвижёние щтоков гидроцилиндров 2 и 4 без изменения высоты ее центра. Если воаулущення оо стороды площади на которой работает сейсмическая уставовка, перестают действовать, то это значит, что платформа 1 установлена в строго горизонтальном положении. При этом пе ремещения толкателей с золотвиками относительно отвеса 24 отсутствуют и органы 1О и 11 управления переходят в нейтральное положение, перекрывая про ходвые каналы, соединяющие гидроиилицдры 2-4 с напорной 14 и сливной 15 магистралями.
Приведение схемы в режим подъема платформы осуществляется с помоЕоью рычага 31 при утапливании его Но уяора. Это воздействие через промежуточное звено 32 передается на направляющую шайбу 33, которая проворачивается вокру вертикальной оси корпуса 17. Вместе с шайбой 33 при помощи специальных патзов 34, в которые входит рамка маятника, проворачивается и маятник вокруг вертикальной оси (см. фиг. 5). При этсм пазы 25, выполненные на нижней торцевой поверхности отвеса, выполняют роль кулачков, перемещая толкатели органов управления в положение, при котором со&диняется нагнетающая магистраль с надпоршневыми полостями всех трех гидроцилиндров. В результате происходит плавное выдвижение щтоков гидроцилиндров. Тем самым обеспечивается плавное и горизонтальное поднятие платформы.
Приведение систгалы в режим опускания осуществляется аналогичным образом, только при этсм дополнительно переводят гидрораспределитель 16 в поло-, жение, при котором сливная магистраль становится нагнетающей, а нагнетающая сливной.
Применение предлагаемого устройства при геофизических работах на неоднородных грунтах обеспечит не только плавили горизонтальный подъем и опускание платформы, но и ее горизонтальность в процессе сейсмических исследований.
к xvcvл vv
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1982 |
|
SU1066844A1 |
| Устройство для стабилизации заданного положения платформы транспортного средства | 1990 |
|
SU1743916A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1984 |
|
SU1339038A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1985 |
|
SU1379136A2 |
| Источник сейсмических колебаний | 1989 |
|
SU1714548A1 |
| Гидромеханическая система стабилизации положения рабочего органа планировочной машины | 1983 |
|
SU1164375A1 |
| Саморазгружающаяся тракторная тележка со стабилизацией положения остова | 1984 |
|
SU1235759A1 |
| Источник сейсмических колебаний | 1986 |
|
SU1509768A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙПРОДОЛЬНО-ПОПЕРЕЧНОЙ СТАБИЛИЗАЦИИПОЛОЖЕНИЯ РАБОЧИХ ОРГАНОВ12 | 1971 |
|
SU426614A1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2249521C1 |
УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ГОРИЗОНТАЛЬНОГО ПОЛОЖЕНИЯ ПЛАТФОРМЫ ТРАНСПОРТНОГО СРЕДСТВА, содержащее маятниковый датчик угвов наклона с отвесов, взаимодействующим с толка телам в органов упдарг - А Si- 4Ч .t,.lr4/. ,щ яй. ti {414 « Y j :. ц ., .% Ч Ssiib;UK V-i i.A равления исполнительными гиароаилнш рами выносных опор, сообщенными с С9 повой гидромагистралью, о т л в ч а - ю щ е е с я тем, что, с целью 1ювыше ния эффективности работы устройства за счет воздействия отвеса одновремешю на все толкатели, иа нижней торсовой поверхности отвеса маятникового датчика выполнены пазы, в которых подвижво установлены коиоы толкателей, при этом продольная ось каждого паза nei пендшсулярЕш плоскости, проходящей через вертикаль, проведенную из точки опоры отвеса маятникового (датчики и вертикальную ось исполнителыюго гвдроч цилиндра выносной опоры. СО 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3933359, | |||
| СПОСОБ ПОЛУЧЕНИЯ ЧИСТОГО ГЛИНОЗЕМА И ЕГО СОЛЕЙ ИЗ СИЛИКАТОВ ГЛИНОЗЕМА, ПРОСТЫХ ГЛИН И. Т.П. | 1915 |
|
SU280A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
