П. -- -:
on о ю
i-jg аУЙ
1- V
тельно. Для установки М 11 с рабочим органом 12 (бурильной машиной) на забой для бурения шпуров гидроцилиндром 21 раздвигают М I I и воздействуют на стрелу 18 и Р 19 с тягой 20. Верхние концы Р 19 перемещаются горизонтально и воздействуют
на стрелу 18, и М 11 опускается. Параметры М 11 и 14, связанные между собой зависимостью, приведенной в формуле изобретения, обеспечивают перемещение рабочих органов 12 и 15 в горизонтальной плоскости с отклонением по вертикали ±5%. 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2449127C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2426884C1 |
| Стволовая буропогрузочная машина | 1982 |
|
SU1078078A1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2011 |
|
RU2460884C1 |
| Проходческий комплекс для сооружения вертикальных стволов шахт | 1985 |
|
SU1259015A1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2011 |
|
RU2455489C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2007 |
|
RU2370651C2 |
| БУРИЛЬНЫЙ МОДУЛЬ СТВОЛОВОЙ БУРИЛЬНОЙ УСТАНОВКИ | 2011 |
|
RU2455485C1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1991 |
|
RU2042831C1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
Изобретение относится к шахтному строительству, а именно к оборудованию для проходки вертикальных стволов шахт буровзрывным способом сверху вниз. Цель - повышение надежности и уменьшение энергоемкости за счет обеспечения перемешения рабочих органов в горизонтальной плоскости. Буропогрузочная машина включает поворотный корпус 5, распорное устройство 2 и установленные на корпусе 5 манипуляторы (М) И и 14 с рабочими органами 12 и 15 соответственно, подвешенными на одних концах рукоятей (Р) 19. Каждый М (11, 14) имеет стрелу 18, тягу 20 и гидроцилиндр 21 привода.С корпусом 5 шар- нирно соединены одни концы стрелы 18 и тяги 20 каждого М 14 и 11. Другой конец тяги 20 ц арнирно соединен со свободным концом Р 19, а свободный конец стрелы 18 - со средней частью Р 19. Параметры каждого М 11 и 14 связаны между собой зависимостью, приведенной в формуле изобретения. Для перемешения рабочего органа 15 (грейфера) включается гидроцилиндр 21. В результате поворота стрелы 18 и тяги 20, а также сложного движения Р 19 точка подвески грейфера 15 перемещается поступаю (Л
Изобретение относится к шахтному строительству, а именно к оборудованию для проходки вертикальных стволов шахт буровзрывным способом сверху вниз.
Цель изобретения - повышение надежности и уменьшение энергоемкости за счет обеспечения перемещения рабочих органов в горизонтальной плоскости.
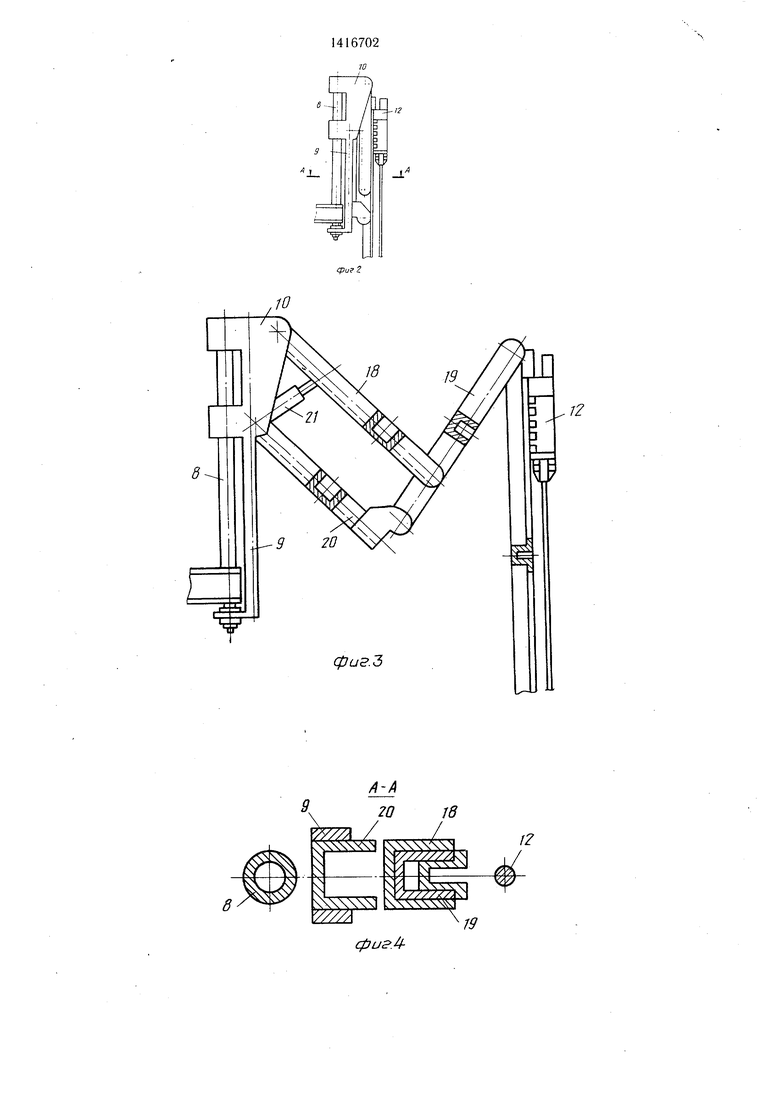
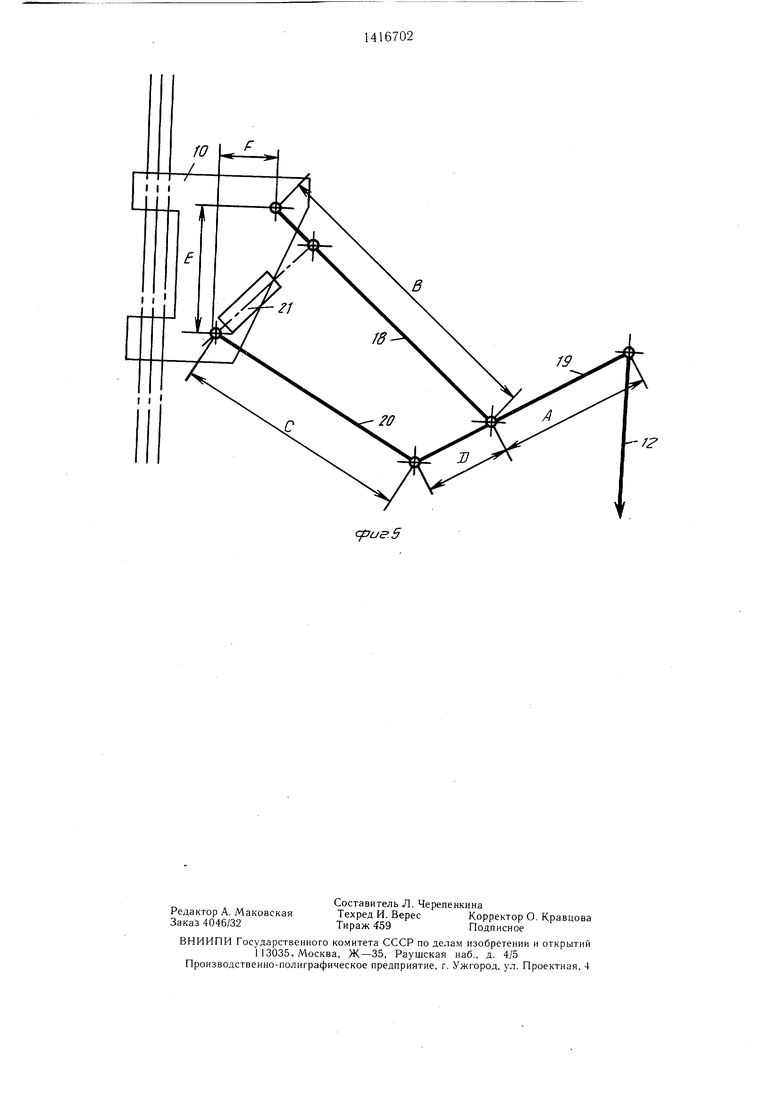
На фиг. 1 изображена буропогрузочная машина для проходки вертикальных стволов шахт, обший вид; на фиг. 2 - манипулятор буропогрузочной машины в сложенном виде; на фиг. 3 - то же, в рабочем положении; на фиг. 4 - сечение А-А на фиг. 2; на фиг. 5 - кинематическая схема манипулятора.
Буропогрузочная машина для проходки вертикальных стволов шахт содержит центрально расположенную в стволе колонну 1 с многолучевым распорным устройством 2, опалубку 3 с вертикальными направляющими 4, поворотный в горизонтальной плоскости корпус 5. Корпус 5 состоит из верхней 6 и нижней 7 плит, соединенных между собой расположенными по окружности стойками 8, выполненными в виде гидроцилиндров, штоки которых посредством тяг 9 связаны с кронщтейнами 10. На корпусе 5 установлены манипуляторы 11 с рабочими органами - бурильными машинами 12. Под плитой 7 жестко закреплен кронштейн 13 корпуса 5, аналогичный кронштейну 10. К кронштейну 13, расположенному в средней части плиты 7, прикреплен манипулятор 14 с рабочим органом, выполненным в виде грейфера 15. Грейфер 15 содержит привод 16 для его перемещения по вертикали и привод iV для управления челюстями.
Каждый из манипуляторов 11 или 14 содержит стрелу 18, прикрепленную шарнирно к корпусу посредством кронштейнов 10 или 13 и другим концом соединенную шарнирно с рукоятью 19. К верхнему концу рукояти 19 подвешен рабочий орган - бурильная машина 12 или грейфер 15. Нижний конец рукояти 19 связан шарнирно с тягой 20, соединенной шарнирно другим концом с корпусом посредством кронштейнов 10 или 13. Линия, соединяющая
оси шарниров тяги 20 и стрелы 18 на кронштейнах, расположена наклонно к вертикали. Стрелка 18 и рукоять 19 выполнены в виде коробчатых в сечении профилей разных размеров. При сложенном положении манипулятора 11 или 14 профиль рукояти 19 входит Б профиль стрелы 18, при этом профиль стрелы 18 плотно прилегает к тяге 20 за счет наклонного положения линии шар0 ниров тяги 20 и стрелы 18 на кронштейне 10 или 13.
Каждый манипулятор имеет гидроцилиндр привода 21, концы которого щарнир- но соединены с кронщтейном и со стрелой 18.
5 Для управления рабочими органами буропогрузочная машина имеет кабину 22 мащинис- та, расположенную в пространстве, ограниченном стойками 8. Для транспортировки по стволу буропогрузочная машина содержит серьгу 23 для каната.
0
Для обеспечения перемещения верхних концов рукоятей 19, а значит, и рабочих органов 12 и 15 по траектории, близкой к горизонтальной, размеры звеньев манипуля- торов (тяги, стрелы и рукояти) связаны между собой зависимостью
, , , , ,
0
5
0
где А - расстояние от щарнира, соединяющего рукоять со стрелой, до точки подвески рабочего органа;
В - длина стрелы;
С - длина тяги;
D - расстояние между щарнирами, один из которых соединяет рукоять с тягой, а другой - рукоять со стрелой;
Е - расстояние между проекциями на вертикальную плоскость шарниров, соединяющих тягу и стрелу с корпусом;
F - расстояние между проекциями на горизонтальную плоскость щарни- ров, соединяющих тягу и стрелу с корпусом.
Буропогрузочная мащина для проходки вертикальных стволов щахт работает следующим образом.
После проведения буровзрывных работ и проветривания буропогрузочную машину опускают на серьге 23 в забой и раскрепляют в стволе при помощи распорного устройства 2 в направляющих 4 опалубки 3. После этого приступают к погрузке разрушенной горной массы. Для перемещения грейфера 15 от центра к стенке ствола и обратно включают гидроцилиндр 21 привода и в результате поворота стрелы 18 и тяги 20 на кронштейне 13, а также сложного движения рукояти 19 точка подвески грейфера перемещается по траектории, близкой к горизонтали, т. е. поступательно. Вождение грейфера 15 по окружности осуществляют путем поворота плиты 7 вместе со стойками 8 в горизонтальной плоскости относительно колонны 1. Вертикальное перемещение грейфера 15 на одну заходку производят приводом 16, выполненным в виде пневмоцилиндра, а зачерпывание - приводом 17 челюстей.
После уборки породы, спуска опалубки, бетонирования крепи и очередного раскрепления буропогрузочной машины в направляющих 4 опалубки 3 приступают к бурению шпуров.
Для этого звенья манипуляторов 11 с бурильными машинами 12 раздвигают в радиальных направлениях. Раздвижку манипуляторов 11 производят включением в работу гидроцилиндров 21. Гидроцилиндр 21 воздействует штоком на стрелу 18, через нее - на рукоять 19 с тягой 20. Верхние концы рукоятей 19 перемещаются по горизонтальной траектории при небольшом усилии, действующем на стрелу 18 со стороны гидроцилиндров 21. При помощи стоек 8, выполняющих функции гидроцилиндров, и тяг 9 опускают кронштейны 10 вместе с манипуляторами 11, устанавливают бурильные машины 12 на забой для бурения шпуров. После бурения всех шпуров звенья манипуляторов 11 складывают, при этом профиль верхней части рукояти 19 точно входит в профиль стрелы 18. Манипуляторы 1 пово.- рачивают вокруг стоек 8 на угол до 90°, и вся буропогрузочная машина после освобождения и складывания распорного устройства 2 готова к транспортированию вверх по стволу для производства взрывных работ.
0
5
0
При соотношении между звеньями мани пуляторов .,,,43D 1 . 9F обеспечивается перемещение р;|б(Г Ч1 органов - грейфера и бурильны.х манит в горизонтальной плоскости с отклопеши-м ±5% (по вертикали). Возникающие n|iit работе рабочих органов вертика. и горизонтальные нагрузки распределяются по всем звеньям манипуляторов и почти не передаются на привод, в результате чего обеспечивается устойчивое положение звеньев манипуляторов при работе буропогрузочной машины.
Формула изобретения
Буропогрузочная машина для про.ходки вертикальных стволов шахт, включающая поворотный корпус, распорное устройство, установленные на корпусе манипуляторы с рабочими органами, подвешенными на одних концах рукоятей со стрелами, тягами и гидроцилиндрами привода, ог.1ичаюи{аяся тем, что, с целью повышения надежности и уменьшения энергоемкости за счет обеспечения переменгения рабочих органов в rojin- зонтальной плоскости, одни концы стрелы и тяги каждого манипулятора шарнирно соединены с корпусом, а другой конец тяги шарнирно соединен со свободным концом рукояти, а свободный конец стрелы - со средней частью рукояти, при этом параметры каждого манипулятора связаны между собой зависимостью
,,,43D 1,,
5
0
где А- расстояние от шарннра, соединяющего рукоять со стрелой, до точки подвеса рабочего органа:
В - длина стрелы;
С - длина тяги;
D - расстояние между шарнирами, один из которых соединяет рукоять с тягой, а другой - рукоять со стрелой;
Е - расстояние между проекциями на вертикальную плоскость нарниров, соединяющих тягу и стрелу с корпусом;
F - расстояние между проекциями на горизонтальную плоскость niapnii- ров, соединяющих тягу и CTpe.iy с корпусом.
XXVsXXXN
A-A 20
18
N
/
ХХЧХУЧУ
л
19
фиг.
ера а. 5
| Грейферный погрузчик | 1981 |
|
SU962620A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для проходки вертикальных стволов | 1980 |
|
SU960440A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
