Изобретение относится к горно-добывающей промышленности и может быть использовано при перемонтаже механизированных крепей у непроходимых геологических нарушений.
Целью изобретения является уменьшение затрат на транспортировку механизированной крепи, снижение срока демонтажно- монтажных работ, уменьшение потерь полезного ископаемого и повышение безопасности работ.
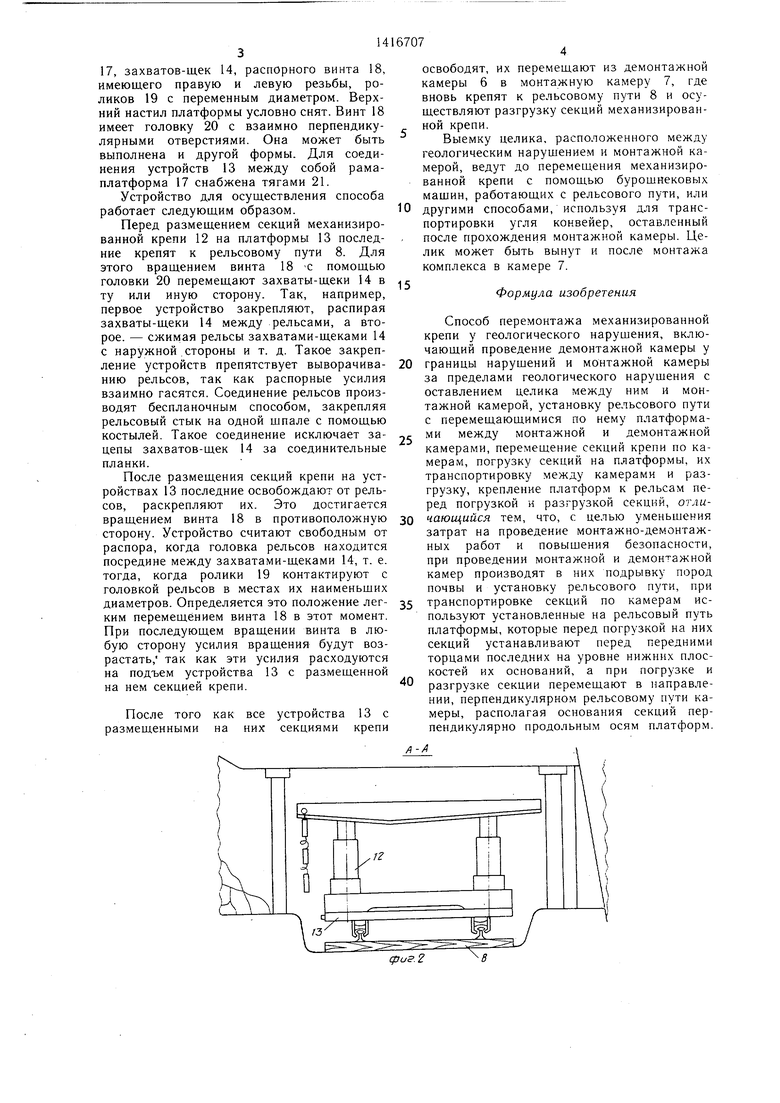
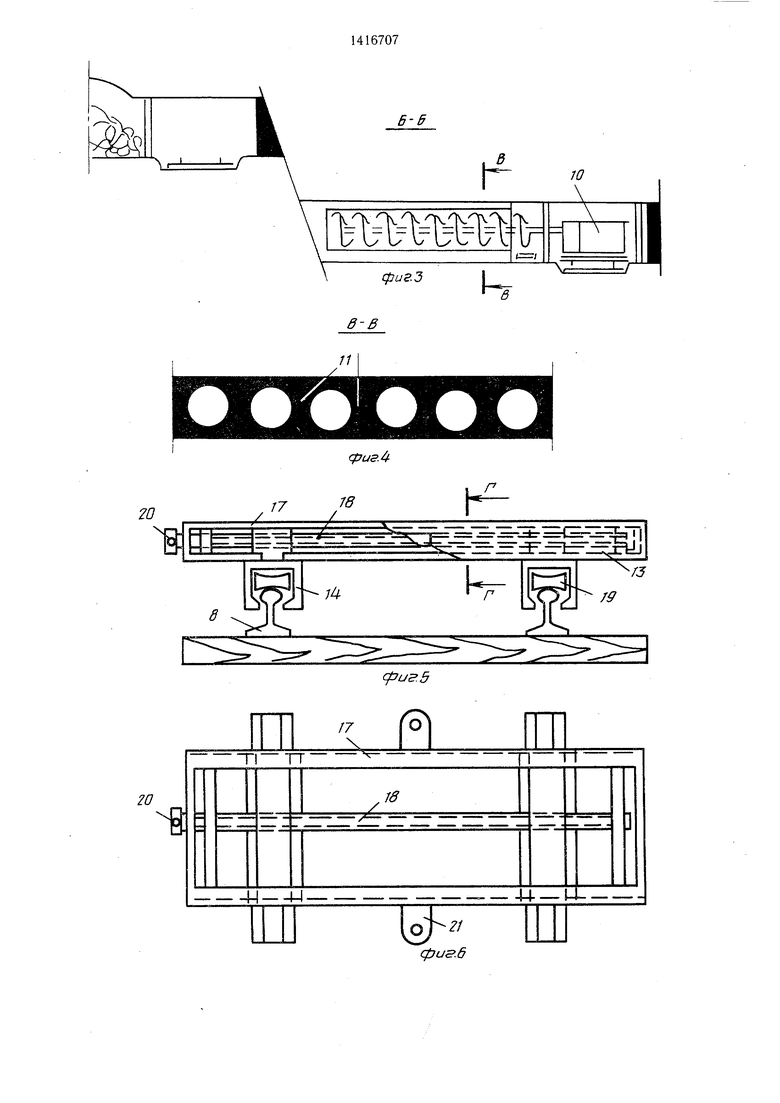
На фиг. 1 показана часть шахтного поля с непроходимым геологическим нарушением, вид в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - раз- рез В-В на фиг. 3; на фиг. 5 - устройство для осуш,ествления предлагаемого способа, обший вид; фиг. 6 - то же, вид в плане; на фиг. 7 - разрез Г-Г на фиг. 5.
На чертежах обозначены очистной за- бой 1, механизированный комплекс 2, конвейерный штрек 3, вентиляционный штрек 4, непроходимое геологическое нарушение 5, демонтажная камера б, пройденная у границ нарушения, монтажная камера 7, прой- денная за пределами геологического нарушения; рельсовый путь 8, целик 9 угля между геологическим нарушением и монтажной камерой, бурошнековая машина 10, меж- скважинные целики 11 угля, механизированная крепь 12, устройство 13 для осу- шествления способа, захваты-щеки 14 устройства, лебедка 15 для перемещения устройств, блок 16, рама-платформа 17, винт 18 с правой и левой резьбами, ролик 19 с переменным диаметром, головка 20 винта, тяга 21..
Перемонтаж механизированной крепи у геологического нарушения осуществляют следующим образом.
Очистной забой 1, оснащенный механизированным комплексом 2, отрабатывает выемочный столб, оконтуренный предварительно пройденными подготовительными выработками - конвейерным 3 и вентиляционным 4 штреками. На некотором расстоянии от границ столба имеется непро- ходимое для механизированного комплекса геологическое нарушение 5. При подходе комплекса к геологическому нарушению 5 вдоль него заранее проводят демонтажную камеру 6, а за пределами геологического нарушения до подхода к нему механизи- рованного комплекса - новую монтажную камеру 7, которую для обеспечения устойчивости располагают на расстоянии 5-6 м от границы нарушения, в зоне, которая имеет нормальные мощность и строение пласта. Одновременно с проведением камер 6 и 7 или после их проведения производят подрывку почвы в камерах на глубину, равную высоте рельсового пути с находящимися на нем платформами. В камерах 6 и 7, а также между ними на вентиляционном штреке 4 с перемещающимися по нему платформами устраивают рельсовый путь 8. Затем приступают к выемке целика 9 с помощью бурошнековых машин 10, работающих с рельсового пути 8. При этом поддержание выработанного пространства обеспечивается за счет межскважинных целиков 11 угля, которые впоследствии раздавливаются под давлением основной кровли при отходе комплекса 2 от монтажной камеры 7. Выбуривать целик 9 угля можно в любом направлении. Транспортировка угля производится на конвейер механизированного комплекса или на конвейер, оставленный для этих целей в новой монтажной камере 7 еще в период ее проведения.
После выемки целика 9 осуществляют перемонтаж механизированной крепи 12 комплекса 2 в следующем порядке: на рельсовом пути 8 в демонтажной камере 6 устанавливают платформы 13. Количество платформ 13 соответствует количеству секций крепи, а верхняя площадка платформы находится на уровне почвы пласта. Каждую из платформ 13 крепят к рельсовому пути 8 с помощью захватов-щек 14, попеременно распирая рельсовый путь 8 внутри рельсов или сжимая его снаружи, что исключает возможность выворачивания рельсов. Затем при вводе комплекса 2 в демонтажную камеру 6 каждую секцию механизированной крепи 12 размещают на платформах 13, которые соединяются между собой жесткими сцепками с изменяющейся длиной. После этого все платформы освобождают от скрепления с рельсовым путем 8 и всю механизированную крепь 12 перемещают лебедкой 15, установленной на вентиляционном штреке 4, сначала в вентиляционный штрек, а затем, используя блок 16, расположенный в конвейерном штреке 3, в монтажную камеру 7, где платформу крепят к рельсовому пути 8 аналогично креплению в демонтажной камере 6.
После схода секций крепи 12 с платформ 13 комплекс 2 продолжает работу по выемке угля в обычном порядке, а платформы 13 извлекают из монтажной камеры 7, а весь рельсовый путь 8 демонтируют.
Перемещение секций крепи в монтажную камеру 7 можно производить отдельными партиями или поодиночке.
Выемку целика 9 можно осуществлять и другими способами, например с помощью проходческого комбайна как до перемонтажа комплекса 2, так и после размещения механизированной крепи 12 в монтажной камере 7.
Устройство для перемещения крепи (платформа 13) состоит из рамы-платформы
17, захватов-щек 14, распорного винта 18, имеющего правую и левую резьбы, роликов 19 с переменным диаметром. Верхний настил платформы условно снят. Винт 18 имеет головку 20 с взаимно перпендикулярными отверстиями. Она может быть выполнена и другой формы. Для соединения устройств 13 между собой рама- платформа 17 снабжена тягами 21.
Устройство для осуществления способа работает следующим образом.
Перед размещением секций механизированной крепи 12 на платформы 13 последние крепят к рельсовому пути 8. Для этого вращением винта 18 С помощью головки 20 перемещают захваты-щеки 14 в с ту или иную сторону. Так, например, первое устройство закрепляют, распирая захваты-щеки 14 между рельсами, а второе. - сжимая рельсы захватами-щеками 14
освободят, их перемещают из демонтажной камеры б в монтажную камеру 7, где вновь крепят к рельсовому пути 8 и осуществляют разгрузку секций механизированной крепи.
Выемку целика, расположенного между геологическим нарущением и монтажной камерой, ведут до перемещения механизированной крепи с помощью бурошнековых мащин, работающих с рельсового пути, или 10 другими способами, используя для транспортировки угля конвейер, оставленный после прохождения монтажной камеры. Целик может быть вынут и после монтажа комплекса в камере 7.
Формула изобретения
Способ перемонтажа механизированной крепи у геологического нарушения, включающий проведение демонтажной камеры у
с наружной стороны и т. д. Такое закрепление устройств препятствует выворачива- 20 границы нарущений и монтажной камеры нию рельсов, так как распорные усилияза пределами геологического нарущения с
оставлением целика между ним и монтажной камерой, установку рельсового пути с перемещающимися по нему платформами между монтажной и демонтажной камерами, перемещение секций крепи по камерам, погрузку секций на платформы, их транспортировку между камерами и разгрузку, крепление платформ к рельсам пе25
ред погрузкой и разгрузкой секции, отливзаимно гасятся. Соединение рельсов производят беспланочным способом, закрепляя рельсовый стык на одной щпале с помощью костылей. Такое соединение исключает зацепы захватов-щек 14 за соединительные планки.
После размещения секций крепи на устройствах 13 последние освобождают от рельсов, раскрепляют их. Это достигается
вращением винта 18 в противоположную зо чающийся тем, что, с целью уменьшения сторону. Устройство считают свободным отзатрат на проведение монтажно-демонтажраспора, когда головка рельсов находитсяных работ и повышения безопасности,
посредине между захватами-щеками 14, т. е.при проведении монтажной и демонтажной
тогда, когда ролики 19 контактируют скамер производят в них подрывку пород
головкой рельсов в местах их наименьшихпочвы и установку рельсового пути, при
диаметров. Определяется это положение лег- 35 транспортировке секций по камерам ис- ким перемещением винта 18 в этот момент.пользуют установленные на рельсовый путь
платформы, которые перед погрузкой на них секций устанавливают перед передними торцами последних на уровне нижних плоскостей их оснований, а при погрузке и разгрузке секции перемещают в направлении, перпендикулярном рельсовому пути камеры, располагая основания секций перпендикулярно продольным осям платформ.
При последующем вращении винта в любую сторону усилия вращения будут возрастать, так как эти усилия расходуются на подъем устройства 13 с размещенной на нем секцией крепи.
После того как все устройства 13 с размещенными на них секциями крепи
40
с
освободят, их перемещают из демонтажной камеры б в монтажную камеру 7, где вновь крепят к рельсовому пути 8 и осуществляют разгрузку секций механизированной крепи.
Выемку целика, расположенного между геологическим нарущением и монтажной камерой, ведут до перемещения механизированной крепи с помощью бурошнековых мащин, работающих с рельсового пути, или 0 другими способами, используя для транспортировки угля конвейер, оставленный после прохождения монтажной камеры. Целик может быть вынут и после монтажа комплекса в камере 7.
Формула изобретения
Способ перемонтажа механизированной крепи у геологического нарушения, включающий проведение демонтажной камеры у
границы нарущений и монтажной камеры за пределами геологического нарущения с
25
ред погрузкой и разгрузкой секции, отли чающийся тем, что, с целью уменьшения затрат на проведение монтажно-демонтаж40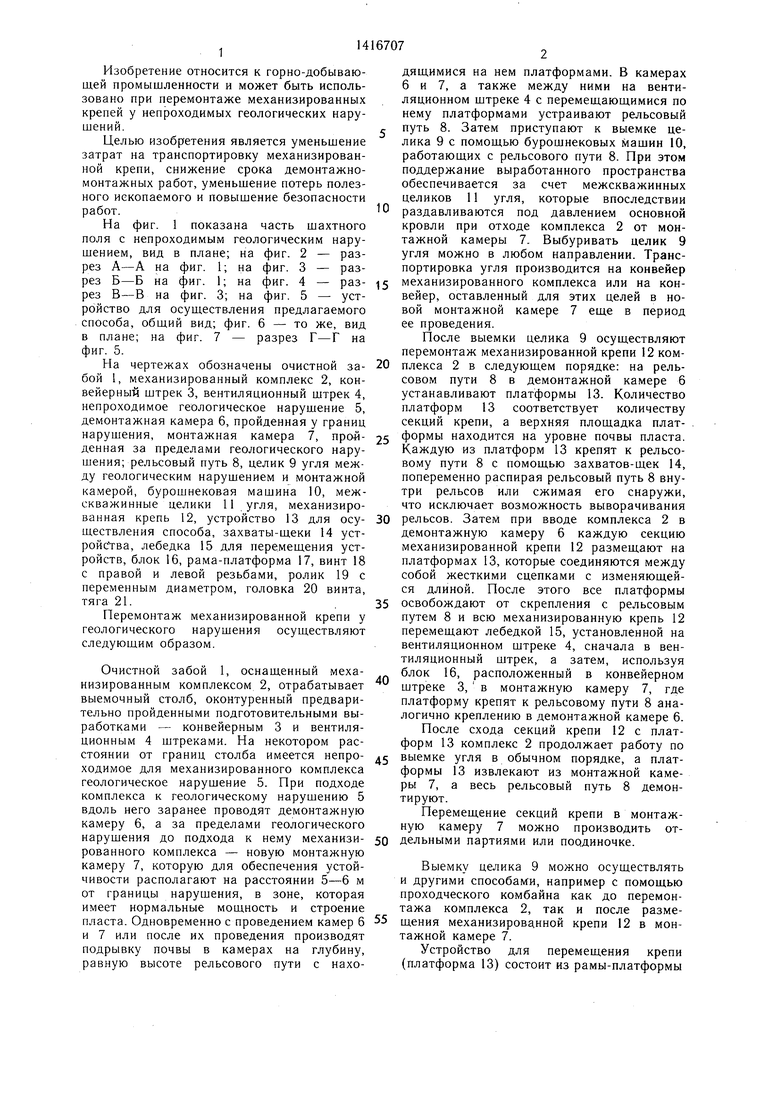
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ МЕХАНИЗИРОВАННОГО КОМПЛЕКСА | 1996 |
|
RU2121959C1 |
| Способ отработки механизированными комплексами шахтных полей с непереходимыми нарушениями | 1986 |
|
SU1328520A1 |
| СПОСОБ КОМБИНИРОВАННОЙ ОТКРЫТО-ПОДЗЕМНОЙ РАЗРАБОТКИ УГОЛЬНЫХ ПЛАСТОВ | 2013 |
|
RU2524709C2 |
| СПОСОБ ПЕРЕМОНТАЖА МЕХАНИЗИРОВАННОЙ КРЕПИ ПРИ РАЗРАБОТКЕ НАРУШЕННЫХ ПЛАСТОВ | 1991 |
|
RU2017963C1 |
| Станок для монтажа и демонтажа механизированных крепей | 1976 |
|
SU767353A1 |
| СПОСОБ ПОДГОТОВКИ И ОТРАБОТКИ ЗАПАСОВ ШАХТНЫХ ПОЛЕЙ | 2013 |
|
RU2513607C2 |
| Способ монтажа механизированной цепи очистного комплекса | 1990 |
|
SU1767192A1 |
| СПОСОБ МОНТАЖА МЕХАНИЗИРОВАННОГО КОМПЛЕКСА И ВЕДЕНИЕ ОЧИСТНЫХ РАБОТ | 2000 |
|
RU2184240C2 |
| Способ разработки мощных крутых угольных пластов горизонтальными слоями | 1988 |
|
SU1578338A1 |
| СПОСОБ РАЗРАБОТКИ МОЩНОГО ПОЛОГОГО УГОЛЬНОГО ПЛАСТА СТОЛБАМИ-КАМЕРАМИ | 2005 |
|
RU2295037C1 |
Изобретение относится к горно-добывающей промышленности и м. б. использовано при перемонтаже механизированных крепей (МК) у непроходимых геологических нарушений. Цель - уменьшение затрат на транспортировку МК, снижение срока монтажно-демонтажных работ, умень7 16 шение потерь полезного ископаемого и повышение безопасности работ. Способ перемонтажа МК комплекса 2 у геологического нарушения включает проведение демон- тажной камеры 6 у границы нарушений и монтажной камеры 7 за пределами геологического нарушения. Между последним и монтажной камерой 7 оставляют целик 9. Одновременно с проведением камер 6 и 7 в них производят подрывку пород почвы. После этого в камерах 6, 7 и на вентиляционном штреке устанавливают рельсовый путь 8. Затем с помощью бурошнековых машин осуществляют выемку целика 9. После выемки целика 9 осуществляют перемонтаж МК, для чего на рельсовом пути 8 в демонтажной камере 6 устанавливают платформы, перемещение МК осуществляют лебедкой 15. Перед погрузкой МК на платформы секции устанавливают перед передними торцами последних на уровне нижних плоскостей их оснований. При погрузке и разгрузке секции перемещают в направлении, перпендикулярном рельсовому пути камеры, располагая основания секции перпендикулярно продольным осям платформы. 7 ил. 15 .8 € 4 05 (риг.1
фиг.2
11
20
. 7 /
ч, /Х;
.
/4
8
20
- „„...L I/I J,
6-6
дуигЛ
/J
Г9
сриг.д
(риг.7
| Поточная линия для монтажа механизированныхуглЕдОбыВАющиХ КОМплЕКСОВ | 1977 |
|
SU812933A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Негруцкий Б | |||
| Ф | |||
| Интенсификация монтажа оборудования шахт | |||
| М.: Недра, 1983, с | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Курушкин С- И | |||
| Скоростной перемонтаж механизированных комплексов | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
