Изобретение относится к технике автоматического регулирования и может быть применено при регулировании различных процессов в теплоэнергетике, химии и других отраслях промышленности, в случае, если в контуре регулирования имеется чистое запаздывание.
Целью изобретения является повышение точности регулирования.
На фиг. 1 и 2 показано предлагаемое устройство; на фиг. 3 - временные
графики процессов регулирования. I
Регулятор (фиг. 1) содержит задатчик 1 регулируемого параметра, элемент 2 сравнения, двухпозиционный ре- лейньй блок 3, формирователи 4 и 5 импульсов, выполняющие функции выработки импульсов соответственно по пе
реднему и заднему фронтам, первый
третий триггеры 6-8, генератор 9 импульсов, первый и второй счетчики 10 и 11 импульсов, первый - четвертый элементы И 12 - 15, первый - пятый элементы ИЛИ 16 - 20, первую - четвертую схемы 21-24 сравнения параллельного кода, пятый - восьмой элементы И 25 - 28,шестой и седьмой элементы ИЛИ 29 и 30, первый и второй усилители 31 и 32 мощности, выполненные в виде ключевых элементов. В процессе регулирования регулятором осуществляется управление перемещением исполнительного механизма 33 постоянной скорости. На фиг. 2 показаны схемы 21 - 24 сравнения параллельного кода, каждая из которых состоит из тумблеров 34 - 37, имеющих вькоды по количеству разрядов задаваемого кода (в нашем примере четьфе разряда) и соответствующие им двойные входы. Вторые входы тумблеров 34-37 подключены к источнику напряжения +5 В.
В качестве формиро вателей импульсов могут быть использованы одновиб- раторы.
Работа регулятора осуществляется следующим образом.
Формирователи 4 и 5 импульсов настроены на срабатьтание соответственно по переднему и заднему фронтам. Подключение питания к первой обмотке исполнительного механизма 33 обеспечивает увеличение регулируемого параметра, а к второй обмотке - его уменьшение. На вход регулятора, яв- ляюшийся первым входом элемента 2 сравнения,поступает сигнал от датчик регулируемого параметра Vp. На второ
вход элемента 2 сравнения поступает сигнал V от задатчика 1 регулируемого параметра. Сигнал рассогласования VQ, равный разности между заданным Vi и текушим VP значениями регулируемого параметра, поступает на вход двухпозиционного релейного блока 3. В зависимости от знака сигнала рассогласования на выходе двухпозиционного релейного блока 3 всегда присутствует сигнал V положительного или нулевого уровня.
Дальнейшую работу системы рассмотрим на примере, когда объект управления можно характеризовать в виде последовательного соединения безынердао ного усилительного звена и звена за- паздьУвания. I
Пусть в соответствии с фиг. 3 в
начальный момент система отрабатывает управляющее или возмущающее воздействия из положения, когда значение регулируемого параметра ниже заданного значения. Пусть к начальному моменту регулятор уже отработал корректирующее воздействие. При наличии в системе запаздывания информация об измене.нии регулируемого параметра на вход регулятора поступает с задержкой, равной времени запаздьшания На фиг. 3 пунктирной линией изображен процесс изменения параметра на выходе объекта, а сплошной - на вход регулятора в предположении, что запаздывание включено между выходом .объекта и входом регулятора. В момен времени, когда значение сигнала на входе регулятора Vp становится равным значению сигнала V (точка А, на фиг. 3), происходит изменение состояния двухпозиционного релейного блока 3 и на его выходе сигнал V поло- жит ельного уровня изменяется до нулевого уровня. Б момент снижения сигнала до нулевого уровня по заднем фронту запускается формирователь 5 и на его выходе появляется импульс, который переводит триггеры 6-8 в нулевое состояние, а счетчики 10 и 11 импульсов обнуляет. Сигналы V и V4 с выходов триггера 7 соответственно подаются на усилители 31 и 32, осуществляя переключение питающего напряжения V на вторую обмотку исполнительного механизма 33 и обеспечивая тем самым уменьшение регулируемого параметра. Одновременно сигналы с инверсных выходов триггеров 6-8
разрешают прохождение импульсов от генератора 9 импульсов через элемент И 13 и элемент ИЛИ 16 на счетный вход счетчика 10. Сигнал с инверсного выхода триггера 7 также разрешает работу элемента И 26, Цифровой код на выходных шинах счетчика 10 начинает изменяться, и по истечении времени tj его значение становится равным коду на схеме 22 сраБнения параллельного кода, срабатывает элемент И 26 и на ее выходе появляется сигнал., который обнуляет счетчик 10 и переводит триггер 7 в нулевое состояние. Сигналы V и V осуществляют переключение питающего напряжения V, на первую обмотку исполнительного механизма 33 и обеспечивают тем самым увеличение регулируемого параметра (точ- ка А4 на фиг. 3 - начало корректирующего воздействия). Одновременно нулевой уровень сигнала с инверсного выхода триггера 7 блокирует доступ импульсов на счетчик 10 от генератора 9 импульсов через элемент И 13, а высокий уровень сигналов с прямого выхода триггера 7 и с инверсных выходов
Триггеров 6 и 8 разрещает прохождение импульсов от генератора: 9 импульсов через элемент И 15 и элемент ИЛИ 17 на счетный вход счетчика 11. Сигнал с инверсного выхода триггера 8 также разрешает работу элемента И 28. По истечении времени J , , равного времени заполнения емкости счет- чика 11 до значения, соответствующего коду на задатчике 2А параллельного кода, на выходе элемента И 28 вы- раб|атывается импульс, который обнуляет счетчик 11, а триггеры 7 и 8 пере- водит соответственно в нулевое и единичное состояния, обеспечивая тем самым переключение питающего напряжения Vy, на BTopyio обмотку исполнительного механизма, вновь уменьшающего регулируемый параметр (точка А4 на . фиг. 3 - конец корректирующего воз- действия), и осуществляя запрет на прохождение импульсов через элемент И 15 от генератора 9 импульсов. Сни- жение регулируемого параметра происходит до момента времени, когда вновь произойдет изменение састояния двух- позиционного релейного блока 3 (точка А на фиг. 3), после чего в сие- теме устанавливается автоколебательный процесс.
Пусть в момент времени, соответствующий точке АЗ, на фиг. 3 произойдет смена заданного значения регулируемого параметра. Новая ось коор- динат на фиг. 3 показана пунктирной линией.-До момента смены заданного значения произошло срабатывание позиционного релейного блока 3 (точка А,о на фиг. 3) и, по аналогии с процессом регулирования относительно точки А,, через промежуток времени t, регулятором вырабатывается корректирующий импульс длительностью у, , по окончании которого вновь происходит , уменьшение регулируемого параметра. Снижение регулируемого параметра происходит до момента времени, когда произойдет изменение состояния двух- позищ онного релейного блока 3 (точка А,, на фиг. 3), осуществляющее запуск по переднему фронту формирователя 4 и перевод триггеров 6-8 сигналом V. в единичное состояние. Сигналы V, и V4 с выходов триггера 7 осу- ществляют переключение питающего напряжения Vj, на первую обмотку исполнительного механизма 33, обеспечивая увеличение регулируемого параметра, а сигналы с прямых выходов триггеров 6-8 разрешают прохождение импульсов от генератора импульсов через элемент И 12 и элемент ИЛИ 16 на счетный вход счетчика 10 импульсов.
Сигналы с прямых вькодов триггеров 7 и 8 также разрешают работу соответственно элементов И 25 и 27. По (истечении времени t импульс на выходе элемента И 25 изменяет состояние триггера 7 на противоположное, обеспечивая тем самым переключение исполнительного механизма 33 на уменьшение регулируемого параметра и осуществляя запрет прохождения импульсов через элемент И 12 и разрешение прохождения импульсов через элемент И 14 на счетный вход счетчика 11. По истечении времени импульс на выходе элемен- та И 27 изменяет на противоположное состояния триггеров 7 и 8, чем обеспечивает переключение исполнительного механизма на увеличение регулируемого параметра и блокирует доступ импульсов к счетчикам 10, 11 от генератора 9 импульсов. Увеличение регулируемого параметра происходит до момента времени, когда.вновь произойдет изменение состояния поз ционно- го релейного блока 3 (точка А, на |фиг. 3), после чего в системе устана- вливается автоколебательньй процесс.
Обеспечение наибольшей точности регулирования в установившемся режиме достигается настройкой схемы следующим образом.
Выдержки времени у, и t, или J tj, по истечении которьк происходит заполнение счетчиков до значений соответствующих кодов, выбираются такими, чтобы значения регулируемого параметра на выходе объекта в момент выработки корректирующего воздействи (импульса с выхода элементов И 25 или 26 - точки А4 и А; на фиг. 3) и последующего срабатывания двухпози- ционного релейного блока (точки А и А, на фиг. 3) были равны. В соответствии с фиг. 3 равные значения регулируемого параметра должны соответствовать точкам А, Ag и А, Aq. Необходимо, чтобы были равны также и интервал времени между моментом перехода регулируемого параметра во время корректирующего воздействия через заданное значение и концом корректирующего воздействия и интервал времени между моментом перехода регулируемого параметра после окончания ко1)ректирующего воздействия через заданное значение и последующим срабатыванием позиционного блока 3, т.е.
ч
ч.
или
ч
tg. Осуществление
корректирующего воздействия при обеспечении указанных условий соответствует тому, что сигналы на входе регу- лятора с запаздыванием, повторяя изменение регулир-уемого параметра во время корректирующего воздействия, осуществляют выработку управляющих воздействий, которые, в свою очередь изменяют регулируемый параметр, как и при корректирующем воздействии, В дальнейшем процесс повторяется, и в САР устанавливается айтоколебатель-
35-1 40
импульсов до значений, задаваемых схемами 21 и 22 сравнения параллельного кода, и, следовательно, выработ- ка импульсов на начало корректирующего воздействия не происходит.
В с оответствии с фиг. 2, задание параллельного кода осуществляется тумблерами 34 - 37 таким образом,
0 чтобы коммутация выходов тумблеров для нулевых разрядов кода осуществлялась через вторые входы тумблеров подключенных к питанию +5 В (уровень 1), а для единичных разрядов кода 15 через первые входы, подключенные к выходным щинам счетчиков 10 или 11. Так, в нашем примере (фиг. 2) на схеме 21 сравнения параллельного кода )влeн код 0110, т.е. выходы
20 тумблеров 34 и 37 подключены к источнику питания +5 В, а выходы тум Злеров 35 и 36 подключены к второй и третьей выходным щинам счетчика 10. Код 0110 двоичной системы счисления соответст25 вует числу. 6 десятичной системы счисления. Таким образом, при заполнении счетчика 10 шестью импульсами от генератора 9 импульсов на его выходных шинах образуется код 0110, который
30 совместно с единичными сигналами на выходах тумблеров 35 и 37 преобразуется в код-1111, необходимый для срабатывания элемента И 25.
1
Формула изобретения.
Позиционный регулятор для систем с с запаздыванием, содержащий задатчик регулируемого параметра, элемент сравнения, позиционный релейный блок, первый и второй усилители мощности, подключенные выходами к соответствующим входам иЪполнительного механизма. Триггер, три -элемента ИЛИ и два элемента И, причем первый вход эле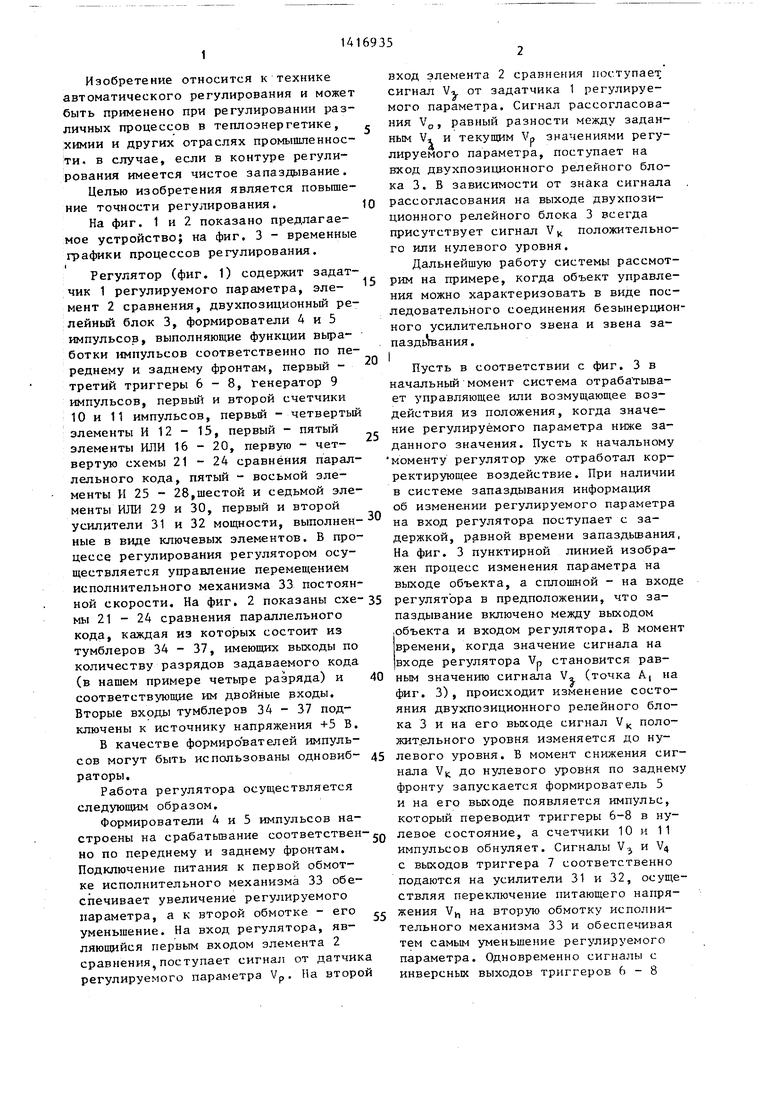


| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416934A1 |
| Импульсный регулятор | 1980 |
|
SU947824A1 |
| Адаптивное устройство для обучения языкам | 1987 |
|
SU1441445A1 |
| Многопрограммный регулятор температуры | 1983 |
|
SU1087951A1 |
| МНОГОУРОВНЕВЫЙ СТАТИСТИЧЕСКИЙ АНАЛИЗАТОР ДЛИТЕЛЬНОСТИ ВЫБРОСОВ И ПРОВАЛОВ НАПРЯЖЕНИЯ | 1991 |
|
RU2054195C1 |
| Устройство для обслуживания запросов | 1989 |
|
SU1741132A1 |
| СПОСОБ СТАБИЛИЗАЦИИ И ПОДГОНКИ ТОНКОПЛЕНОЧНЫХ РЕЗИСТОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2306625C1 |
| Релейно-импульсный регулятор тока тягового электродвигателя постоянного тока | 1989 |
|
SU1614966A1 |
| РАСПРЕДЕЛИТЕЛЬ ИМПУЛЬСОВ ДЛЯ УПРАВЛЕНИЯ ЧЕТЫРЕХФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2133550C1 |
| ФОРМИРОВАТЕЛЬ КОМАНД УПРАВЛЕНИЯ | 2003 |
|
RU2244960C2 |

Изобретение относится к техническим средствам систем автоматичес кого управления и может быть использовано для регулирования различных процессов в теплоэнергетике. Целью изобретения является -повышение точности регулирования при работе в двухпозиционном режиме управления за счет компенсации влияния запаздывания при осуществлении корректирующих воздействий в интервалы времени запаздывания срабатывания регулятора. Регулятор содержит задатчик регулируемого параметра, элемент сравнения, позиционный релейный блок, усилители мощности, управляющие работой исполнительного механизма, первый и второй формирователи импульсов соответственно по переднему и заднему фронтам, первьй, второй и третий триггеры, осуществляющие управление работой схемы, а также генератор импульсов, первьй и второй счетчики импульсов, четыре схемы сравнения параллельного кода и восемь элементов И. Причем четыре схемы сравнения и четыре элемента И выполняют роль времязадающих элементов. Импульс с выхода пятого или шестого элемента И обеспечивает начало корректирующего воздействия, а с выхода седьмого или восьмого элемента. И - его окончание. Выходы второго триггера также управляют работой усилителей мощности. 3 ил. сл
ный процесс с параметрами корректиру- 45 мента сравнения соединен с выходом
ющего воздействия (точки А4, Ад и А, АО на фиг. 3). Следует отметить, что дальнейшая работа регулятора происходит без корректирующих воздействий, т.е. без сигналов управления, вырабатываемых схемой регулятора в интервалы времени между срабатываниями двухпозиционного релейного блока 3. 3to происходит потому, что при устазадатчика, второй - с входом регулируемого параметра регулятора, а выход - с входом позиционного релейного блока, .отличающийся 50 тем, что, с целью повышения точности регулирования, в него введены два формирователя импульсов, генератор импульсов, второй и третий триггеры, два счетчика импульсов, четвертый.
новившемся автоколебательном процессе 55 пятый, шестой и седьмой элементы ИЛИ, интервалы времени между срабатывани- третий, четвертый, пятый, шестой, седьмой и восьмой элементы И и четыре схемы сравнения параллельного кода,
ями двухпозиционного релейного блока
3 становятся меньше времени t и t,
необходимого на заполнение счетчика 10, причем позиционный релейный блок вызадатчика, второй - с входом регулируемого параметра регулятора, а выход - с входом позиционного релейного блока, .отличающийся 50 тем, что, с целью повышения точности регулирования, в него введены два формирователя импульсов, генератор импульсов, второй и третий триггеры, два счетчика импульсов, четвертый.
полней в виде двухпозшдюнного релейного блока, выход которого подключен к входу первого формирователя импульсов и к входу второго формирователя импульсов, выход первого формирователя импульсов подключен к уста- jHOBo4HbiM входам первого, второго и третьего триггеров, к первым входам четвертого и пятого элементов ИЛИ, выход -второго формирователя импульсов подключен к вторым входам- четвертого и пятого элементов ИЛИ, к входам. сброса первого, второго и третьего триггеров, выходы четвертого и пятого элементов ИЛИ подкпючены соответственно к обнуляющим входам первого и второго счетчиков импульсов, счетные входы которых подключены соответственно к выходам первого и второго элементов ИЛИ, первые входы которых подключены соответственно к выходам первого и третьего элементов И, а вторые- входы - соответственно к выходам второго и четвертого элементов И, выходы первого счетчика импульсов соединены с соответствующими входами первой и второй схем сравнения па раллельного кода, выходы второго счетчика импульсов соединены с соответствующими входами третьей и четвертой схем сравнения параллельного кода, выходы первой, второй, третьей и четвертой схем сравнения параллельного кода подключены соответственно к входам пятого, шестого, седьмого и восьмого элементов И, выходы пятого и шестого элементов И подключены соответственно к первому и второму
5
0
входам шестого элемента ИЛИ, выход которого подключен к третьему входу четвертого элемента ИЛИ и к первому входу третьего элемента ИЛИ, выходы седьмо о и восьмого элементов И подключены соответственно к первому и второму входам седьмого элемента ИЖ, выход которого соединен с вторым вхо- дом третьего элемента ИЛИ, с третьим входом пятого.элемента ИЛИ и со счетным входом третьего триггера, выход третьего элемента ИЛИ подключен к счетному входу второго триггера, инверсный вькод которого соединен с третьими входами первого и четвертого элементов И, с дополнительным входом шестого элемента И, а также с входом второго усилит.еля мощности, прямой вькод второго триггера соединен с третьими входами второго и третьего элементов И, с дополнительным входом пятого элемента И, а также с входом первого усилителя мощности, прямой выход третьего триггера подключен к четвертому входу первого элемента И и к дополнительному входу седьмого элемента И, инверсный вьрсод третьего триггера соединен с четвертым входом второго элемента И и с дополнительным входом восьмого элемента И, прямой выход первого триггера подключен к первым входам первого и третьего элементов И, а инверсный выход - к первым входам второго и четвертого элементов И, вторые входы первого, второго, третьего и четвертого элементов И соединены с выходом генератора импульсо в.
5
0
5
VH
Ш
vi
ri
G
Iff
/2
f3
Щ
t5
vi
Ф 3/
33
32
/v
V
M
ff 2II
Hill tL
25
22
25
20
11
гь
27
24
гь
.1
s с
я
| Турецкий X | |||
| Анализ и синтез сис- те управления с запаздыванием | |||
| М.: Машиностроение, 1974, с | |||
| Автоматический тормоз к граммофону | 1921 |
|
SU303A1 |
| К | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
