Од
Од
4;
Изобретение относится к химической и теплоэнергетической технике и может быть использовано при регулировании температуры конечного продукта в различного рода системах.
Целью изобретения является повышение точности регулятора.
На фиг. 1 приведена принципиальная схема регулятора; на фиг. 2 и 3 - эпюры сигналов, иллюстрирующие работу регулятора.
Устройство содержит задатчик 1, блок 2 сравнения, релейный блок 3, первый и второй формирователи 4, 5 импульсов, второй и первый RS-тригге- ры 6, 7, первый и второй генераторы 8, 9 импульсов, первый и второй счетчики 10, 11 импульсов, первый и второй элементы И 12, 13, первый - тре- тий элементы ИЛИ 14 - 16, первый и второй усилители 17, 18 мощности, исполнительный механизм 19, конденсатор 20, обмотки 21, 22 управления исполнительного механизма 19, якорь 23 исполнительного механизма 19, датчик
24,первый и второй входы Питание
25,26 регулятора.
На фиг. 2 и 3 обозначены: U, - напряжение питания; выходной сигнал i-ro блока регулятора, t и V - выдержки времени.
В качестве формирователей импульсов могут быть использованы одновиб- раторы. Триггеры, элементы И, ИЛИ, а также одновибраторы, генераторы импульсов и счетчики импульсов могут быть реализованы на интегральных микросхемах, специально предназначенных для выполнения функций указанных эле- ментов. ..
Регулятор работает следующим образом.
Формирователи 4, 5 импульсов настроены на срабатывание соответственно по заднему и переднему фронту. Подключение напряжения питания 9 к первой обмотке 21 управления механизма 19 обеспечивает увеличение регулируемого параметра (фиг. 2). На вход Регулятора поступает сигнал U с выхода датчика 24. Этот сигнал поступает на первый вход блока 2 сравнения, на второй вход которого поступает выходной сигнал задатчика 1. Сигнал рас согласования U, равный разности между заданным U, и текущим Uj значениями регулируемого параметра, поступает на вход релейного блока 3. В за
5 0 5
0 Q
5 п с
5
висимости от знака сигнала рассогласования и на выходах позиционного блока 3 всегда присутствует сигнал Uj положительного уровня (или U, нулевого уровня).
Дальнейшую работу регулятора рассмотрим на примере, когда объект управления можно характеризовать безынерционным усилительным звеном. Такой пример соответствует системам регулирования температуры на основе смещения двух теплоносителей с различной температурой, различным системам регулирования расхода и т.д. Предположим, что в начальный момент отработки управляющего или возмущающего воз- дейст ия значение регулируемого параметра ниже заданного значения. В этом случае на выходе позиционного блока 3 формируется кусочно-постоянный сигнал положительной полярности. В момент формирования сигнала Uj положительной полярности по переднему фронту запускается формирователь 5 импульсов и на его выходе появляется импульс, который обнуляет счетчики 10, 11 импульсов и переводит RS-триггер 6 в нулевое состояние, а RS-триггер 7 в единичное состояние. Сигнал U, с прямого выхода RS-триггера 7 замыкает уси/j
литель 17 мощности, а сигнал U с инверсного выхода размыкает усилитель 18 мощности. В результате напряжение питания Un поступает на первую обмотку 21 управления исполнительного механизма 19 и начинается его перемещение в противоположном направлении, обеспечивающее увеличение регулируемого параметра, на выходе объекта.
При наличии в системе запаздывания информация. об этом на вход регу- лятора поступает с задержкой, равной времени запаздывания. На фиг. 2 пунктирной линией изображен процесс изменения параметра на выходе объекта, а сплошной - на входе регулятора в предположении, что запаздывание включено между выходом объекта и входом регулятора. В момент времени, когда значение сигнала U становится равным значению сигнала U, (точка А, на фиг. 2), происходит изменение состояния позиционного блока 3. Значение сигнала Uj становится равным нулю, и по заднему фронту запускается формирователь 4 импульсов. Сигнал с выхода формирователя 4 импульсов переводит RS-триггер 6 в единичное соетояние, а RS-триггер 7 - в нулевое - состояние. Сигналы U и U с выходов RS-триггера 7 замыкают усилитель 18 мощности и размыкают усилитель 17
-
мо
ности, осуществляя переключение питающего напряжения на вторую обмотку 22 управления исполнительного механизма 19. Одновременно сигналы с пря-
16934
счетчиков 10, 11 импульсо-в, выбираются такими, чтобы изменение регулиру:- емого параметра в интервал времени между выработкой импульсов счетчиками 10, 11 импульсов (началом и концом корректирующего воздействия) и в интервал времени между выработкой импульса счетчиком 11 импульсов (ко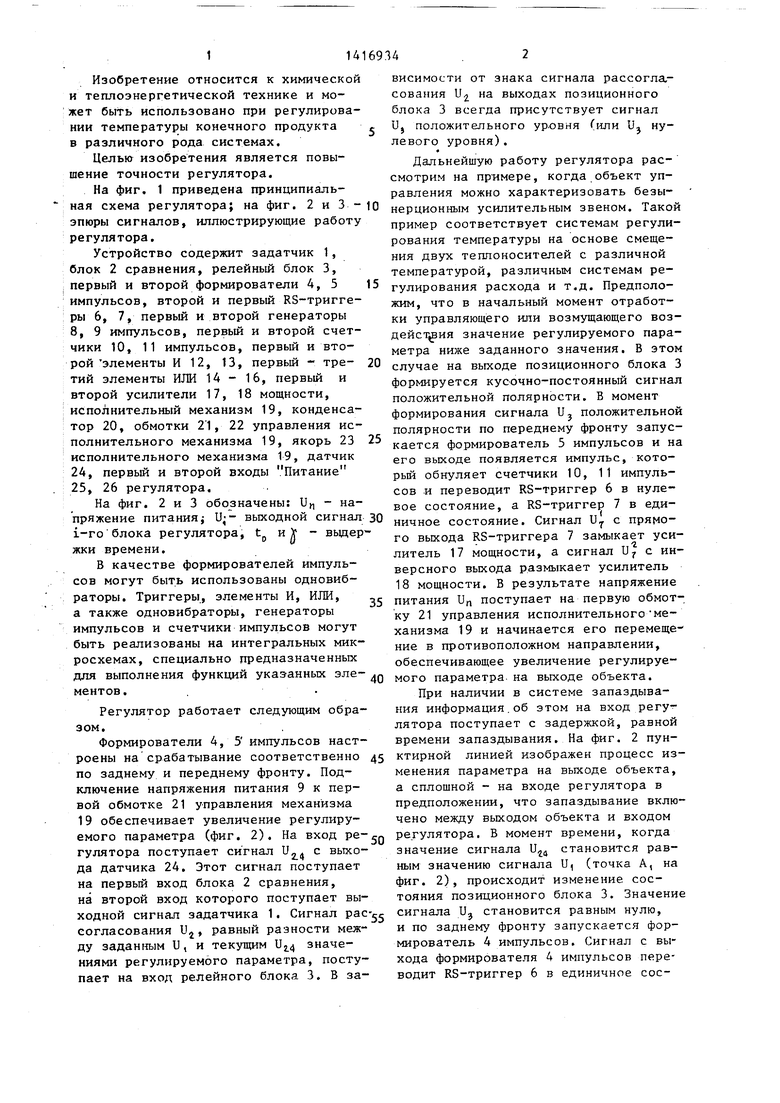


| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1982 |
|
SU1105859A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416935A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Импульсный регулятор | 1982 |
|
SU1101787A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Позиционный регулятор для систем с запаздыванием | 1987 |
|
SU1427328A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Позиционный регулятор | 1985 |
|
SU1303992A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1439530A1 |
| Цифровой регулятор | 1984 |
|
SU1247836A1 |


Изобретение относится к области химической и теплоэнергетической техники и может быть использовано при регулировании температуры конечного продукта в различного рода смесителях. Целью изобретения является повышение точности регулятора, которое достигается за счет введения в регулятор двух реле времени, выполненных на счетчиках импульсов, которые обеспечивают в регуляторе автоколебательный установившийся режим за счет формирования корректирующих воздействий, не зависящих от динамических характеристик системы управления. Формирование корректирующих воздействий начинается сразу после первой полуволны колебательного переходного процесса. 3 ип. S
мого выхода RS-триггера бис инверс- Q нец корректирующего воздействия) и
15
20
25
30
ного выхода RS-триггера 7 разрешают прохождение импульсов с выхода генератора 8 импульсов через третий вход элемента И 12 на информационный вход счетчика 10 импульсов. По истечении времени t происходит переполнение счетчика 10 импульсов и на его выходе вЁфабатывается импульс, который переводит RS-триггер 7 в единичное состояние, осуществляя тем самым переключение питающего напряжения и„ иа первую обмотку 21 управления исполнительного механизма 19. Одновременно сигналы с прямых выходов RS- 7риггеров 6 и 7 разрешают прохожде- {1ие импульсов с выхода генератора 9 мпyльcoв через третий вход элемента И 13 на информационный вход счетчика 11 импульсов, а сигнал с инверсного выхода RS-триггера 7 запрещает прохождение импульсов с выхода генератора 8 импульсов на информационный вход счетчика 10 импульсов. По истечении времени у, равного времени заполнения емкости счетчика импульсов 11 импульсами с выхода генератора 9 импульсов, на выходе счетчика 11 импульсов вырабатывается импульс, который через,вторые входы элементов ИЛИ 14,.; 15 переводит RS-триггеры 6 и 7 в дулевое состояние, тем самым запрещая дальнейший счет импульсов счетчиками 10, 11 импульсов и переключая напряжение питания вновь на вторую обмотку 22 управления исполнительного механизма 19, чем обеспечивает снижение регулируемого параметра. Снижение регулируемого параметра происходит до момента времени, когда вновь произойдет изменение состояния позиционного элемента 3 (точка А на фиг. 2), после чего в регуляторе устанавливается автоколебательный процесс.
Обеспечение наибольшей точности регулирования в установившемся режиме ее достигается настройкой регулятора следующим образом.
Вьщержки времени t и J , по истечении которых происходит переполнение
35
40
45
последуюЕПИм срабатыванием позиционного блока 3 происходило симметричн относительно заданного значения и н -одинаковые значения амплитуд. Осуще ствление корректирующего воздействи при Збеспечении указанных условий с ответствует тому, что сигналы на вх де регулятора с запаздыванием €, по вторяя изменение регулируемого пара метра во время корректирующего воздействия, осуществляют выработку уп равляющих воздействий, которые, в свою очередь, изменяют регулируемый параметр, как и при корректирующем воздействии, на равные значения амплитуд и симметрично .относительно з данного значения. В дальнейшем проц повторяется и в регуляторе устанавл вается автоколебательный процесс с параметрами корректирующего воздействия (точки А и Aj на фиг. 2), со ответствующими пятикратному снижени амплитуды отклонения регулируемого параметра от заданного значения, т. пятикратному увеличению динамическо точности при абсолютно статической точности. Следует отметить, что дал нейшая работа регулятора происходит без корректирующих воздействий, т.е без сигналов управления, вырабатыва мых регулятором в интервалы времени между срабатываниями позиционного б ка 3. Это происходит потому, что пр установившемся автоколебательном п цессе интервал времени между срабат ваниями позиционного блока 3 станов ся меньше времени tg, необходимого заполнение счетчика 10 импульсов и выработки импульса на начало коррек тирующего воздействия.
Если в результате вoз fyщaющeгo в действия или при изменении заданног значения (уставки) процесс выйдет и установившегося состояния (на фиг.2 пунктиром показан перенос осей коор динат при изменении заданного значе ния и в момент времени, соответствующий точке АЭ), то новое корректи рующее воздействие установит в регу
5
0
5
0
е
5
0
5
последуюЕПИм срабатыванием позиционного блока 3 происходило симметрично относительно заданного значения и на -одинаковые значения амплитуд. Осуществление корректирующего воздействия при Збеспечении указанных условий соответствует тому, что сигналы на входе регулятора с запаздыванием €, повторяя изменение регулируемого параметра во время корректирующего воздействия, осуществляют выработку управляющих воздействий, которые, в свою очередь, изменяют регулируемый параметр, как и при корректирующем воздействии, на равные значения амплитуд и симметрично .относительно заданного значения. В дальнейшем процесс повторяется и в регуляторе устанавливается автоколебательный процесс с параметрами корректирующего воздействия (точки А и Aj на фиг. 2), соответствующими пятикратному снижению амплитуды отклонения регулируемого параметра от заданного значения, т.е. пятикратному увеличению динамической точности при абсолютно статической точности. Следует отметить, что дальнейшая работа регулятора происходит без корректирующих воздействий, т.е. без сигналов управления, вырабатываемых регулятором в интервалы времени между срабатываниями позиционного бло- ка 3. Это происходит потому, что при установившемся автоколебательном процессе интервал времени между срабатываниями позиционного блока 3 становится меньше времени tg, необходимого на заполнение счетчика 10 импульсов и выработки импульса на начало корректирующего воздействия.
Если в результате вoз fyщaющeгo воздействия или при изменении заданного значения (уставки) процесс выйдет из установившегося состояния (на фиг.2 пунктиром показан перенос осей координат при изменении заданного значения и в момент времени, соответствующий точке АЭ), то новое корректирующее воздействие установит в регуляторе аналогичный установившийся автоколебательный процесс.
Работа регулятора в другом режиме происходит аналогичном образом. Однако настройка схемы произведена таким образом, что срабатывание формирователей 4, 5 импульсов осуществляется соответственно по переднему и заднему фронту, а подключение питания Up к первой обмотке 21 управления исполнительного механизма 19 обеспечивает снижение регулируемого параметра (фиг. 3). В связи с этим отсчет времени на начало корректирующего в,оздей-15 и задатчик, соединенные выходами с
ствия происходит при смене знака сигнала рассогласования с отрицательного на положительный (точка А на фиг.З) Процесс регулирования при отработке задающего воздействия из положения, когда значение регулируемого параметра меньше заданного значения и при настройке регулятора в соответствии с фиг, 3jпроисходит аналогично, с тем отличием, что-в начальный период несколько увеличивается время регулирования из-за наличия других начальных условий. В этом случае переходный процесс имеет вид, представленный на фиг. 3, а установившийся автоколебательный процесс характеризуется теми же параметрами (точки АО и А,д) . Наличие начальных условий, увеличивающих время регулирования в начальный период, характерно и для регулятора, настроенного в соответствии с фиг. 2, в случае отработки задающего воздействия из положения, при котором значение регулируемого параметра больше, чем заданное значение. Выбор вариантов настройки регулятора (в соответствии с фиг. 2 или 3) не име.ет решающего значения, т.к. эффект от использования регулятора абсолютно идентичен для обоих вариантов настройки.
Указанные отличительные особенности позволяют в пять раз повысить динамическую точность и практически обеспечить абсоли гную статическую точность по сравнению с известными тех- ничecки ш решениями.
Формула изобретения
Позиционный регулятор для систем с запаздашанием, содержащий первый.
второй и третий элементы ИЛИ, первый формирователь импульсов, первый RG- триггер, соединенный инверсным и пря- выходами с первыми входами соответственно первого и второго элементов И, первый и второй ключевые усилители мощности, подключенные информационными входами к первому входу Питание регулятора, а выходами - соответственно к первому и второму входам исполнительного механизма, подключенного третьим входом к второму входу Питание регулятора, датчик
0
5
0
5
0
5
0
5
соответствующими входами блока сравнения, подключенного выходом к входу релейного блока, отличающий- с я стем, что, с целью повышения точности регулятора, в нем дополнительно установлены первый и второй генераторы импульсов, второй RS-триггер, первый и второй счетчики импульсов и второй формирователь импульсов, соединенный входом с выходом релейного блока и с входом второго формирователя импульсов, а выходом - с первым входом третьего элемента ИЛИ, с обнуляющими входами первого и второго счетчиков импульсов и с первым входом первого элемента ИЛИ, подключенного вторым- входом к выходу второго счетчика импульсов и к первому входу второго элемента ИЛИ, а выходом - к R-входу второго RS-триггера, соединенного S-входом с выходом первого формирователя импульсов и с вторым входом второго элемента ИЛИ, а прямым выходом с вторым выходом второго элемента И и с вторым входом первого элемента И, подключенного третьим входом к выходу первого генератора импульсов, а выходом - к информационному входу первого счетчика импульсов, соединенного выходом с вторым входом третьего элемента ИЛИ, подключенного выходом к S-входу второго RS-триггера, соединенного R-входом с выходом второго элемента ИЛИ, а прямым и инверсным выходами с управляющими входами соответственно первого и второго ключевых усилителей мощности, третий вход второго элемента И подключен к вьпсоду второго генератора импульсов, а выход- к информационному входу второго счетчика импульсов.
V/
II I 111 I I
i .
H-f
I I I
iiimiiiijii niiiiiiiiiiiiiiiiiiiiiiiiii|iiiii|ii|iilii|iL/
ЯВЙНЙШШИШИ
I 1 I i I i I , BMffliifflgaiiiiiigiiiiiiiiiiiiiiiiiiiiiiiaiiiiiiHiiiiiiiiBiiiiiiiiiBiiiiiiiiiiiiiiiiiiiimiiiiL
I I I I I
IIUIIII 1 Jllh
11 « I I
t-MП r
I I I
I I
Фи9.2
I / / fj у 11
Гл / I
H/t,V
i i 111 I
{
и
-жI I
I I i
t
I I I
I ll n i.
llllllll
I ili il.
f , I
./
LULL 11111Я
П n
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283711A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Импульсный регулятор | 1982 |
|
SU1105859A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| .Авторское свидетельство СССР , К 1259208, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
