Изобретение относится к технике автоматическог о регулирования и может быть применено при регулировании разли пгых процессов в теплоэнергетике, химии и других отраслях про- мьши енности в случае, если в контуре регулирования имеется чистое запаздывание .
Цель изобретения - упрощение конструкции и расширение области применения устройства.
На фиг.1. приведен пример практической реализации предложенного устройства; на фиг, 2 - временной график процесса регулирования при использовании предложенного устройства; на фиг, 3 - фазовый портрет системы автоматического регулирования при использовании предложенного устройства.
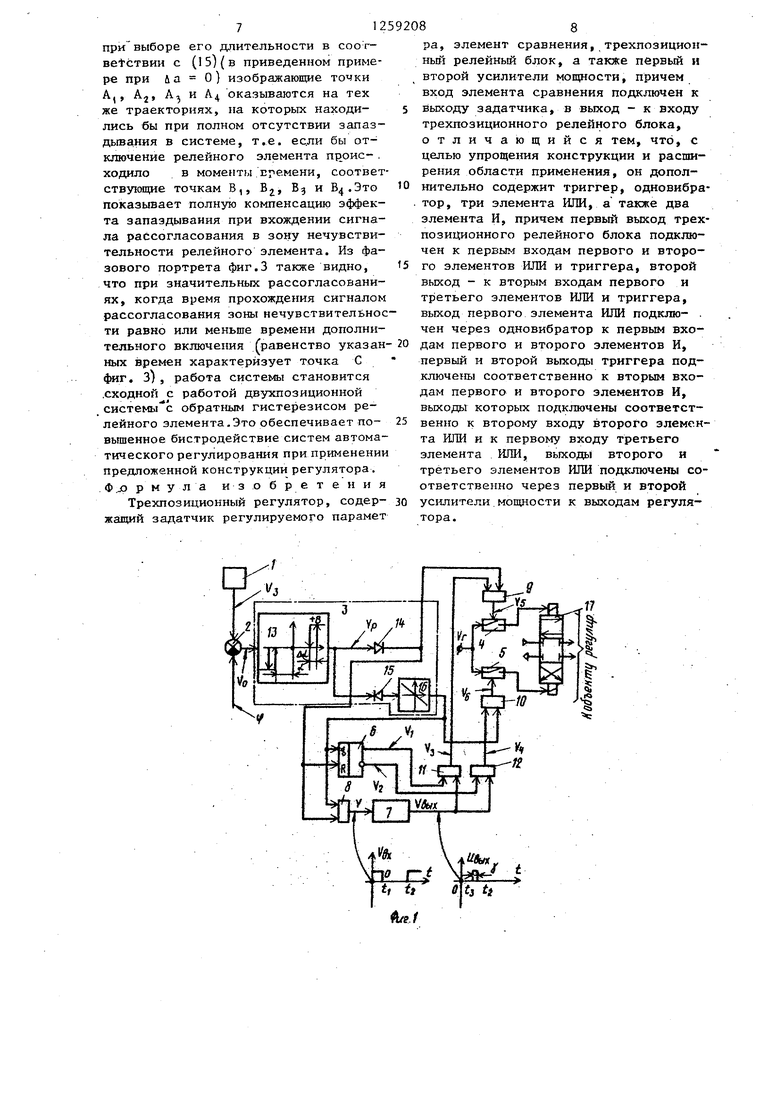
Регулятор содержит задатчик 1 регулируемого параметра, элемент 2 сравнения, трехпозиционный релейны11 блок 3, первьй и второй усилители 4 и 5 мощности, триггер 6, одновиб- ратор 7, первьй, BTopoii и третий элементы ШШ 8-10, первый и второй элементы И 11 и 12, Трехпозиционный ре- лейньш блок 3 содержит нелинейньп элемент 13, первый и второй вентильные элементы 14 и 15 и инвертор 16,
В качестве усилителей 4 и 5 мощности используются ключевые элементы. Регулятор управляет работой исполнительного устройства 17,
Работа регулятора осуществляется следующим образом,
На вход регулятора поступает сигнал cf , пропорциональньш текущему значеншо регулируемого параметра, За датчиком 1 осуществляется установка заданного значения регулируемого параметра. На выходе элемента 2 сравнения формируется сигнал рассогласования V , лропорциональный разности между заданным и текущим значениями, регулируемого параметра. Сигнал V поступает на вход нелинейного элемента 13, обладающего характеристикой трехпозиционного релейного элемента, в общем имеющего зону нечувствительности а и гистерезис д а В случае, если сигнал V на входе нелинейного элемента I3 находится в пределах его зоны нечувствительности (а +U а), сигнал Vp на выходе нелинейного элемента 13 равен О, усилители 4 и 5 отключены и подачи управляющего вoздeйcтв rя на исполнительное устройство не происходит.
При превьш1ении сигналом рассогласования Vj, зоны нечувствительности нелинейного элемента 13 происходит срабатывание последнего. Например, в случае, если регулируемый параметр меньше, чем заданное значение, на выходе трехпозиционного релейного блока 3 формируется кусочно- постоянный сигнал положительной полярности. Сигнал р положительной полярности проходит через вентильный элемент 1А на первые входы элементов
ИЛИ 8 и 9 и на К.-вход триггера 6,Сигнал Vj поступает с вьосода элемента ИЛИ 9 на управляющий вход усилителя 4, который подключает исполнительное устройство 17 к цепи питания, вызывая изменение регулируемого параметра в сторону уменьшения сигнала рассогласования VJJ, Одновременно происходит срабатывание триггера 6 и на его инверсном выходе появляется сигнал V, поступающий на первый вход элемента И 12 и подготавливающий дальнейшую работу схемы. Появляется сигнал и на входе одновибратора 7, однако его запуска не происходит,так
как запуск одновибратора 7 осуществляется по заднег-гу фронту входного сигнала, т,е, при уменьшении входного сигнала до нулевого уровня, влиянием управляющего воздействия
на выходе регулятора происходит
уменьшение сигнала рассогласования, В момент уменьшения сигнала рассогласования Vj, до величины меньщей, чем зона нечувствительности а нелинейного элемента 13, сигнал Vp на его выходе становится равным О, Прю- исходит отключение усилителя 4 и запуск одновибратора 7, С выхода одно- вибратора 7 сигнал длительностью У поступает на второй вход элемента И 12. На выходе последнего возникает сигнал У, , поступающий на один из входов элемента ИЛИ 10, Благодаря появлению сигнала Vj на выходе элемента
ИЛИ 10 происходит включение усилителя 5 и подача управляющего напряжения на второй вход исполнительного устройства в течение времени ,
При изменении полярности сигнала рассогласования V на противоположный, работа регулятора происходит аналогично, но при изменении полярности сигнала Vp на выходе нелиней3
ного элемента 13. При этом сигнал VP проходит через вентильный элемент 15 и инвертор 16, вызывая последовательное срабатывание усилителей 5 и 4. Инвертор 16 в примере- конструкции обеспечивает идентичность по полярности сигналов на выходах трехпозиционного релейного блока. Таким образом, в процессе регулирования при каждом отключении нелинейного элемента 13 происходит включение на фиксированное время f того выхода регулятора, на котором не было управляющего сигнала при включенном сострянии нелинейного элемента 13.
Сущность изобретения заключает- ся в следующем. При трехпозиционном управлении объектом его управление обеспечивается при подаче управляющих воздействий по двум питающим цепям, включение калодой из которых приводит к изменению знака воздействия на объект управления. При наличии в системе автоматического регулирования чистого запаздывания отключение любой питающей цепи трехпози- ционным релейным блоком происходит с задержкой на время запаздывания относительно момента, при котором происходило бы отключение при отсутствии запаздывания. При этом объект регулирования в течении времени запаздывания находится под излишним воздействием соответствующей питающей цепи. Если же в момент отключения питающей цепи трехпозиционным релейным блоком осуществить включение другой питающей цепи на фиксированное время, то при соответствующем выборе длительности дополнительного включения отрицательное влияние на процесс регулирования запаздывания может быть скомпенсировано полностью или частично, поскольку происходит торможение объекта регулирования, обеспечивающее компенсацию излишнего воздействия первоначального включения .
При отсутствии гистерезиса в характеристике трехпозиционного релейного блока длительность дополнительного противовключения не должна нре- вьщ1ать времени чистого запаздашания, так как в противном случае в системе могут возникнуть автоколебания на границе зоны нечувствительности. Покажем это на примере системы с линей2592084
ной частью, описываемой передаточной
функцией,
W(p)
К
р(1+Тр)
(1)
Дифференциальное уравнение, описывающее линейную часть системы (без учета запаздывания) имеет вид
, l
et
,4 d t
юв.
(2)
Определим длительность дополнительного включения, при котором автоко- лебания на границе зоны нечувствительности невозможны. Пусть начальные условия в системе
Y(0) а; Y(0) О,
(3)
где d - зона нечувствительности ре- лейного элемента.
Условия (3) являются наихудшими с точки зрения возможности возникно- вения автоколебательного режима на границе зоны нечувствительности. Вследствие запаздывания на объект регулирования в течение времени запаз- gJвaния действует, например, уп равляющее воздействие - В (если рассматривать начальные условия дпя анализа возможности автоколебаний на другой границе зоны нечувствительности, то необходимо производить анализ при воздействии +В и начальных
условиях у(0) а у(0) О . Решая уравнение (2 } и принимая i t nojpr- чим-j
,iY, -KB(, ,. () :
40
V, a-kBt k&T i-e
(5)
В момент времени i S с объекта Сни- мается воздействие -В и за счет дополнительного воздействия другой це- пи на время подается воздействие +В, Решая уравнение (2) при. новых начальных условиях, соответствующих (4) и (5 , и принимая if получ1в
(6)
;В-хб(2-е )е ,
f2 a-K6t + }+ic6j-K&T 2-e
/ Л Mlve
.1 (7)
- По окончании дополнительного воз- 55 действия происходит свободное движе-i ние системы, причем
Y(oo + ТЧ
(8)
Для того, чтобы в системе не возникли автоколебания на границе зоны нечувствительности, должно вьшолняться условие
Y (со) i а Положим Л(сх)) а, тогда чТ
, о1 2+тХ2 а-кб(-у),
00
откуда
г.
Таким образом, автоколебания невоа- можны, если
У. . (12)
Еспи трехлозиционный релейный элемент обладает гистерезисом Л а, то для рассматриваембго объекта условием отсутствия автоколебаний на границе зоны нечувствительности является
(()q4-io(. . (53
Следовательно, в предельном случае
(14)
и
(y-г да
Г
хб
ft
( 5)
Изложенное доказьюает наличие положительного эффекта при реализации предложенного устройства.
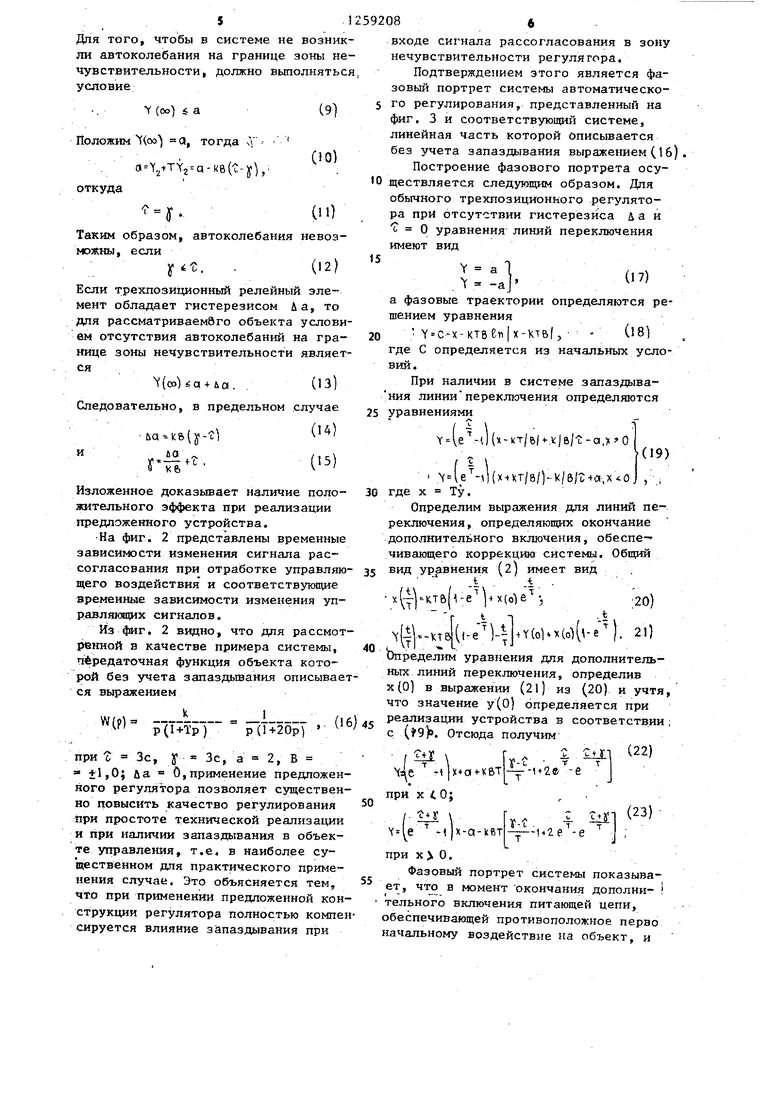
На фиг. 2 представлены временные зависимости изменения сигнала рассогласования при отработке управляю-- щего воздействия и соответствующие временные зависимости изменения управляющих сигналов.
Из фиг. 2 видно, что для рассмотренной в качестве примера системы, передаточная функция объекта которой без учета запаздьшания описывается выражением
k 1
р(Т+тГ) р(Т+20р)
W(p)
(16
при г 3с, у 3с, а 2, В йа. О, применение предложенного регулятора позволяет существенно повысить качество регулирования при простоте технической реализации и при наличии запаздывания в объекте управления, т.е. в наиболее существенном для практического применения случае. Это объясняется тем, что при применении предложенной кон- ст рукции регулятора полностью компенсируется влияние запаздывания при
592086
входе сигнала рассогласования в зону нечувствительности регулятора.
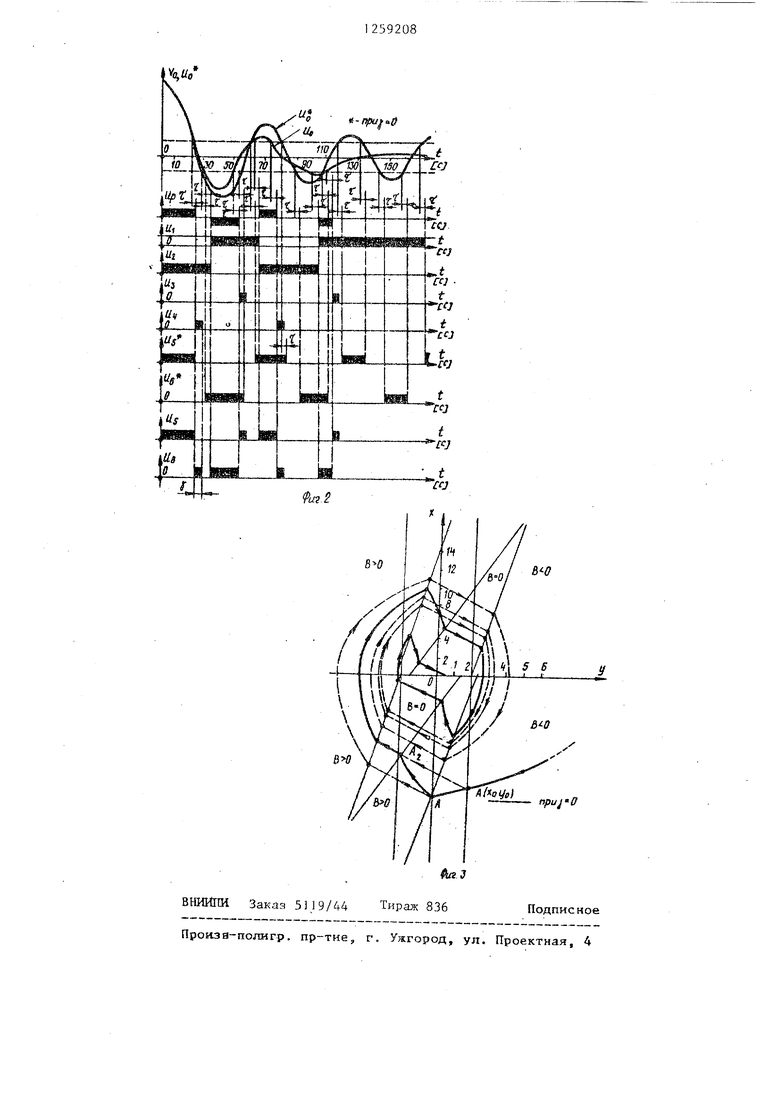
Подтверждением этого является фазовый портрет системы автоматическо- 5 го регулирования, представленный на фиг, 3 и соответствующий системе, линейная часть которой описывается без учета запаздывания выражением (16) .
Построение фазового портрета осу- 10 ществляется следующим образом. Для обычного трехпозиционного регулятора при отсутствии гистерезиса дай Т О уравнения линий переключения имеют вид
Y
Y
-М(17)
а фазовые траектории определяются решением уравнения
Y c-x-KT6 ti K-XT&f, - (18) где С определяется из начальных условий.
При наличии в системе запаздыва- ния линии переключения определяются уравнениями
0
5
0
5
.(е .) (.(e Jl
K-kT/BJ4-.k|B/ L-a, 0
(19)
Це -)(x-tXT/8/ -k/6/ C-tci,X iOj , где X Ту.
Определим выражения для линий переключения, определяющих окончание дополнительного включения, обеспе- чивающего коррекцию системы. Общий вид уравнения (2) имеет вид
:20)
t х(Цт&((о),
(t,J(,.(obv(oHl-e |. 21}
С.
Определим уравнения для дополнительных линий переключения, определив х(0) в выражении (21) из (20) и учтя, что значение у(0) определяется при реализации устройства в соответствии ; с (9). Отсюда получим
/ ±±1
X40;
Г- с т
-1 + 2 -е
(22)
(23)
/ if-Г -
(е V-i)x-a-KfiT-biH.2e -e J
при .
Фазовый портрет системы показывает, что в момент окончания дополни- ) тельного включения питающей цепи, обеспечивающей противоположное перво начальному воздействие на объект, и
при выборе его длительности в соо г- BBtcTBmi с (15) (в приведенном примере при 4а о) изображающие точки А,, Aj, А и А оказываются на тех же траекториях, на которых находились бы при полном отсутствии запаздывания в системе, т,е. ес.ли бы отключение релейного элемента . ходило в моменты Егемени, соответ ствующие точкам В,, Ъ, В и В.Это
показывает полную компенсацию эффекта запаздывания при вхождении сигнала рассогласования в зону нечувствительности релейного элемента. Из фазового портрета фиг.З также видно, что при значительных рассогласованиях, когда время прохождения сигналом рассогласования зоны нечувствительное ти равно или меньше времени дополнительного включения (равенство указан-20 дам первого и второго элементов И,
ных времен характеризует точка С фиг. З), работа системы становится .сходной с работой двухпозиционной системы с обратным гистерезисом релейного элемента.Это обеспечивает по- вышенное бистродействие систем автоматического регулирования при применении предложенной конструкции регулятора, Ф.лрмула изобретения
Трехпозиционный регулятор, содер- жащий задатчик регулируемого парамет
592088
ра, элемент сравнения, трехпозицион- ный релейный блок, а также первый и второй усилители мощности, причем вход элемента сравнения подключен к выходу задатчика, в выход - к входу трехпозиционного релейного блока, отличающийся тем, что, с целью упроще1гая конструкции и расширения области применения, он дополнительно содержит триггер, одновибра- тор, три элемента ИЛИ, а также два элемента И, причем первый выход трехпозиционного релейного блока подключен к первым входам первого и второго элементов ИЛИ и триггера, второй выход - к вторым входам первого и третьего элементов ИЛИ и триггера, выход первого элемента ИЛИ подклю- . чен через одновибратор к первым вхо10
t5
первый и второй выходы триггера под- ключегш соответственно к вторым входам первого и второго элементов И, выходы которых подключены соответственно к второму входу второго элемента ИЛИ и к первому входу третьего элемента ИЛИ, выходы второго и третьего элементов ИЛИ подключены соответственно через первый и второй yci-шители .мопщости к выходам регулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный регулятор для систем с запаздыванием | 1987 |
|
SU1427328A1 |
| Позиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283709A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1278806A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Частотно-импульсный регулятор | 1984 |
|
SU1238028A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Импульсный регулятор | 1982 |
|
SU1101787A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Частотно-импульсный регулятор | 1987 |
|
SU1444709A1 |
Изобретение относится к области автоматики. Цель изобретения - упрощение конструкции и расширение области применения. Регулятор содержит задатчик параметра, элемент сравнения, трехпозициоиный релейный блок и два усилителя мощности. В него введены триггер, одновибратор, три элемента ШШ и два элемента И. Регулятор позволяет осуществлять управление объектом в том случае, когда запаздывание входит в структуру объекта управления. 3 ил. NP СЛ СО tsD
I
.Sm.p.
I
ia-2
LCJ
fo
i
fCJ
-.
npuj O
ВНИИГМ Заказ 51j9/44 Тираж 836 Подписное Произя-полигр. пр-тне, г. Ужгород, ул. Проектная, 4
| Турецкий X | |||
| Анализ и синтез систем управления с запаздашанием | |||
| М.: Машиностроение, 1974, с.303, рис.IX.10 | |||
| Королев Н.А | |||
| О компенсации запаздывания в релейной системе | |||
| Автоматика и телемеханика | |||
| Т.ХХП | |||
| Судно | 1925 |
|
SU1961A1 |
