00 О СЛ
Фиг.1
Ю
Изобретение относится к области производства бетонных смесей и является усовершенствованием регулятора подвижности бетонной смеси по авт. св. № 1333586.
Цель изобретения - повышение надежности работы регулятора.
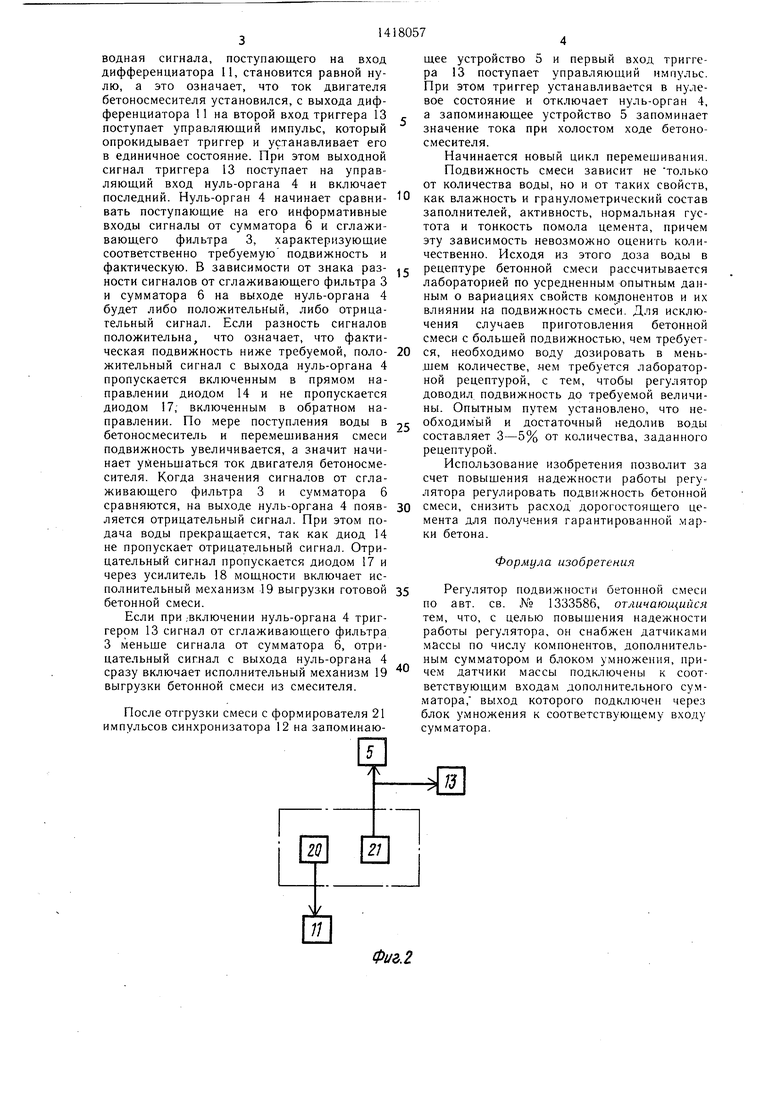
На фиг. 1 представлена блок-схема регулятора подвижности бетонной смеси; на фиг. 2 - блок-схема синхронизатора; на фиг. 3 - графики изменения тока двигателя бетоносмесителя в течение одного цикла перемешивания для разных значений массы смеси.
Регулятор подвижности бетонной смеси (фиг. 1) содержит датчик 1 мошности, включенный в цепь одной из фаз питания двигателя 2, выход датчика 1 мощности подключен к входу сглаживаюшего фильтра 3. Выход сглаживаюш,его фильтра 3 соединен с первым информативным входом
10
15
фильтра 3 поступает на первый вход нуль- органа 4, а также на информативные входы запоминаюшего устройства 5 и дифференциатора 11. По окончании выгрузки бетонной смеси из бетоносмесителя в предыдущем замесе с формирователя 21 импульсов синхронизатора 12 на управляющий вход запоминаюшего устройства 5 подается управляющий сигнал. Запоминающее устройство запоминает при этом значение сигнала с выхода сглаживающего фильтра 3, характеризующего ток двигателя при холостом ходе бетоносмесителя. Запомненное значение сигнала подается на первый вход сумматора 6, на второй вход которого поступает сигнал от задатчика 7 подвижности. Сигнал задатчика 7 подвижности характеризует разность между величиной тока двигателя бетоносмесителя в момент достижения бетонной смесью требуемой подвижности и величиной тока холостого хода
нуль-органа 4, а также с информативным 20 бетоносмесителя. Эта разность для данной
25
30
входом запоминающего устройства 5. Выход запоминающего устройства 5 соединен с первым входом сумматора 6, второй вход сумматора б соед11нен с выходом задатчика 7 подвижности, а третий вход соединен с выходом блока 8 умножения. Вход блока 8 умножения соединен с выходом сумматора 9, входы которого соединены с датчиками 10| -10„ веса по количеству компонентов.
Выход сгла живающего фильтра 3 соединен также с информативным входом дифференциатора 11, а управляющий вход дифференциатора 11 соединен с первым выходом синхронизатора 12. Второй выхол .синхронизатора 12 соединен с управляющим входом запоминающего устройства 5 и с первым входом триггера 13. Второй вход триг- 5 гера 13 соединен с выходом дифференциатора 11, а выход триггера 13 подключен к управляющему входу нуль-органа 4. Выход нуль-органа 4 соединен с диодом 14, который соединен с последовательно включенными усилителем 15 мощности и исполнительным механизмом 16 подачи воды, а также с диодом 17, который соединен с последовательно включенными усилителем 18 мощности и исполнительным механизмом 19 выгрузки бетонной смеси.
Синхронизатор 12 (фиг. 2) состоит из двух идентичных формирователей 20 и 21 управляющих импульсов. Выход первого формирователя 20 соединен с управляющим входом дифференциатора 11, а выход второго формирователя 21 соединен с управляющим входом запоминающего устройства Бис первым входом триггера 13.
Регулятор подвижности бетонной смеси работает следующим образом.
В одну из фаз питания двигателя 2 бетоносмесителя включен датчик 1 мощности, сигнал с выхода которого поступает на вход сглаживающего фильтра 3. Полезный сигнал с выхода сглаживающего
величины подвижности при-неизменнои массе материала в смесителе является величиной постоянной. После окончания дозирования с датчиков lOi -10„ веса (п - количество компонентов, из которых приготовляется смесь) на входы сумматора 9 поступают сигналы, характеризующие фактически отдозированные количества материалов. Сигнал с выхода сумматора 9, характеризующий массу смеси в смесителе, подается через блок 8 умножения, где он умножается на некоторый коэффициент пропорциональности К, характеризующий влияние массы смеси на величину тока двигателя бетоносмесителя, на третий вход сумматора 6. Выбор коэффициента пропорциональности К (как и градуировка задатчика подвижности) производится известными методами на основе экспериментальных данных. В сумматоре 6 сигналы от запоминающего устройства 5, задатчика 7 подвижности и блока 8 умножения складываются и результирующий сигнал подается на второй вход нуль-органа 4.
Управляющий импульс с формирователя 21 синхронизатора 12, включающий запоминающее устройство 5, одновременно поступает и на первый вход триггера 13. При этом триггер устанавливается в нулевое состояние и отключает нуль-орган 4. После окончания дозирования компонентов и их загрузки в бетоносмеситель управ- импульс с формирователя 20 син5Q хронизатора 12 включает дифференциатор 11, на информационный вход которого поступает сигнал с выхода сглаживающего фильтра 3.,
По мере перемещивания материалов и перехода смеси в подвижное состояние ток
55 двигателя бетоносмесителя падает и, когда смесь становится достаточно однородной по составу, устанавливается на некотором определенном уровне. В момент, когда произ40
45
фильтра 3 поступает на первый вход нуль- органа 4, а также на информативные входы запоминаюшего устройства 5 и дифференциатора 11. По окончании выгрузки бетонной смеси из бетоносмесителя в предыдущем замесе с формирователя 21 импульсов синхронизатора 12 на управляющий вход запоминаюшего устройства 5 подается управляющий сигнал. Запоминающее устройство запоминает при этом значение сигнала с выхода сглаживающего фильтра 3, характеризующего ток двигателя при холостом ходе бетоносмесителя. Запомненное значение сигнала подается на первый вход сумматора 6, на второй вход которого поступает сигнал от задатчика 7 подвижности. Сигнал задатчика 7 подвижности характеризует разность между величиной тока двигателя бетоносмесителя в момент достижения бетонной смесью требуемой подвижности и величиной тока холостого хода
5
0
5
величины подвижности при-неизменнои массе материала в смесителе является величиной постоянной. После окончания дозирования с датчиков lOi -10„ веса (п - количество компонентов, из которых приготовляется смесь) на входы сумматора 9 поступают сигналы, характеризующие фактически отдозированные количества материалов. Сигнал с выхода сумматора 9, характеризующий массу смеси в смесителе, подается через блок 8 умножения, где он умножается на некоторый коэффициент пропорциональности К, характеризующий влияние массы смеси на величину тока двигателя бетоносмесителя, на третий вход сумматора 6. Выбор коэффициента пропорциональности К (как и градуировка задатчика подвижности) производится известными методами на основе экспериментальных данных. В сумматоре 6 сигналы от запоминающего устройства 5, задатчика 7 подвижности и блока 8 умножения складываются и результирующий сигнал подается на второй вход нуль-органа 4.
Управляющий импульс с формирователя 21 синхронизатора 12, включающий запоминающее устройство 5, одновременно поступает и на первый вход триггера 13. При этом триггер устанавливается в нулевое состояние и отключает нуль-орган 4. После окончания дозирования компонентов и их загрузки в бетоносмеситель управ- импульс с формирователя 20 синQ хронизатора 12 включает дифференциатор 11, на информационный вход которого поступает сигнал с выхода сглаживающего фильтра 3.,
По мере перемещивания материалов и перехода смеси в подвижное состояние ток
5 двигателя бетоносмесителя падает и, когда смесь становится достаточно однородной по составу, устанавливается на некотором определенном уровне. В момент, когда произ0
5
щее устройство 5 и первый вход триггера 13 поступает управляющий нглпульс. При этом триггер устанавливается в нулевое состояние и отключает нуль-орган 4, а запоминающее устройство 5 запоминает значение тока при холостом ходе бетоносмесителя.
Начинается новый цикл перемещивания.
Подвижность смеси зависит не только от количества воды, но и от таких свойств,
водная сигнала, поступающего на вход дифференциатора 11, становится равной нулю, а это означает, что ток двигателя бетоносмесителя установился, с выхода дифференциатора 11 на второй вход триггера 13 поступает управляющий импульс, который опрокидывает триггер и устанавливает его в единичное состояние. При этом выходной сигнал триггера 13 поступает на управляющий вход нуль-органа 4 и включает
последний. Нуль-орган 4 начинает сравни- Ю как влажность и гранулометрический состав вать поступающие на его информативныезаполнителей, активность, нормальная гусвходы сигналы от сумматора 6 и сглажи-тота и тонкость помола цемента, причем
вающего фильтра 3, характеризующиеэту зависимость невозможно оценить колисоответственно требуемую подвижность ичественно. Исходя из этого доза воды в
фактическую. В зависимости от знака раз- рецептуре бетонной смеси рассчитывается ности сигналов от сглаживающего фильтра 3лабораторией по усредненным опытным дани сумматора 6 на выходе нуль-органа 4ным о вариациях свойств компонентов и их
будет либо положительный, либо отрица-влиянии на подвижность смеси. Для исклютельный сигнал. Если разность сигналовчения случаев приготовления бетонной
положительна, что означает, что факти-смеси с больщей подвижностью, чем требуетческая подвижность ниже требуемой, поло- 20 ся, необходимо воду дозировать в мень- жительный сигнал с выхода нуль-органа 4.тем количестве, .чем требуется лабораторпропускается включенным в прямом на-ной рецептурой, с тем, чтобы регулятор
правлении диодом 14 и не пропускаетсядоводил подвижность до требуемой величидиодом 17, включенным в обратном на-ны. Опытным путем установлено, что неправлении. По мере поступления воды в обходимый и достаточный недолив воды бетоносмеситель и перемещивания смеси составляет 3-5% от количества, заданного подвижность увеличивается, а значит начи-рецептурой.
нает уменьщаться ток двигателя бетоносме-Использование изобретения позволит за
сителя. Когда значения сигналов от сгла-счет повыщения надежности работы регуживающего фильтра 3 и сумматора 6лятора регулировать подвижность бетонной
сравняются, на выходе нуль-органа 4 появ- ЗО смеси, снизить расход дорогостоящего це- ляется отрицательный сигнал. При этом по-мента для получения гарантированной мардача воды прекращается, так как диод 14ки бетона,
не пропускает отрицательный сигнал. Отрицательный сигнал пропускается диодом 17 и через усилитель 18 мощности включает исполнительный механизм 19 выгрузки готовой 35 бетонной смеси.
Если при .-включении нуль-органа 4 триггером 13 сигнал от сглаживающего фильтра 3 меньше сигнала от сумматора 6, отриФормула изобретения
цательный сигнал с выхода нуль-органа 4 сразу включает исполнительный механизм 19 выгрузки бетонной смеси из смесителя.
После отгрузки смеси с формирователя 21 импульсов синхронизатора 12 на запоминаю40
Регулятор подвижности бетонной смеси по авт. св. 1333586, отличающийся тем, что, с целью повьииения надежности работы регулятора, он снабжен датчиками массы по числу компонентов, дополнительным сумматором и блоком умножения, причем датчики массы подключены к соответствующим входам дополнительного сумматора, выход которого подключен через блок умножения к соответствующему входу сумматора.
щее устройство 5 и первый вход триггера 13 поступает управляющий нглпульс. При этом триггер устанавливается в нулевое состояние и отключает нуль-орган 4, а запоминающее устройство 5 запоминает значение тока при холостом ходе бетоносмесителя.
Начинается новый цикл перемещивания.
Подвижность смеси зависит не только от количества воды, но и от таких свойств,
как влажность и гранулометрический состав заполнителей, активность, нормальная гусФормула изобретения
Регулятор подвижности бетонной смеси по авт. св. 1333586, отличающийся тем, что, с целью повьииения надежности работы регулятора, он снабжен датчиками массы по числу компонентов, дополнительным сумматором и блоком умножения, причем датчики массы подключены к соответствующим входам дополнительного сумматора, выход которого подключен через блок умножения к соответствующему входу сумматора.
М KS.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор подвижности бетонной смеси | 1986 |
|
SU1333586A1 |
| Устройство для измерения мощности и герметичности цилиндров двигателля внутреннего сгорания | 1987 |
|
SU1493897A1 |
| Автоматическое устройство для измерения подвижности бетонной смеси в процессе ее приготовления | 1982 |
|
SU1114559A1 |
| Регулятор подвижности бетонной смеси | 1981 |
|
SU980997A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ПОЧВЫ | 2015 |
|
RU2578444C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МАТЕРИАЛОВ | 1996 |
|
RU2108568C1 |
| Устройство для управления процессом изготовления бетонных и железобетонных изделий | 1990 |
|
SU1728029A2 |
| Способ определения угла опережения впрыска топлива двигателя внутреннего сгорания и устройство для его осуществления | 1989 |
|
SU1740759A1 |
| Система управления измельчительным агрегатом | 1982 |
|
SU1101302A1 |
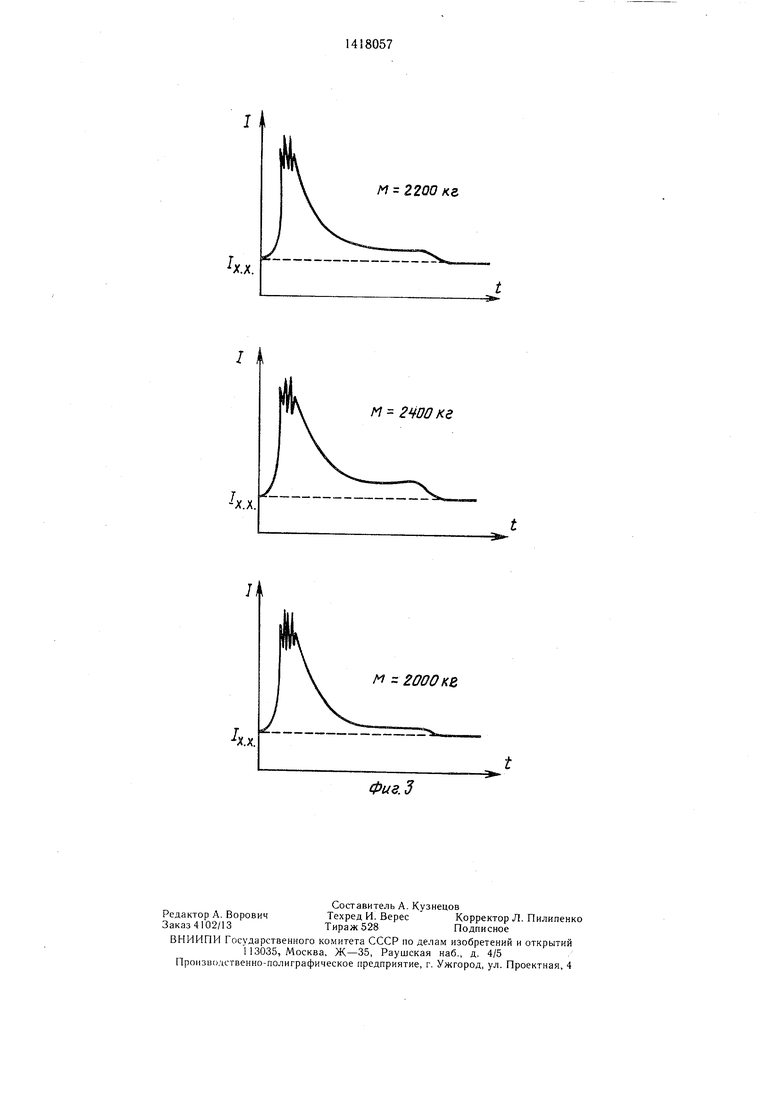
Изобретение относится к производству бетонных смесей. Позволяет повысить надежность работы регулятора. Содержит датчик 1 мощности, включенный в цепь одной из фаз питания двигателя 2, сглаживающий фильтр 3, нуль-орган 4, запоминающее устройство 5, сумматор 6, за- датчик 7 подвижности бетонной смеси, блок 8 умножения, сумматор 9, датчики lOi-10п веса по количеству компонентов, дифференциатор 11, синхронизатор 12, триггер 13, диод 14, усилитель 15 мощности, исполнительный механизм 16 подачи воды, диод 17, усилитель 18 мощности и исполнительный механизм 19 выгрузки бетонной смеси. 3 ил.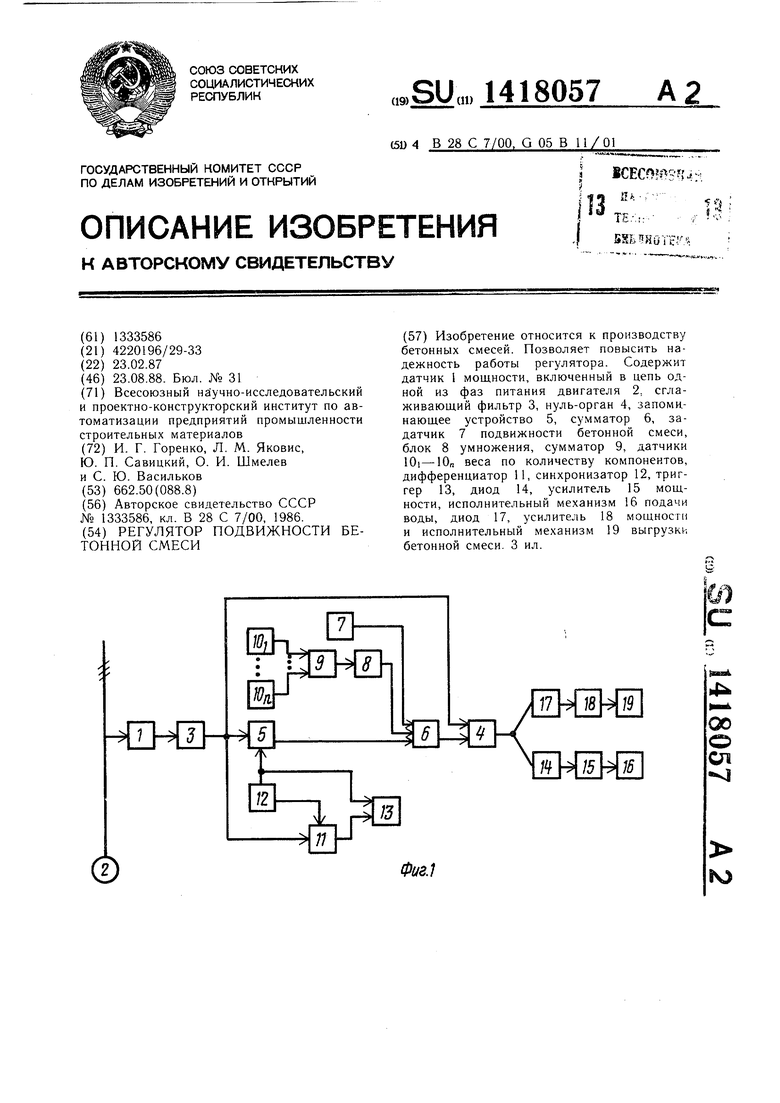
-Х.)(.
х.х
f 2400KS
t -2000К&
| Регулятор подвижности бетонной смеси | 1986 |
|
SU1333586A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
