Предлагаемое техническое решение относится к области управляемого электропривода, в том числе с ограниченным углом поворота (электромеханические преобразователи) с нагружением, содержащим компоненту типа «сухого» трения. В [1] указано, что в общем случае сила трения зависит от относительной скорости движения тел. При этом с увеличением относительной скорости движения тел сила трения сначала уменьшается и при дальнейшем увеличении скорости растет. В [2, рис. 1.33] и [3, фиг. 3] приведена форма соответствующей кривой (статическая фрикционная характеристика). Кроме того, составляющая «сухого» трения характеризуется тем, что движение нагрузки из состояния покоя начинается только после того, как движущий момент в направлении предполагаемого движения превысит момент трогания (момент трения покоя). Поскольку развиваемый электродвигателем момент пропорционален току в обмотке, а нарастание тока в обмотке носит инерционный характер из-за ее индуктивности, вследствие ограниченности напряжения питания будет иметь место задержка по времени начала движения даже при подаче питания на двигатель скачком. Предлагаемое техническое решение направлено на уменьшение влияния этого эффекта на точность и быстродействие электропривода и может быть использовано во всех тех областях техники, где используется управляемый электропривод, преимущественно в тех случаях, когда трение покоя нагрузки значительно превышает трение движения. В качестве исполнительных устройств электропривода могут применяться электромеханические преобразователи, электродвигатели постоянного тока, в том числе бесконтактные, моментные двигатели, синхронные электродвигатели с мостовыми схемами управления, асинхронные двигатели с раздельным управлением амплитудой и частотой питающего напряжения (тока) или чисто амплитудным управлением.
Известен [4] способ динамической компенсации трения, который использует дополнительное звено, выполненное по структуре линейной части объекта - модель двигателя без трения. Сигнал с модели, соответствующий угловой скорости, если б трение отсутствовало, сравнивается с сигналом тахогенератора (фактической угловой скоростью). Разностный сигнал усиливается и со знаком, зависящим от скорости двигателя, суммируется с сигналом основного усилителя. Недостатком этого способа является то, что разность истинной и модельной скоростей будет пропорциональна моменту трения только в установившемся режиме движения с постоянной скоростью. Поэтому данный способ не позволяет уменьшить время страгивания при начале движения из состояния покоя или при изменении направления движения. Более того, из-за плавного, а не релейного изменения сигнала при смене направления движения время страгивания может увеличиться.
Здесь и далее следует отметить, что при описании способов и устройств считается очевидной необходимость сопряжения маломощной управляющей части электропривода и мощной исполнительной части, а также измерительных датчиков и управляющей части. При этом под управляющей частью понимается совокупность аналоговых и/или цифровых линейных и нелинейных корректирующих устройств, в том числе при многоконтурной реализации, и устройств для ввода и (или) учета перекрестных, компенсирующих и обратных связей. Элементы, обеспечивающие сопряжение, аппаратно могут входить как в управляющую или исполнительную часть, так и в состав измерительных датчиков.
В [5] предложено добавлять в сигнал управления двигателем периодическую последовательность прямоугольных импульсов от генератора с уровнем, превышающим напряжение трогания, определенное по статической характеристике электродвигателя. Прямоугольные импульсы приводят двигатель в колебательное движение достаточно большой частоты, что способствует линеаризации присущей ему нелинейности «сухого» трения. Недостатком этого способа является то, что увеличиваются токопотребление и нагрев двигателя, а при недостаточно высокой частоте может увеличиться и ошибка. При формировании сигнала по данному методу также не учитывается индуктивность обмотки. Поэтому для частот f выше 1/2πТдв (Тдв - электрическая постоянная обмотки) и ограниченном напряжении питания могут иметь место случаи, когда никаким коэффициентом невозможно достичь превышения развиваемого двигателем момента Mдв=Cм⋅Iдв (Cм -коэффициент момента двигателя, Iдв - ток в обмотке) величины момента трогания. Это следует из того, что максимальная амплитуда тока может быть оценена (без учета коэффициента гармонической линеаризации и противоЭДС) величиной:

где Uпит - напряжение питания двигателя,
ω=2πf - круговая частота сигнала, поступающего на вход двигателя.
То есть по мере роста частоты ток падает, стремясь в пределе к нулю.
В [6], параграф 9.5, и [7] описаны технические решения, когда сигнал, соответствующий по форме трению (статической фрикционной характеристике), но с тем же знаком, что и скорость движения, подается на вход двигателя или на вход контура тока, а также дается предложение вместо сигнала по скорости нагрузки на формирователь сигнала, имитирующего трение (формирователь компенсации трения), подавать не скорость нагрузки, а скорость с задатчика, поступающую на неинвертирующий вход скоростного контура привода. В обоих источниках предполагается, что трение имеет постоянный уровень и изменяется только при смене знака скорости (сигнатурная форма фрикционной характеристики). При этом также пренебрегается влиянием инерционности нарастания тока, а следовательно, и момента, развиваемого двигателем. То есть проблема сокращения времени страгивания двигателя после остановки при изменении направления движения не решается. Более того, в тех случаях, когда сигнал компенсации трения реализовывается в функции от текущей скорости привода, его знак изменится только после возобновления движения, то есть в процессе преодоления трения покоя ранее сформированный сигнал компенсации будет мешать нарастанию тока в обмотке двигателя.
Наиболее близкой к первому варианту предлагаемого способа является вибрационная компенсация «сухого» трения в электроприводе [4], при которой в ограниченном близком к нулю диапазоне скоростей нагрузки к основному управляющему сигналу, который идет на двигатель для формирования момента управления (траекторная компонента), формируется и добавляется постоянный по амплитуде сигнал из дополнительной связи (фрикционная компонента). Расчетно амплитуда этого сигнала берется такой, чтобы превышать напряжение трогания, то есть напряжение, при котором двигатель разовьет момент, равный моменту трения покоя. Измеряют текущую скорость движения электропривода. Определяют ее знак и используют его для присвоения знака фрикционной компоненте сигнала управления. При выходе текущей скорости движения за назначенный диапазон скоростей сигнал снимается. В основе этого способа лежит то, что для установившегося движения вала двигателя ток в обмотке пропорционален моменту нагружения, то есть сумме динамической составляющей пропорциональной ускорению, задаваемой основным управляющим сигналом, и трения. В частном случае «сухого» трения постоянной величины в соответствии с принципом суперпозиции постоянное по амплитуде напряжение сигнала из дополнительной связи вызывает компоненту тока, приводящую к возникновению в электродвигателе момента силы, уравновешивающего после окончания переходного процесса в обмотке момент силы трения. При этом в установившемся режиме постоянному напряжению основного управляющего сигнала будет соответствовать движение с такой же постоянной скоростью, какая была бы при отсутствии трения.
Недостатками такого способа являются, во-первых, то, что снятие дополнительного сигнала приводит к уменьшению скорости движения, как следствие, во-вторых, возникают переходные процессы при сбросе добавки с возможностью возникновения автоколебаний, в-третьих, после остановки сигнал компенсации трения препятствует нарастанию тока в обмотке, предназначенного для развития момента, преодолевающего трение покоя, и, в-четвертых, имеет место неопределенность - какого знака поправку вводить с момента времени остановки при реверсе до момента времени, пока движение не возобновилось.
Техническим результатом предлагаемого решения является повышение быстродействия и точности отработки электроприводом входных сигналов, приводящих к изменению знака скорости, при наличии в нагружении компоненты типа «сухое» трение, в том числе, когда трение покоя превышает трение движения на начальном участке разгона.
Для достижения этого результата способ управления электроприводом, заключающийся в том, что формируют компоненту сигнала управления, исходя из требуемого закона движения нагрузки, кинематически связанной с подвижным элементом двигателя (траекторную компоненту), измеряют скорость движения нагрузки, определяют знак скорости, формируют фрикционную компоненту, и прибавляют ее к траекторной компоненте сигнала управления, а полученную сумму используют для управления двигателем, изменяют следующим образом:
- определяются момент ожидаемой смены знака скорости нагрузки (обнуления скорости) и ожидаемый знак скорости после остановки;
- фрикционная компонента формируется в зависимости от ожидаемой скорости нагрузки после остановки (ее знака);
- формируется дополнительная компонента сигнала управления в форме кратковременного импульса;
- передние фронты сигналов сигнатурной и импульсной компонент запускают с опережением к моментам смены знака скорости нагрузки.
Получение положительного эффекта при реализации этого способа основывается на следующем. В случае присутствия в нагружении привода компоненты типа «сухого» трения при трогании и реверсе движение не может начаться, пока развиваемый двигателем момент не превысит момент силы трения покоя (достигнет величины момента трогания). Даже при подаче на вход двигателя напряжения равного напряжению питания (с момента времени, когда при торможении будет достигнута нулевая скорость, противоЭДС равна нулю) время нарастания момента, развиваемого двигателем, до величины момента трогания не может быть менее (Тдв⋅Мтрог)/Мп, где Мтрог - момент трогания, приведенный к валу двигателя, а Мп - пусковой момент двигателя при поданном напряжении питания. (На практике невозможно неограниченно увеличить сигнал на входе двигателя, используя, например, в цепи компенсации форсирующее звено с постоянной равной Тдв. Сигнал на его выходе не сможет превысить напряжение питания, верхний предел которого ограничен техническими характеристиками двигателя). Если же ограничиться подачей ступенчатого напряжения с уровнем, соответствующим моменту трогания (напряжение трогания), то время нарастания момента двигателя до этого уровня уже будет не менее 3⋅Тдв, что намного больше. В прототипе подача компенсирующего сигнала может начаться еще позже - после начала движения, так как после остановки знак скорости не может быть определен из-за отсутствия движения. В течение всего этого времени будет накапливаться отклонение положения нагрузки от требуемого ее положения, особенно в случае отработки приводом динамичного входного сигнала (траекторной компоненты). То есть выигрыш по точности имеет место уже за счет того, что момент подачи сигнатурной компоненты с измененным знаком приближается к моменту остановки, а подача импульсной компоненты позволяет получить дополнительный эффект. Если же трение покоя существенно выше трения движения, на которое настроена фрикционная компонента, то влияние импульсной компоненты на уменьшение ошибки увеличивается.
При реверсивном движении знак скорости после остановки будет противоположен знаку скорости до остановки, а при длительной остановке, в том числе при первоначальном трогании, соответствовать знаку траекторной компоненты, сформированной после остановки. Поэтому важным элементом предлагаемого способа является определение ожидаемого или фактически наступившего момента обнуления скорости нагрузки. Можно, например, предложить для этого следующие совокупности операций.
Вариант 1. Измерить скорость нагрузки, измерить или вычислить ускорение (производную от скорости), поделить скорость на ускорение и, если они имеют противоположные знаки, сравнить модуль полученной величины с заданным порогом, если порог выше - запустить таймер на время, равное модулю ранее полученного кратного скорости и ускорения (или меньшее по величине). Конец работы таймера будет определять ожидаемый момент смены знака скорости нагрузки, при необходимости с упреждением. Таймер может быть сброшен, если до обнуления скорости ускорение изменило знак на совпадающий со знаком скорости или обнулилось, или при необходимости откорректирован в случае изменения получаемого кратного.
Вариант 2. Измерить скорость нагрузки, провести ее сравнение с нулем, при равенстве нулю выдать сигнал о достижении скоростью нулевого значения, то есть о возможности изменения знака скорости при продолжении движения.
Таким образом, момент предстоящей смены знака скорости нагрузки или фактического ее обнуления может быть определен, и если в этот момент подать на вход двигателя импульсный и сигнатурный сигналы, знак которых соответствует ожидаемому направлению движения, то ток в обмотке двигателя начнет изменяться таким образом, чтобы обеспечить страгивание в направлении дальнейшего движения. Следует отметить, что для уменьшения вероятности возникновения автоколебаний возможно было бы целесообразно учитывать тенденцию изменения сигнала с выхода управляющей части, но в большинстве случаев из-за малости постоянной времени обмотки частота колебаний будет настолько высокой, что (см. (1)) колебания тока не вызовут заметного движения нагрузки.
В случае импульса прямоугольной формы длительностью tи и амплитудой импульса, меньшей напряжения питания в kи раз, момент от импульсной компоненты сигнала управления будет нарастать (по модулю) с подачи импульса в течение времени tи, а затем спадать от уровня приблизительно равного ((Мп⋅kи⋅tи)/Тдв-Мтрог) в течение 3⋅Тдв. К моменту спада до нуля составляющей тока, вызванной импульсом, рост тока от фрикционной компоненты (в частном случае сигнатурной формы) должен практически закончиться, но нарастание тока даже при подаче ступенчатого входного воздействия длится такое же время, что и спад тока импульсной. Отсюда следует:
- длительность импульса должна быть существенно меньше времени переходного процесса в обмотке (иначе не останется времени на спад);
- момент ((Мп⋅kи⋅tи)/Тдв-Мтрог), достигаемый к концу нарастания тока, вызванного импульсной компонентой сигнала управления, должен превышать момент компенсации, соответствующий фрикционной компоненте в установившемся режиме (для того, чтобы обеспечить страгивание и не создавать предпосылок для остановки привода в процессе спада тока, вызванного управляющим импульсом). Тогда:

где Мсгн - момент компенсации, соответствующий сигнатурной составляющей в установившемся режиме.
Кроме того, для конкретной реализации также может оказаться целесообразным рассинхронизировать моменты подачи фрикционной и импульсной компонент, задержав фрикционную относительно импульсной, или затянуть задний фронт падения составляющей тока в обмотке, инициированной импульсной компонентой, используя импульс с пологим задним фронтом. Последнее целесообразно, когда инерция нагрузки велика (скорость под действием момента набирается медленно), а ниспадающий (по модулю) участок кривой трения в функции от скорости нагрузки имеет малую крутизну.
Как уже отмечалось, даже если подать на обмотку напряжение нужной полярности в момент остановки движения нагрузки, движение нагрузки в противоположном направлении начнется с задержкой на время нарастания тока в обмотке до уровня, соответствующего моменту трогания. Поэтому можно получить дополнительный эффект за счет опережающей подачи компенсирующих трение сигналов па вход двигателя. Упреждение не может быть произвольно большим, так как при этом вырастет ошибка отработки требуемого закона движения на участке торможения нагрузки (за счет увеличения ускорения торможения по сравнению с необходимым для движения нагрузки по заданному закону). В идеале следует по мере возможности добиваться минимизации (по модулю) ошибок по выбранному критерию (например, максимальных, средних, среднеквадратичных, в том числе на ограниченных временных интервалах) при страгивании и торможении. Теоретическое определение требуемого упреждения требует знания большого объема информации (требуемый закон движения нагрузки, форма зависимости трения от скорости, в том числе значение трения трогания, параметры электродвигателя), многие элементы которой могут меняться от привода к приводу. Однако практически каждый конкретный привод может быть настроен на типовой сигнал (сигналы) при изготовлении, а в случае дрейфа параметров - и в эксплуатации. В частности, время до ожидаемого момента смены знака скорости, определяемое по «Варианту 1», может быть уменьшено на необходимую величину. Можно также применить способ, основанный на том, что приращение скорости на коротких одинаковых последовательных интервалах примерно одинаково. Тогда:

где V - измеренная скорость;
t - момент времени, соответствующий измерению;
Δt - интервал задержки (упреждения).
При неодинаковых интервалах задержки и упреждения выражение (2) можно преобразовать к виду:

Соответственно, сравнивая V(t+μΔt) с нулем, можно выработать признак начала подачи фрикционной и импульсной компонент управляющего сигнала. В случае использования только фрикционной компоненты с постоянной амплитудой для компенсации трения может использоваться сигнатура сигнала V(t+μΔt) после соответствующего масштабирования (без операции определения момента его обнуления).
То есть описанный способ характеризуется следующими признаками. Во-первых, измеряется скорость движения нагрузки, кинематически связанной с подвижной частью электродвигателя, определяется момент времени ожидаемой остановки перед сменой знака скорости, в расчетный момент остановки перед сменой знака скорости формируется сигнал фрикционной компенсации, знак которого соответствует знаку ожидаемой скорости нагрузки после остановки, а величина - компенсируемому трению нагрузки, полученный сигнал суммируется с сигналом, задающим требуемый закон движения нагрузки, и сумма используется для управления электродвигателем.
Во-вторых, сигнал фрикционной компенсации может подаваться на суммирование с опережением к расчетному моменту смены знака скорости нагрузки.
В-третьих, в дополнение к сигналу фрикционной компенсации может формироваться кратковременный импульс (компонента конечной длительности) того же знака, обеспечивающий за время его подачи нарастание момента двигателя выше уровня момента трогания.
В-четвертых, импульсная компонента может подаваться на суммирование с опережением по отношению к фрикционной.
В-пятых, форма импульса может создаваться такой, что нарастание тока в обмотке осуществляется быстро, а спад тока - медленнее, чем переходный процесс при ступенчатой подаче напряжения на обмотку.
Из [8] известно, что в системах автоматического управления, к классу которых относится электропривод, точки измерения и ввода сигналов можно переносить по указанным, в частности, там же правилам. То есть компенсирующие трение сигналы могут быть перемещены со входа двигателя, например, на вход контура скорости или напряжения, а вместо измерения скорости можно было бы измерять перемещение или ускорение нагрузки, напряжение и ток в обмотке. Наибольший интерес представляет вариант, когда в электроприводе имеется контур, замкнутый по току. Это обусловлено тем, что, как уже указывалось выше, развиваемый двигателем момент пропорционален протекающему в обмотке току, а наличие замкнутого контура позволяет точно поддерживать требуемое его значение (по крайней мере, на начальном участке после трогания, пока противоЭДС мала). Поэтому с точностью до коэффициента в диапазоне частот ниже частоты среза токового контура сигнал на его входе можно считать задающим развиваемый двигателем момент. Следовательно, и ранее рассмотренные фрикционный и импульсный сигналы с уровнями, соответствующими входу двигателя, могут быть перенесены на вход токового контура электропривода с изменением только масштаба.
Наиболее близким к этому варианту способа является [6J, включающий в себя следующую совокупность действий:
- формируют сигнал требуемого изменения тока двигателя, обеспечивающий необходимый закон перемещения нагрузки, кинематически связанной с подвижным элементом двигателя (траекторную компоненту сигнала управления);
- измеряют ток двигателя (получают сигнал обратной связи по току) и вычитают его из сигнала, задающего траекторную компоненту, то есть сравнивают их значения;
- измеряют текущую скорость двигателя и определяют ее знак;
- домножают знак текущей скорости на уровень тока, соответствующий величине «сухого» трения (формируют фрикционную компоненту сигнала управления);
- добавляют фрикционную компоненту сигнала управления к разности траекторией компоненты и сигнала обратной связи по току;
- полученную сумму усиливают и преобразовывают для обеспечения добротности при сохранении устойчивости и качества регулирования в контуре управления по току, а полученный сигнал подают на вход двигателя.
Недостатком такого способа является наличие ошибки из-за неучета инерционности нарастания тока вследствие индуктивности обмотки двигателя, а также снижение быстродействия, в том числе и из-за того, что на временном отрезке преодоления трения покоя после остановки привода ранее сформированный сигнал компенсации трения препятствует нарастанию тока.
Техническим результатом предлагаемого решения является повышение быстродействия и точности отработки электроприводом входных сигналов, требующих изменения знака скорости нагрузки, при наличии в нагружении компоненты типа «сухое» трение, в том числе, когда трение покоя превышает трение движения на начальном участке разгона.
Для достижения этого результата способ управления электроприводом, заключающийся в том, что формируют сигнал требуемого изменения тока двигателя, обеспечивающий необходимый закон перемещения нагрузки, кинематически связанной с подвижным элементом двигателя, измеряют ток двигателя и формируют сигнал обратной связи по току, формируют компенсирующий сигнал по трению, алгебраически суммируют сигналы управления перемещением, обратной связи и компенсации трения и эту сумму усиливают и преобразовывают для обеспечения добротности при сохранении устойчивости и качества регулирования в контуре управления по току, а полученный сигнал подают на вход двигателя, а также измеряют скорость нагрузки, изменяют таким образом, что определяют ожидаемый момент времени остановки привода при отработке им знакопеременного по скорости закона движения, прогнозируют значение скорости (ее знака) после возобновления движения, используют для формирования сигнала компенсации трения скорость (ее знак), ожидаемую после возобновления движения, и осуществляют формирование сигнала компенсации трения, соответствующего ожидаемому после остановки направлению движения, не позднее ожидаемого момента времени остановки привода.
Предлагаются также дополнительные усовершенствования предлагаемого способа: введение в сигнал управления импульсной компоненты со знаком, соответствующим знаку скорости привода после реверса, и амплитудой, позволяющей достичь значение тока, превышающее требуемое для преодоления момента трогания, при этом начало подачи импульсной компоненты должно, по крайней мере, не отставать от момента изменения фрикционной компоненты сигнала управления, а ее задний фронт может быть растянут для предотвращения остановки после трогания и снижения ошибки отработки требуемой траектории движения с изменяющимся знаком скорости.
Хотя каждая из операций в предлагаемом способе управления электроприводом является известной для специалиста в области управляемых приводов, совокупность их, по мнению заявителя, является новой, и не применялась ранее для получения указанной совокупности положительных эффектов.
Работа привода с токовым контуром в предложенных вариантах осуществляется, в основном, также, как это было описано для привода с подачей компенсирующего трение сигнала на вход двигателя. Компонента траекторного управления может быть сформирована как непосредственным расчетом, так и с использованием, например, контуров по скорости и (или) положению электропривода. Сигнал обратной связи по току может быть измерен, например, по падению напряжения в цепи двигателя на резисторе (шунте) или магнитному полю, которое вызывается его протеканием. При нормальной работе привода можно полагать, что в моменты времени, предшествующие смене знака скорости, знак траекторной компоненты на входе токового контура противоположен знаку скорости, так как идет торможение, и не изменит его сразу после реверса. Таким образом, в течение интервала времени, пока двигатель наращивает момент (из-за инерционности изменения тока в обмотке) для преодоления момента трогания, знаки траекторной, фрикционной и импульсной компонент на входе токового контура привода одинаковы, и даже если вместе или по отдельности эти компоненты приведут к тому, что сигнал на входе двигателя перейдет в насыщение, это не будет мешать преодолению момента трогания, приведенного к двигателю, который не может быть больше пускового момента двигателя. Более того, на этапе, непосредственно предшествующем остановке перед реверсом, противоЭДС также способствует торможению привода, а на интервале времени между остановкой и началом движения равна нулю, и поэтому не мешает нарастанию момента двигателя. Преобразования, обеспечивающие требуемые динамические характеристики при сохранении устойчивости в токовом контуре, осуществляются путем линейной и (или) нелинейной коррекции (в простейшем случае - путем подбора коэффициента усиления по контуру). Следует отметить, что определенный в [8] алгоритм переноса точки ввода воздействия при направлении обратном направлению прохождения сигнала по цепи, относительно которой осуществляется перенос, предусматривает умножение его на передаточную функцию обратную той, которая связывает новую точку ввода с исходной точкой, что в общем случае не всегда обеспечивает его реализуемость. В отличие от этого ввод сигнала на вход замкнутого контура (в частности токового) использует свойство автоматической системы с постоянным коэффициентом в обратной связи воспроизводить входной сигнал на выходе контура в пределах его полосы пропускания в масштабе обратном величине этого коэффициента, что, в частности для рассматриваемого токового контура, позволяет реализовывать коррекцию между входом контура и двигателем достаточно произвольным образом, так как соответствие входного сигнала развиваемому моменту обеспечивается взаимосвязью между током в обмотке и моментом на валу двигателя.
Аппаратная реализация предлагаемых вариантов способов описана ниже. В качестве прототипов для них взят приведенный в [3, фиг. 4] электропривод. Он представляет собой последовательно соединенные датчик тока, сумматор, регулятор тока и электродвигатель, подвижный элемент которого кинематически связан с датчиком скорости, чей выход подключен ко входу формирователя компенсации трения. При этом вход датчика тока связан с цепью обмотки двигателя, выход формирователя компенсации трения, представляющего собой блок умножения, выход которого является выходом формирователя компенсации трения, а входы соединены с выходами блока нелинейности и дифференциатора, входы которых соединены между собой и подключены ко входу формирователя компенсации трения, сумматор имеет вход задания траекторной компоненты, а еще один его вход соединен с выходом формирователя компенсации трения.
Недостатком этого электропривода является отсутствие учета инерционности нарастания тока в обмотке электродвигателя при вводе компенсации по трению, что приводит к увеличению ошибки и снижению быстродействия при отработке нагрузкой знакопеременных по скорости траекторий при наличии в нагружении компоненты типа «сухого» трения.
Целью предлагаемого технического решения является повышение точности и быстродействия электропривода, отрабатывающего траекторию со знакопеременной скоростью движения, при нагружении, содержащем компоненту типа «сухого» трения.
Для достижения заявленного положительного эффекта в электропривод без токового контура, содержащий последовательно соединенные формирователь компенсации трения и сумматор, а также последовательно соединенные электродвигатель и датчик скорости, при этом сумматор также имеет вход для подачи траекторной компоненты сигнала управления, дополнительно введен формирователь упреждения, причем вход формирователя упреждения соединен с выходом датчика скорости, выход формирователя упреждения - со входом формирователя компенсации трения, а выход сумматора - со входом двигателя.
Соответственно, для варианта с токовым контуром в электропривод, содержащий формирователь компенсации трения, последовательно соединенные датчик тока, сумматор, регулятор тока, электродвигатель и датчик скорости, при этом датчик тока установлен с возможностью измерения тока в обмотке электродвигателя, а сумматор также имеет вход, предназначенный для подачи траекторной компоненты сигнала управления, и вход, соединенный с выходом формирователя компенсации трения, введен формирователь упреждения, причем вход формирователя упреждения соединен с выходом датчика скорости, а выход - со входом формирователя компенсации трения.
Все примененные в электроприводе элементы являются по отдельности известными или могут быть получены путем соединения известных элементов известным образом. Датчик тока, сумматор, регулятор тока, датчик скорости могут быть реализованы аналогично описанному в прототипе. В качестве двигателей могут быть использованы электромеханические преобразователи (например силовые реле), коллекторные и бесколлекторные электродвигатели постоянного тока, синхронные электродвигатели с вентильным управлением, асинхронные электродвигатели, применяемые совместно с инверторами напряжения (при трогании и на малых скоростях используется амплитудное регулирование). Датчик скорости может измерять как непосредственно скорость на валу двигателя, так и па валу нагрузки или в любой удобной точке кинематической передачи от вала двигателя к нагрузке. Как уже отмечалось, особенности усилителей мощности, каналов обмена и сопряжения блоков между собой в настоящем описании не рассматриваются в силу очевидности для специалистов и несущественности для описываемых технических решений.
В одном из вариантов исполнения формирователь упреждения может быть реализован с использованием последовательно соединенных блока деления, первого блока определения знака, коммутатора, блока сравнения, таймера и запоминающего устройства, а также дифференциатора, последовательно соединенных блока определения абсолютной величины и сумматора и последовательно соединенных второго блока определения знака и инвертора. При этом первый вход блока деления, вход дифференциатора и вход второго блока определения знака соединены со входом формирователя упреждения, выход дифференциатора соединен со вторым входом блока деления, вход блока определения абсолютной величины соединен с выходом блока деления, выход блока определения абсолютной величины соединен со вторым входом блока сравнения, второй вход коммутатора является входом пороговой величины, второй вход таймера соединен с выходом сумматора, второй вход которого является входом поправки на упреждение, второй вход запоминающего устройства соединен с выходом инвертора, а выход запоминающего устройства соединен с выходом формирователя упреждения.
В другом варианте формирователь упреждения содержит последовательно соединенные нуль-орган и запоминающее устройство, последовательно соединенные блок задержки, блок определения знака и инвертор, выходом подключенный ко второму входу запоминающего устройства. При этом входы нуль-органа и блока задержки соединены со входом формирователя упреждения, а выход запоминающего устройства соединен с выходом формирователя упреждения.
Еще один вариант формирователя упреждения содержит блок задержки и последовательно соединенные масштабирующий усилитель и сумматор. При этом входы масштабирующего усилителя и блока задержки соединены со входом формирователя упреждения, выход блока задержки соединен со вторым входом сумматора, выход которого соединен с выходом формирователя упреждения.
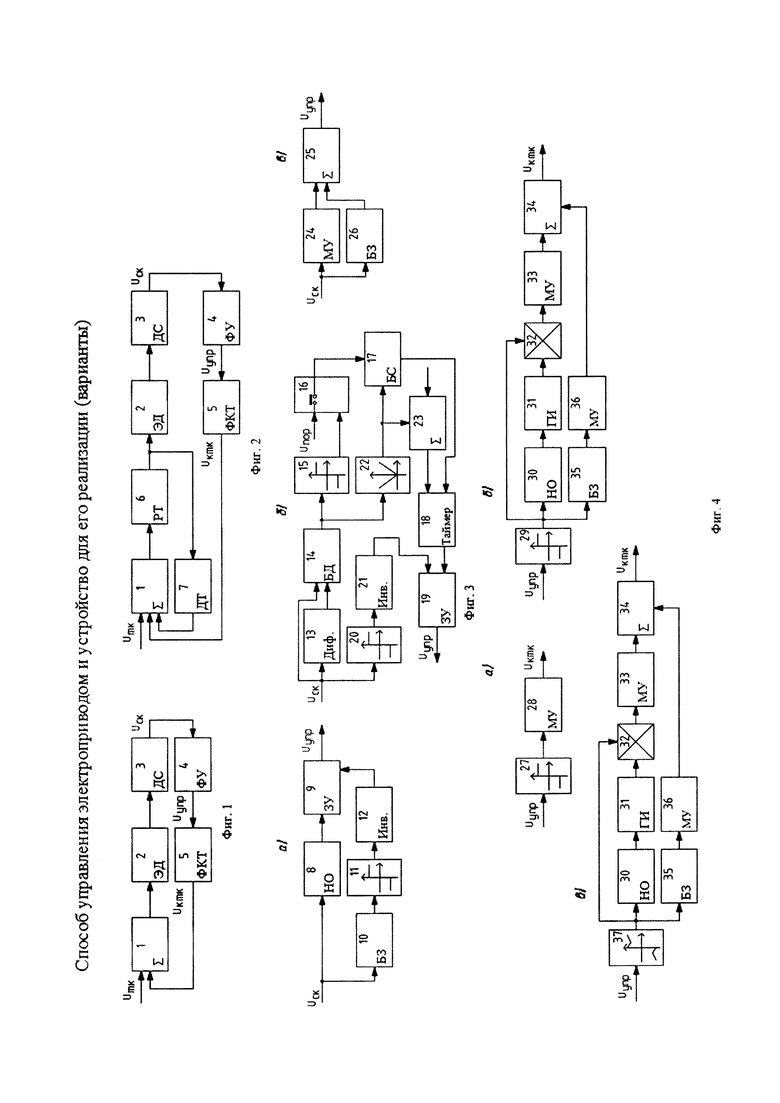
Для иллюстрации предлагаемых технических решений приведены функциональные схемы: на фиг. 1 - привода без токового контура, на фиг. 2 - привода с токовым контуром, на фиг. 3 - вариантов формирователей упреждения соответственно с нуль-органом (а) и без него (б, в), на фиг. 4 - вариантов формирователя компенсации трения.
На фиг. 1 показаны последовательно соединенные сумматор (1), электродвигатель (ЭД) (2), датчик (3) скорости (ДС), формирователь (4) упреждения (ФУ) и формирователь 5 компенсации трения (ФКТ), выходом соединенный со входом сумматора (1). Другой вход сумматора (1) служит для подачи траекторной компоненты сигнала управления Uтк.
На фиг. 2 изображены последовательно соединенные сумматор (1), регулятор (6) тока (РТ), электродвигатель (2), датчик (3) скорости, формирователь (4) упреждения и формирователь (5) компенсации трения, выходом соединенный со входом сумматора (1), а также датчик (7) тока (ДТ), вход которого связан с цепью, соединяющей выход регулятора (6) тока с обмоткой электродвигателя (2), а выход датчика (7) тока подключен к соответствующему входу сумматора (1). Еще один вход сумматора (1) служит для подачи траекторной компоненты сигнала управления Uтк.
На фиг. 3а показаны последовательно соединенные нуль-орган (НО) (8) и запоминающее устройство (ЗУ) (9), а также последовательно соединенные блок (10) задержки (БЗ), блок (11) определения знака (БОЗ) и инвертор (12), выход которого соединен со вторым входом запоминающего устройства (9). При этом входы нуль-органа (8) и блока (10) задержки соединены со входом формирователя (4) упреждения, а выход запоминающего устройства 9 - соответственно с выходом формирователя (4) упреждения.
На фиг. 3б приведены последовательно соединенные дифференциатор (13), блок (14) деления (БД), первый блок (15) определения знака, коммутатор (16), блок (17) сравнения (БС), таймер (18) и запоминающее устройство (19), а также блок (22) формирования абсолютной величины (модуля) (БФМ), выход которого соединен со вторым входом блока (17) сравнения и первым входом сумматора (23), и последовательно соединенные второй блок (20) определения знака и инвертор (21), выходом соединенный со вторым входом запоминающего устройства (19). При этом второй вход таймера (18) соединен с выходом сумматора (23), второй вход которого служит для учета упреждения, вход блока (22) формирования абсолютной величины соединен с выходом блока (14) деления, вход дифференциатора (13) соединен со вторым входом блока (14) деления и входом второго блока (20) определения знака и является входом формирователя (4) упреждения, а выход запоминающего устройства (19) является выходом формирователя (4) упреждения. У коммутатора (16) показан второй вход, на который подается некоторое пороговое значение. Соответствующий вход как внешний на формирователь (4) упреждения на фиг. 1, 2 не показан, как и второй вход сумматора (23), так как соответствующие величины могут быть сформированы внутри формирователя упреждения, а возможность их получения извне не является существенной для предлагаемого технического решения.
На фиг. 3в показаны блок (26) задержки и последовательно соединенные масштабирующий усилитель (24) и сумматор (25). Выход блока (26) задержки соединен со вторым входом сумматора (25), выход которого соединен с выходом формирователя (4) упреждения, а входы блока (26) задержки и масштабирующего усилителя (24) - соответственно со входом формирователя (4) упреждения.
На фиг. 4а изображены последовательно соединенные блок (27) определения знака и масштабирующий усилитель (28). При этом вход блока (27) определения знака соединен со входом формирователя (5) компенсации трения, а выход масштабирующего усилителя (28) - с выходом формирователя (5) компенсации трения.
На фиг. 4б показаны последовательно соединенные блок (29) определения знака, нуль-орган (30), генератор (31) импульсов, блок (32) умножения, первый масштабирующий усилитель (33) и сумматор (34), а также последовательно соединенные блок (35) задержки и второй масштабирующий усилитель (36). При этом вход блока (35) задержки и второй вход блока (32) умножения соединены со входом нуль-органа (30), выход второго масштабирующего усилителя (36) соединен со вторым входом сумматора (34), вход блока (29) определения знака, соединен со входом формирователя (5) компенсации трения, а выход сумматора (34) - с выходом формирователя (5) компенсации трения.
Схема, приведенная на фиг. 4в, отличается от приведенной на фиг. 4б тем, что блок (29) определения знака заменен на блок (37) нелинейности.
Работа приводов осуществляется следующим образом.
В вариантах привода без токового контура на первый вход сумматора (1) подается сигнал, соответствующий траекторной компоненте, то есть такой, который обеспечит движение нагрузки (подвижного элемента, изменение положения которого следует обеспечить), кинематически связанной с подвижным элементом двигателя, например валом, при отсутствии воздействия на привод возмущений. Под действием этого сигнала (после соответствующего усиления по мощности и напряжению) подвижный элемент (ротор, шток) электродвигателя (2) приходит в движение, что вызывает изменение сигнала с датчика (3) скорости, установленного с возможностью измерения скорости движения нагрузки. При реверсировании в случае наличия «сухого» трения движение остановится до тех пор, пока развиваемый электродвигателем (2) момент не превысит момент трения покоя. Это вызовет ошибку в отработке нагрузкой требуемого закона движения и временную задержку в приведении фактического закона движения в трубку допустимых отклонений относительно требуемого, то есть уменьшит быстродействие. Таким образом, возникает необходимость в преодолении за кратчайшее время трения покоя при том, что напряжение питания ограничено техническими характеристиками электродвигателя (2), которому также присуща инерционность из-за ненулевого значения его электрической постоянной времени. Поэтому на электродвигатель (2) следует подать компенсирующий сигнал в момент его остановки или даже ранее. То есть сформировать опережение по отношению к изменению знака скорости. С этой целью сигнал с датчика (3) скорости подается на формирователь (4) упреждения, который сформирует сигнал управления одновременно или с опережением к обнулению сигнала с датчика (3) скорости.
Приведенный на фиг. 3а вариант формирователя (4) упреждения выдает сигнал при обнулении сигнала с датчика (3) скорости. Формирование сигнала производится следующим образом. Сигнал с датчика (3) скорости поступает на нуль-орган (8), сигнал на выходе которого имеет одно значение (например ноль или низкий уровень), когда на его входе ненулевые значения, и другое значение (например единица или высокий уровень), когда на его входе будет нулевое значение. По сигналу с нуль-органа, соответствующему прохождению скорости через ноль, производится перезапись в запоминающем устройстве (9), например устройстве выборки-хранения или оперативно-запоминающем устройстве. Поскольку предполагается, что знак скорости изменится после остановки, сигнал с датчика (3) скорости также подается на блок (10) задержки, чтобы иметь его значение до обнуления. Задержка устанавливается не менее длительности нарастания момента двигателя до уровня момента трогания, приведенного к валу двигателя, и обеспечивающей достаточно низкую чувствительность к случайным шумам в сигнале с датчика (3) скорости при близких к нулю его значениях. Задержанный сигнал подается на блок (11) определения знака. Блок (11) определения знака выдает релейный сигнал с двумя различимыми уровнями, например 1 и минус 1, соответствующими знаку скорости перед обнулением. Полученное значение инвертируется (меняет знак) в инверторе (12), и это значение запоминается в запоминающем устройстве (9) на интервале времени, соответствующем получению сигнала высокого уровня с нуль-органа (8). В результате с момента начала обнуления знака скорости на выходе запоминающего устройства (9) сигнал соответствует знаку ожидаемой скорости после окончания остановки.
При реализации формирователя упреждения по схеме фиг. 3б работа его производится так. В дифференциаторе (13) вычисляется производная от входного сигнала, пропорционального скорости нагрузки, то есть получается сигнал пропорциональный ускорению. В блоке (9) деления производится деление сигнала пропорционального скорости на сигнал пропорциональный ускорению. Если знаки скорости и ускорения различны, то кратное деления будет являться оценкой интервала времени, через которое скорость обнулится после текущего момента времени. В блоке (15) определения знака формируется сигнал, соответствующий знаку частного, полученного из блока (9) деления. Этот сигнал выдается как управляющий на коммутатор (16). Когда сигнал с выхода блока (15) определения знака соответствует отрицательному значению частного с выхода БД (9), через коммутатор (16) на вход блока (17) сравнения передается положительное пороговое значение (в противном случае ноль), соответствующее малому интервалу времени, на протяжении которого с достаточно высокой вероятностью торможение не сменится ускорением. На второй вход блока (17) сравнения подается сформированный блоком (22) абсолютной величины модуль частного, полученного из БД (9). Если модуль частного меньше пороговой величины, что может иметь место только, когда частное отрицательно, так как в противном случае на вход БС (17) по соответствующему входу приходит ноль, блок (17) сравнения выдает управляющий сигнал на запускающий вход таймера (18). Время, которое должен отработать таймер (18), формируется в сумматоре (23) как разность между модулем частного, получаемым из блока (22) абсолютной величины, и величиной соответствующей требуемому упреждению, которая подается на второй вход сумматора (23). Полученное значение времени отсчета выдается с выхода сумматора (23) на второй вход таймера (18). Когда отсчет таймера доходит до нуля, он выдает управляющий сигнал на запоминающее устройство (19), по которому в нем производится перезапись хранящегося значения. Само перезаписываемое значение формируется аналогично вышеописанному для фиг. 3а с помощью блока (20) определения знака и инвертора (21). При этом на вход блока (20) определения знака подается сигнал, соответствующий скорости нагрузки с выхода датчика (3) скорости. По указанной выше причине знак скорости изменяется инвертором (21) на противоположный и подается на второй вход запоминающего устройства (19). Блок задержки в этом случае не нужен, так как упреждение учтено сигналом смещения на втором входе сумматора (23). Таким образом, на выходе запоминающего устройства (19) формируется сигнал, знак которого соответствует ожидаемому знаку скорости после обнуления, а момент начала его выдачи опережает ожидаемый момент времени обнуления скорости.
Функциональная схема, приведенная на фиг. 3в, реализует зависимость (3а). На входы масштабирующего усилителя (24) и блока (26) задержки поступает сигнал, соответствующий скорости нагрузки, с датчика (3) скорости. В сумматоре (25) из соответствующим образом отмасштабированного сигнала с выхода МУ (24) вычитается сигнал с выхода блока (26) задержки, домноженный на коэффициент по своему входу сумматора (25). Учитывая сказанное при выводе зависимости (3а), сигнал на выходе сумматора (25) будет пропорционален сигналу скорости в момент времени t+μΔt относительно текущего момента времени t (Δt - задержка, вносимая БЗ (26). То есть в данном варианте реализации формирователя (4) упреждения его выходной сигнал пропорционален ожидаемой скорости, а не только ее знаку.
С выхода формирователя (4) упреждения сигнал поступает на вход формирователя (5) компенсации трения. В простейшем случае реализации (фиг. 4а) в ФКТ (5) сигнал проходит через блок (27) определения знака и масштабирующий усилитель (28). В этом случае формируется только сигнатурная компонента компенсации трения, а масштабирующий усилитель (28) доводит величину сигнала на выходе ФКТ (5) до уровня, соответствующего, например, величине трения движения или трения покоя.
При реализации формирователя (5) компенсации трения по варианту схемы фиг. 4б входной сигнал поступает на блок (29) определения знака, выполненного с возможностью выдавать трехпозиционный сигнал (например, положительному входному сигналу ставить в соответствие единицу, отрицательному - минус единицу, а моменту смены знака - ноль). С выхода блока (29) определения знака сигнал передается на вход перемножителя (32) (для присвоения знака результату), нуль-орган (30) и блок (35) задержки. Нуль-орган (30) при поступлении на его вход нулевого сигнала вырабатывает управляющий сигнал, который запускает генератор (31) импульсов, выполненный как одновибратор. Длительность и форма заднего фронта импульса определяются конкретной реализацией схемы одновибратора. Полученный импульс с выхода ГИ (31) подается на перемножитель (32). Перемножитель (32) присваивает импульсу знак сигнала на входе ФКТ (5). Так как длительность импульса на выходе ГИ (31) больше длительности сигнала с нуль-органа (30) при смене знака входного сигнала на входе ФКТ (5), то сигнал на выходе перемножителя (32) имеет либо знак ожидаемой после остановки скорости, либо нулевое значение. Сигнал с выхода перемножителя (32) после масштабирующего усилителя (33) доводится до уровня, соответствующего импульсной компоненте компенсации трения. Блок (35) задержки и масштабирующий усилитель (36) формируют аналогично описанному про работу формирователя (5) компенсации трения для схемы фиг. 4а сигнатурную компоненту сигнала компенсации трения. Сумматор (34) объединяет обе компоненты и выдает суммарный сигнал компенсации трения.
В отличие от реализации ФКТ (5) по схеме фиг. 4б при его реализации по схеме фиг.4в входной сигнал поступает на блок (37) нелинейности, который формирует зависимость между моментом трения и ожидаемой скоростью нагрузки для конкретного случая, то есть более общего вида чем релейная, но также обеспечивающую выдачу нулевого сигнала при смене знака сигнала на его входе (например, типа приведенной в [3] на фиг. 3). Поэтому функционирование цепочки от входа нуль-органа (30) до входа масштабирующего усилителя (33) такое же как для функциональной схемы по фиг. 4б. Импульс на выходе перемножителя (32) имеет длительность, задаваемую генератором импульсов (31) и знак ожидаемой после остановки скорости. Однако, величина будет другой, так как умножение при присвоении знака производится не на единицу. Это вызывает необходимость использования масштабирующего усилителя (33) с измененным коэффициентом передачи. Цепочка блок (35) задержки, масштабирующий усилитель (36) вырабатывает компоненту компенсирующего сигнала, зависящую от скорости движения нагрузки. Таким образом, на выходе сумматора (34) сигнал соответствует сумме импульсной компоненты, позволяющей быстро стронуть с места нагрузку после остановки, и компоненты пропорциональной трению движения. То есть вариант формирователя (5) компенсации трения по схеме фиг. 4в является наиболее функциональным из рассмотренных, но на его вход с формирователя (4) упреждения нужно подавать сигнал пропорциональный не знаку, а ожидаемой после остановки скорости движения нагрузки.
С выхода формирователя (5) компенсации трения сигнал поступает на второй вход сумматора (1), где добавляется к траекторной компоненте сигнала управления электродвигателем (2). Наличие сигнала компенсации трения на входе электродвигателя (2), который поступает с опережением к моменту смены знака скорости нагрузки, позволяет уменьшить влияние инерционности нарастания тока в обмотке двигателя, сокращая время, требуемое на развитие электродвигателем (2) момента, превышающего момент трения покоя. Тем самым уменьшаются ошибки отработки электроприводом траекторной компоненты сигнала управления, и повышается его быстродействие. После страгивания компенсирующий сигнал не приводит к дополнительному увеличению ошибки, так как:
- импульсная компонента компенсирующего трение сигнала обнуляется;
- сигнатурная часть фрикционной компоненты направлена против трения движения и, по крайней мере частично, компенсирует его возмущающее действие на отработку задаваемого закона движения;
- переменная часть фрикционной компоненты также направлена против трения движения (его переменной составляющей), а наличие опережения ввиду его малости не приводит к существенному различию компенсируемого возмущения и момента двигателя, развиваемого под действием переменной части фрикционной компоненты, более того, из-за инерционности обмотки малое опережение позволяет точнее воспроизвести компенсируемое возмущение.
То есть положительный эффект имеет место не только непосредственно при реверсе, но и после него.
Работа электропривода с токовым контуром обратной связи, в основном, аналогична вышеописанному. Отличия вызваны тем, что в разрыв между сумматором (1) и электродвигателем (2) установлен регулятор (6) тока, сумматор (1) дополнен еще одним входом, к которому подключен датчик (7) тока, измеряющий ток в обмотке (цепи питания) электродвигателя (2). При этом сигнал на выходе сумматора (1) содержит три компоненты: траекторную, компенсации трения (фрикционную) и обратной связи по току, а траекторная компонента формируется таким образом, чтобы пропорциональный ей ток в обмотке электродвигателя (2) приводил к движению нагрузки в соответствии с требуемым законом. Сигнал с выхода сумматора (1) подается на вход регулятора (6) тока. В регуляторе (6) тока сигнал усиливается и преобразовывается с целью достижения требуемых динамических характеристик привода при обеспечении устойчивости, после чего подается на электродвигатель (2), приводя его в движение. Датчик (3) скорости, формирователь (4) упреждения и формирователь (5) компенсации трения работают так же как и в приводе без токового контура. Датчик (7) тока измеряет ток в обмотке электродвигателя (2) и выдает сигнал, соответствующий измеренному току, на третий вход сумматора (1). Датчик тока может быть как гальванически связан с обмоткой двигателя (например выполнен в виде шунта), так и гальванически развязанным от нее (например, использующий эффект Холла). Фазировка выдаваемого датчиком (7) тока сигнала должна быть такой, чтобы с учетом знака коэффициента суммирования по третьему входу сумматора (1) формировался контур с отрицательной обратной связью. Так как при наличии токового контура в приводе каждая компонента на входе сумматора (1) формирует соответствующий ток, коэффициент по второму его входу устанавливается таким, чтобы компонента тока в обмотке, вызванная сигналом с выхода формирователя (5) компенсации трения, соответствовала расчетным моментам компенсации.
Таким образом, за счет опережающей подачи на вход сумматора (1) сигнала компенсации трения в приводе с токовым контуром уменьшается ошибка отработки требуемого закона движения нагрузки, задаваемого траекторной компонентой сигнала управления, и повышается его быстродействие. Дополнительный эффект достигается за счет того, что использование контура с отрицательной обратной связью по току можно рассматривать как способ снижения инерционности нарастания тока в обмотке электродвигателя (2). Действительно, если коэффициент по токовому контуру равен К и электрическая постоянная обмотки равна Тдв, то в силу известных положений теории автоматического управления [8] постоянная времени замкнутого токового контура будет равна Тдв/К.
Как видно из приведенного описания, получение положительного эффекта в виде уменьшения ошибки отработки требуемого закона движения нагрузки и повышения быстродействия электропривода достигается совокупностью предлагаемых операций и устройств для их осуществления, которая не использовалась ранее для достижения указанной цели.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Сайт «Естественные науки», Раздел «Сила трения. Скольжение», http://estnauki.ru/fizika/3-fizika/431-sila-treniya-skolzhenie.html.
2. Теория автоматического управления. Устройства и элементы систем автоматического регулирования и управления. Книга 3. Исполнительные устройства и сервомеханизмы. Глава 7. ОСОБЕННОСТИ РАБОТЫ СЛЕДЯЩЕГО ПРИВОДА ПРИ СУБКРИТИЧЕСКИХ СКОРОСТЯХ ИЗМЕНЕНИЯ ВХОДНОГО СИГНАЛА, http://stu.scask.ru/book_ar3.php?id=10.
3. Малафеева А.А., Патент РФ №2079961, МПК Н02Р 5/06, 1992 г.
4. Буревич А.А., Казнадий О.В. «Методы уменьшения влияния сухого трения в системе угловой стабилизации микроспутника с использованием двигателей-маховиков», http://www.rusnauka.com/3_ANRR_2009/Tecnic/39926.doc.htm.
5. Патент РФ №2072545, МПК G05B 11/01, 1993 г.
6. Воронин С.Г., Электропривод летательных аппаратов: Учебно-методический комплекс - Offline версия 1.0. - Челябинск, 1995-2011. Глава 9, Следящие электроприводы, Параграф 9.5. http://model.exponenta.ru/epivod/glv_090.htm.
7. СУХОЕ ТРЕНИЕ И КОМПЕНСАЦИЯ ЕГО ВЛИЯНИЯ, http://proizvodim.com/suxoe-trenie-i-kompensaciya-ego-vliyaniya.html.
8. Учебно-образовательный портал «Лекции-онлайн». Теория автоматического управления. Лекция 4: Основные характеристики систем автоматического управления. Глава 3. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ. 3.4. ПРАВИЛА ПРЕОБРАЗОВАНИЯ СТРУКТУРНЫХ СХЕМ, http://mylect.ru/2011-06-03-15-41-26/tau-theory/131--4-.html?start=3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способы симуляции трения покоя и устройства для их реализации (варианты) | 2021 |
|
RU2779278C1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| Устройство для вычисления статического момента вентильного электропривода | 1979 |
|
SU947880A1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2079162C1 |
| Электропривод переменного тока | 1978 |
|
SU765969A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Устройство для управления подъемно-транспортной установкой | 1983 |
|
SU1159847A1 |
Изобретение относится к области электротехники и может быть использовано в управляемом электроприводе, в том числе с ограниченным углом поворота с нагружением, содержащим компоненту типа «сухого» трения. Технический результат - повышение быстродействия и точности отработки электроприводом входных сигналов, приводящих к изменению знака скорости, при наличии в нагружении компоненты типа «сухое» трение, в том числе, когда трение покоя превышает трение движения на начальном участке разгона. Способ управления электроприводом, в котором формируют траекторную компоненту сигнала управления, исходя из требуемого закона движения нагрузки, кинематически связанной с подвижным элементом двигателя, измеряют скорость движения нагрузки, формируют компоненту сигнала управления пропорциональную статической фрикционной характеристике, и прибавляют полученное значение к траекторной компоненте сигнала управления, а полученную сумму используют для управления двигателем. Особенностью является то, что используя измеряемую скорость нагрузки, определяют ожидаемые моменты остановки перед сменой знака скорости нагрузки, формируют фрикционную компоненту сигнала управления с использованием скорости, ожидаемой после возобновления движения нагрузки, формируют фрикционную компоненту сигнала управления с опережением к моменту ожидаемого возобновления движения нагрузки. Электропривод содержит двигатель и кинематически связанный с его подвижным элементом датчик скорости, последовательно соединенные формирователь компенсации трения и сумматор, при этом сумматор также имеет вход для сигнала от внешней системы. Особенностью является то, что в него введен формирователь упреждения, причем вход формирователя упреждения соединен с выходом датчика скорости, выход формирователя упреждения соединен со входом формирователя компенсации трения, а выход сумматора соединен со входом двигателя. 6 н. и 6 з.п. ф-лы, 4 ил.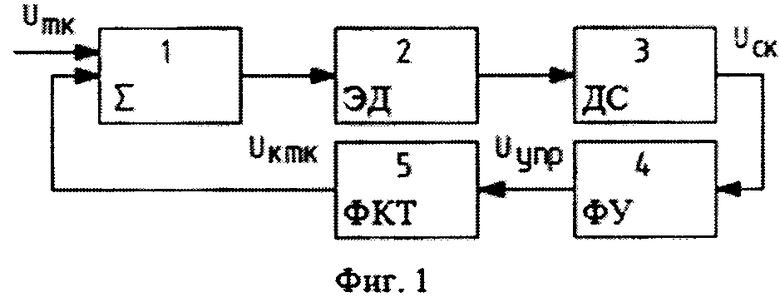
1. Способ управления электроприводом, заключающийся в том, что формируют траекторную компоненту сигнала управления, исходя из требуемого закона движения нагрузки, кинематически связанной с подвижным элементом двигателя, измеряют скорость движения нагрузки, формируют компоненту сигнала управления, пропорциональную статической фрикционной характеристике, и прибавляют полученное значение к траекторной компоненте сигнала управления, а полученную сумму используют для управления двигателем, отличающийся тем, что, используя измеряемую скорость нагрузки, определяют ожидаемые моменты остановки перед сменой знака скорости нагрузки, формируют фрикционную компоненту сигнала управления с использованием скорости, ожидаемой после возобновления движения нагрузки, формируют фрикционную компоненту сигнала управления с опережением к моменту ожидаемого возобновления движения нагрузки.
2. Способ управления электроприводом, заключающийся в том, что формируют траекторную компоненту сигнала управления, исходя из требуемого закона движения нагрузки, кинематически связанной с подвижным элементом двигателя, измеряют скорость движения нагрузки, формируют фрикционную компоненту сигнала управления, пропорциональную статической фрикционной характеристике, и прибавляют полученное значение к траекторной компоненте сигнала управления, отличающийся тем, что, используя измеряемую скорость нагрузки, определяют ожидаемые моменты остановки перед сменой знака скорости нагрузки, формируют фрикционную компоненту сигнала управления с использованием скорости, ожидаемой после возобновления движения нагрузки, формируют дополнительную компоненту сигнала управления конечной длительности, имеющую в начале ее формирования знак скорости, ожидаемой после возобновления движения нагрузки, которую добавляют к сумме фрикционной и траекторной компонент сигнала управления, а полученный результат используют для управления двигателем, при этом формирование фрикционной и конечной длительности компонент сигнала управления осуществляют с опережением к моменту ожидаемого возобновления движения нагрузки.
3. Способ управления электроприводом, заключающийся в том, что формируют траекторную компоненту сигнала управления, исходя из требуемого закона движения нагрузки, кинематически связанной с подвижным элементом двигателя, измеряют скорость движения нагрузки, формируют фрикционную компоненту сигнала управления, пропорциональную статической фрикционной характеристике, и прибавляют полученное значение к траекторной компоненте сигнала управления, измеряют ток двигателя и формируют сигнал обратной связи по току, алгебраически суммируют траекторную, обратной связи по току и фрикционную компоненты сигнала управления и эту сумму усиливают и преобразовывают для обеспечения добротности при сохранении устойчивости и качества регулирования в контуре управления по току, а полученный сигнал используют для управления двигателем, отличающийся тем, что, используя измеряемую скорость нагрузки, определяют ожидаемые моменты остановки перед сменой знака скорости нагрузки, формируют фрикционную компоненту сигнала управления с использованием скорости ожидаемой после возобновления движения нагрузки, формируют фрикционную компоненту сигнала управления с опережением к моменту ожидаемого возобновления движения нагрузки.
4. Способ управления электроприводом, заключающийся в том, что формируют траекторную компоненту сигнала управления, исходя из требуемого закона движения нагрузки, кинематически связанной с подвижным элементом двигателя, измеряют скорость движения нагрузки, формируют фрикционную компоненту сигнала управления, пропорциональную статической фрикционной характеристике, измеряют ток двигателя и формируют сигнал обратной связи по току, и при этом для формирования сигнала управления суммируют фрикционную, траекторную и обратной связи по току компоненты, сигнал управления усиливают и преобразовывают для обеспечения добротности при сохранении устойчивости и качества регулирования в контуре управления по току, а полученный сигнал используют для управления двигателем, отличающийся тем, что, используя измеряемую скорость нагрузки, определяют ожидаемые моменты остановки перед сменой знака скорости нагрузки, формируют фрикционную компоненту сигнала управления с использованием скорости, ожидаемой после возобновления движения нагрузки, формируют дополнительную компоненту сигнала управления конечной длительности, имеющую в начале ее формирования знак скорости, ожидаемой после возобновления движения нагрузки, которая для получения сигнала управления добавляется к просуммированным фрикционной, траекторной и обратной связи по току компонентам, при этом формирование фрикционной и конечной длительности компонент сигнала управления осуществляют с опережением к моменту ожидаемого возобновления движения нагрузки.
5. Способ управления электроприводом по п. 2 или 4, отличающийся тем, что момент начала формирования дополнительной компоненты устанавливают не позднее начала формирования фрикционной компоненты;
6. Способ управления электроприводом по п. 2 или 4, отличающийся тем, что уровень по амплитуде начального участка дополнительной компоненты устанавливают большим уровня, соответствующего моменту трогания.
7. Способ управления электроприводом по п. 2 или 4, отличающийся тем, что момент начала формирования дополнительной компоненты устанавливают не позднее начала формирования фрикционной компоненты, а уровень по амплитуде начального участка дополнительной компоненты устанавливают большим уровня, соответствующего моменту трогания.
8. Электропривод, содержащий двигатель и кинематически связанный с его подвижным элементом датчик скорости, последовательно соединенные формирователь компенсации трения и сумматор, при этом сумматор также имеет вход для сигнала от внешней системы, отличающийся тем, что в него введен формирователь упреждения, причем вход формирователя упреждения соединен с выходом датчика скорости, выход формирователя упреждения соединен со входом формирователя компенсации трения, а выход сумматора соединен со входом двигателя.
9. Электропривод, содержащий формирователь компенсации трения, двигатель и кинематически связанный с его подвижным элементом датчик скорости, последовательно соединенные датчик тока, сумматор и регулятор тока, при этом датчик тока установлен с возможностью измерения тока в обмотке двигателя, при этом сумматор также имеет вход для сигнала от внешней системы и вход, соединенный с выходом формирователя компенсации трения, отличающийся тем, что в него введен формирователь упреждения, причем вход формирователя упреждения соединен с выходом датчика скорости, а выход соединен со входом формирователя компенсации трения.
10. Электропривод по п. 8 или 9, отличающийся тем, что формирователь упреждения содержит блок задержки и последовательно соединенные масштабирующий усилитель и сумматор, при этом входы масштабирующего усилителя и блока задержки соединены между собой и со входом формирователя упреждения, выход блока задержки соединен со вторым входом сумматора, выход которого соединен с выходом формирователя упреждения.
11. Электропривод по п. 8 или 9, отличающийся тем, что формирователь компенсации трения содержит последовательно соединенные блок нелинейности, нуль-орган, генератор импульсов, блок умножения, первый масштабирующий усилитель и сумматор, последовательно соединенные блок задержки и второй масштабирующий усилитель, при этом вход блока нелинейности соединен со входом формирователя компенсации трения, входы блока задержки и нуль-органа соединены между собой и со вторым входом блока умножения, выход второго масштабирующего усилителя соединен со вторым входом сумматора, выход которого соединен с выходом формирователя компенсации трения.
12. Электропривод по п. 8 или 9, отличающийся тем, что формирователь упреждения содержит блок задержки и последовательно соединенные масштабирующий усилитель и сумматор, при этом входы масштабирующего усилителя и блока задержки соединены между собой и со входом формирователя упреждения, выход блока задержки соединен со вторым входом сумматора, выход которого соединен с выходом формирователя упреждения, а формирователь компенсации трения содержит последовательно соединенные блок нелинейности, нуль-орган, генератор импульсов, блок умножения, первый масштабирующий усилитель и сумматор, последовательно соединенные блок задержки и второй масштабирующий усилитель, при этом вход блока нелинейности соединен со входом формирователя компенсации трения, входы блока задержки и нуль-органа соединены между собой и со вторым входом блока умножения, выход второго масштабирующего усилителя соединен со вторым входом сумматора, выход которого соединен с выходом формирователя компенсации трения.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2079867C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ | 1993 |
|
RU2072545C1 |
| Электропривод | 1987 |
|
SU1617597A1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ БОЕПРИПАС | 1999 |
|
RU2146801C1 |
| JP 2014122017 A, 03.07.2014 | |||
| US 20070096672 A1, 03.05.2007 | |||
| ВОЛОКНИСТАЯ МАССА ДЛЯ ИЗГОТОВЛЕНИЯ УПАКОВОЧНОГО МАТЕРИАЛА | 2004 |
|
RU2256019C1 |
| WO 2006075775 A1, 20.07.2006. | |||

