1 14
Изобретение относится к вибронз- мерительной технике и предназначено для контроля состояния подшипников качения в процессе эксплуатации.
Цель изобретения - повышение точ- кости определения состояния подшипников качения,
Сущность способа заключается в том, что пйоизводя г автонормирование сигнала вибрации по пиковому его значению. Нормирование сигнала необходимо для приведения сигналов вибрации подшипников, различных по уровню, к выбранному единичному уровню для дальнейшей их обработки Реальный ин формативньй спектр вибрации подшипников для контроля их состояния составляет полосу частот от 1 кГц и вьше, так как низкочастотные колебания ниже 1 кГц вносят большие помехи, -свя занные с дисбалансом валов, работой близко расположенных механизмов с зубчатыми передачами и т.д. Сущность способа заключается также в том, что контроль ведут по р азности пиковых . значений положительных и отрицательных полуволн ударных импульсов по разности среднеквадратических значений положительных и отрицательных полуволн ударных импульсов и по разности результирующих значений раз костей пиковых значений положительных и отрицательных полуволн и разности среднеквадратических значений положительных и отрицательных полуволн ударных импульсов. Разность пиковых значений положительных и отрицательных полуволн ударных импульсов позволяет судить о величине дефекта, поскольку она возникает при появлении дефекта в подшипнике (скол йа телах качениЯ;, раковина на дорожке качения и т д.) и растет пропорционально увеличению дефекта. Разность среднеквадратических значений указывает на протяженность дефекта или увеличение количества дефектов Увеличение разности среднеквадратических значений пропорционально удлинению раковины на дорожке качения, увеличению протяженности трещины или увеличению количест ва единичных дефектов как на телах, так и н а дорожках качения. Разность значени й разности пиковых значений отрицательных и положительных полуволн и средпеквадратических значений положительных и отрицательных, полуволн ударного импульса оактёризует стадии работы подшипника., При большой
8590 2
разности между пиковыми значениями и большой разности среднеквадратических значе 1ий разность значений указанных разностей практически равна или близка нулю и указывает на то, что- подшипник работает в аварийном режиме и близок к разрушению.
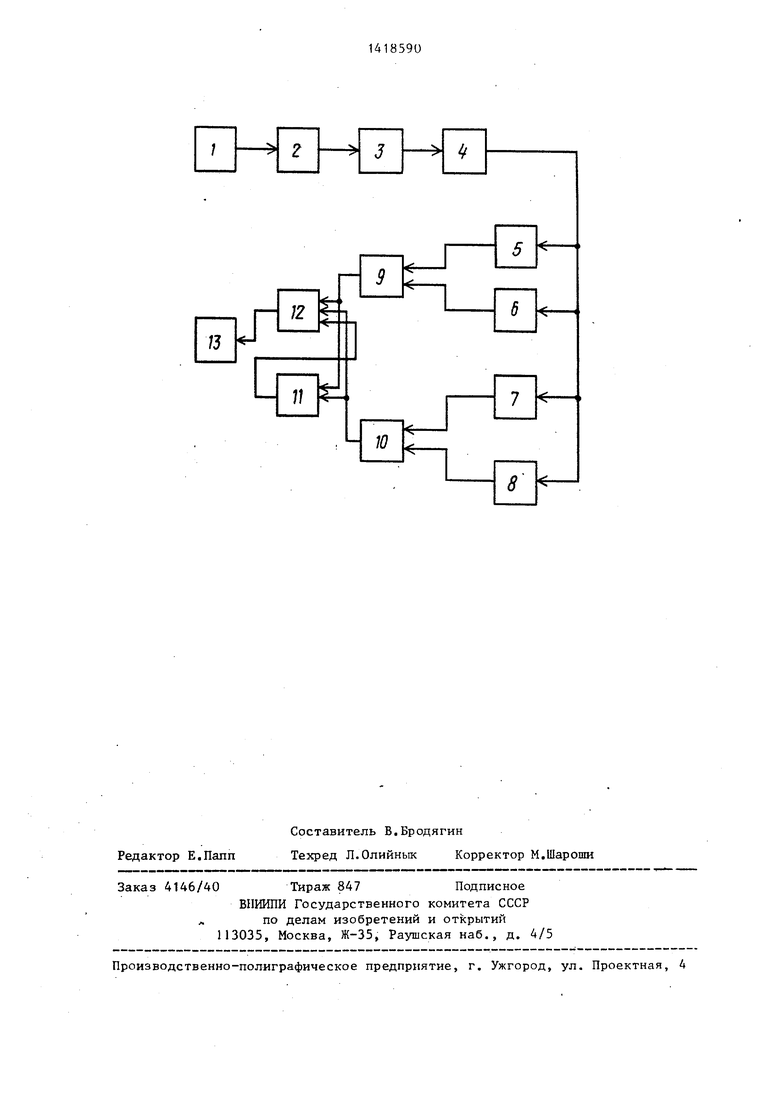
На чертеже изображена блок-схема
0 устройства для осуществления способа. Устройство содержит последователь но соединенные вибропреобразователь 1j согласующий усилитель 2, фильтр 3 верхних частот, блок 4 автонормирова5 ния, пиковьй детектор 5 отрицательных полуволн ударных импульсов, пиковьй детектор 6 положительных полуволн ударных импульсов, детектор 7 средне- квадратических значений положительных
Q полуволн ударных импульсов, детектор 8 средкеквадратических значений отрицательных полуволн ударных импульсов, электрометрический вычитатель 9 пиковых значений положительньгх и от5 рицательных полуволн ударных импулы-- сов, электрометрических значений положительных и отрицательных полуволн ударных импульсов, электрометрический вычитатель 10 среднеквадратических
« значений положительных и отрицательных полуволн импульсов, электрометрический вычитатель 11 разностей пиковых значений положительных и отрицательных полув опн ударных импульсов i и среднетсвадратических значений по5 ложительных и отрицательных полуволн зздарнык импульсов, режимный переключатель 12, индикатор 13, причем входы гшкового детектора 5 отрицатель- ньзс полуволн ударных импульсов, пи0 кового детектора 6 положительных полуволн ударных импульсов, детектора 7 среднеквадратических значений положительных полуволн ударных импульсов J детектора 8 среднеквадрати5 ческих значений отрицательных
полуволн ударных импульсов соединены с выходом блока 4 автонормирования, а выходы пикового детектора .5 отрицательных полуволн ударных импуль0 сов и пикового детектора 6 положи-; тельных полуволн ударных импульсов соединены соответственно с первым и вторым входами электрометрического вычитателя 9, выходы детектора 7
5 среднеквадратических значений поло- жительнЬк полуволн ударных импульсов и детектора 8 среднеквадрат гческих значений отрицательных полуволн ударных импульсов соединены соответствен31418590
с первым и вторым входами электротапе тр
метрического вычитателя 10, выходы электрометрических вычитателей 9 и 1U соединены соответственно с первым и вторым входами электрометрического вычитателя 11 и первым и вторым входами режимного переключателя 12, выход электрометрического вычитателя 11 соединен с третьим входом режимного переключателя 12, а выход режимного переключателя 12 соединен с входом индикатора 13.
Способ осуществляется следующим образом,
С закрепленного на корпусе подшипника вибропреобразователя 1 электрический сигнал, пропорциональный уровню вибрации подшипника, усиливается согласующим усилителем 2 и подается на вход фильтра верхних частот, с помощью которого срезаются низкочастотные составляющие спектра вибрации ниже 1 кГц, не несущие информации о состоянии подшипника. Далее сигнал поступает на блок 4 автонормированиягде производится нормировка сигнала по пиковому его значению. С выхода блока 4 сигнал поступает одновременно на пиковый детектор 5 отрицательных полуволн ударного импульса, пико- вьй детектор 6 положительных полуволн ударного импульса, детектор 7 средне- квадратических значений положительных полуволн ударного импульса, детектор 8 среднеквадратических значений отрицательных попуволн ударного импульса. Сигнал, снимаемый с пикового детектора 5 отрицательных полуволн ударных импульсов и пикового детектора 6 положительных полуволн ударных импульсов, поступает соответственно на первый и второй входы электрометрического вычитателя 9, ас выхода электрометрического вычитателя 9 на первый вход режимного переключателя 12 и первый вход электрометрического вычитателя 11.
В положении 1 режимного переключателя 12 сигнал с электрометрического вычитателя 9 поступает на индикатор 13. Сигналы, снимаемые с детектора 7 среднеквадратических значений положительных полуволн ударных импульсов и детектора 8 среднеквадратических значений отрицательных полуволн ударных импульсов поступают соответственно на первьй и второй входы электрометрического .вычитателя 10 а с выхода электрометрического вычи
тателя 10 на второй вход режимного переключателя 12 и второй вход электрометрического вычитателя 11.
В положении 2 режимного переключателя 12 сигнал с вьгхода электрометрического вычитателя 10 поступает - на индикатор 13. Сигнал, снимаемый с выхода электрометрического вычитателя 11, поступает на третий вход режимного переключателя 12, на индикатор 13 этот сигнал поступает в па- ложении З режимного переключателя 12„ По стрелке индикатора 13 отсчитывают разностный сигнал положительных и отрицательных пиковых значений ударных импульсов, разностный сигнал положительных и отрицательных среднеквадратических значений ударных импульсов и разность разностных пиковых отрицательных и положительных значений ударных импульс ов и разностных среднеквадратических отрицательных и положительных значений ударных импульсов, пропорциональных величине дефекта в подшипнике.
При снятии показаний возможны три характерных случая.
Первый случай. Разности между пиковыми значениями положительных и отрицательных полуволн ударного импульса и среднеквадратическими значениями положительных и отрицательных полуволн ударного импульса в делениях
шкалы относительно невелики и соизмеримы, т.е. разность между разностями пиковых значений положительных и отрицательных полуволн и среднеквадратическими значениями положительных
и отрицательных полуволн ударного импульса близка к нулю или незначительно от него отличается - это говорит о том, что подшипник работает в нормальном режиме и не имеет-дефекта.
Относительный рост показаний в этом случае указывает на появление мелкой сыпи вследствие, например, усталостного выкрашивания или загрязнения смазки.
Второй случай. Разность между пиковыми значениями положительных и отрицательных полуволн ударного импульса несоизмеримо больше разности между среднеквадратическими значениями положительных и отрицательных по
луволн ударного импульса, и, как следствие, велика разность меяду разностями пиковых значений положительных и отрицательных полуволн и средне514
квадратическими значениями положительных и отрицательных полуволн ударного импульса - это говорит о том, что в г|1одшипнике имеется единичный неболь- ijofl дефект на. дорожках или телах ка |eния.
I Третий случай. При развитии дефекта и появлении новых дефектов раз
ость среднеквадратических и пиковых качений положительных и отрицательных полуволн ударных импульсов возрастает, а разность меяду разностями г иковьгх значений положительных и от- 1|ицательных полуволн и среднеквадра- т|ических значений положительных и 4трицательных полуволн ударного им- 4ульса уменьшаетсяJ а когда она приб jtHSHTCH к нулю, это указывает на то, -:то подшипник работает в. аварийном 51ежиме, дефекты в нем значительны. I Положительный эффект от применения изобретения заключается в повьпиении очности определения состояния под- нипников на ранней стадии появления II них дефектов, а значит, и более to4Horo расчета остаточного ресурса работы подшипника, в исключении аварийных выходов из строя ЙОДШИПНИКОВд
находящихся под периодическим конт ролам, а значит5 и в -сокращении внеплановых простоев машины, а также в большей эффективности планово-предупредительных ремонтов, скорректирован™ йых в соответствии с показаниями прибора, а значитS и в сокращении материальных затрат и времени ремонта
Формула изобретения
1. Способ ко.нтроля состояния подшипников качения, заключакящйся в том, что измеряют сигнал вибрации подшипника, производят автонормирование по пиковому значению сигнала вибрации, измеряют пиковое значение в полосе частот 1/3 октавы с центральной частотой уровень ограниченности частотного спектра вибрации, на которой по среднему абсолютному значению составляет 0,28 величины авто нормированного сигнала, и определяют состояние подшипника по пиковому зна чению сигнала вибраций, отличающийся тем, что, с целью повышения точности определения состояния подшипников, измеряют разности пиковых значений положительных и отрицательных полуволн ударных импульсов . для определения величины дефекта, измеряют разности среднеквадратических значений положительных и отрицательных полуволн ударных импульсов для
определения количества дефектов и их протяженности и измеряют разность результирующих значений, разности пиковых значений положительных и отрицательных полуволн и разности среднеквадратических значений положительных и отоицательных полуволн ударных импульсов для определения степени из иоса подшипника.,
2, Устройства для контроля состоя-
ния подшипников качения, содержащее последовательно соединенные вибропреобразователь , согласующий усилитель, фильтр верхних частот, блок автонормирования, режимный переключатель,
индикатор, отлич ающееся тем, что в него введены детекторы пиковых значений положительных и отрицательных полуволн ударных импульсов-, детекторы среднеквадратическик
значении положительных и отрицательных полуволн ударных импульсов, первый второй и третий электрометрические вычитатели, причем входы детекторов пиковых значений полуволн и детекторов среднеквадратических значений полуволн соединены с выходом
0
5
блока автонормирования, выходы пико- ных детекторов положительных и отрицательных полуволн соединены соответственно с первым и вторым входами первого электрометрического вычита- теля, выходы детекторов среднеквадратических значений положительных и отрицательных полуволн соответственно соединены с первым и вторым входами второго электрометрического вычита- теля,выходы первого и второго электрометрических вычитателей соответственно соединены с первым и вторым входами третьего электрометрического 0 вычитателя и с первым и вторым входами режимного переключателя, выходы третьего электрометрического вычитателя соединены с третьим входом режимного переключателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1984 |
|
SU1201712A1 |
| СЕНСОР ДИАГНОСТИКИ УЗЛОВ ТРЕНИЯ КАЧЕНИЯ | 1992 |
|
RU2036455C1 |
| Устройство для диагностики редуктора | 1990 |
|
SU1739242A1 |
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1980 |
|
SU916999A1 |
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1980 |
|
SU943549A1 |
| СЕНСОР ДЛЯ КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ ПОДШИПНИКОВ КАЧЕНИЯ | 1992 |
|
RU2036454C1 |
| Устройство для контроля состояния узлов трения качения | 1987 |
|
SU1423934A1 |
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1985 |
|
SU1276945A1 |
| Устройство для диагностики состояния подшипника качения | 1990 |
|
SU1767377A1 |
| Устройство для контроля состояния подшипников качения | 1990 |
|
SU1723482A2 |
Изобретение относится к виброизмерительной технике и может быть использовано для контроля состояния подшипников качения. Цель - повъте- ние точности определения состояния подшипников качения. Контроль состояния подшипника ведется по разности пиковых значений положительных и отрицательных полуволн. Параллельно контроль ведется по разности среднеквадратических значений положительных и отрицательных полуволн, а также по разности полученных значений разностей. Вибросигнал нормируется по пиковому значению в полосе информативных частот от кГц и выше и детектируется при помощи пиковых и среднеквадратических детекторов положительных и отрицательных полуволн ударного импульса. Далее при помощи электрометрических вычитателей определяется разность пиковых значений и параллельно - разность среднеквадратических значений полуволн, а также определяется разность этих разностей. Все три значения разностей при помощи режимного переключателя последовательно выводятся на индикатор. Способ позволяет определить величину дефекта по первой разности, количество дефектов и их протяженность - по второй, сделать заключение о степени износа подшипника - по третьей. 2 с.п. ф-лы, 1 ил. Ф (Л
| Устройство для передачи по радио изображений на движущейся киноленте | 1927 |
|
SU13238A1 |
