Изобретение относится к измерительной технике и может быть использовано при испытаниях подшипников качения.
Известно устройство диагностики подшипников качения, содержащее последовательно соединенные вибропреобразователи, коммутатор с встроенным предусилителем заряда, блок автонормирования, фильтр высших частот (ФВЧ), управляемый выходным напряжением, блок амплитудно-частотной характеристики (АЧХ), пиковый детектор, блок аналого-цифрового преобразователя (АЦП) и индикатор [1]
Недостатком этого устройства является отсутствие памяти при отображении скорости разрушения подшипников, что не позволяет рассчитывать их остаточный ресурс.
Наиболее близким по технической сущности к предлагаемому является устройство диагностики узлов трения качения, содержащее последовательно соединенные вибропреобразователи, коммутатор с встроенным предусилителем заряда, заграждающий фильтр напряжения силовой сети, блок автонормирования, ФВЧ, блок АЧХ, пиковый детектор, блок АЦП, блок ввода-вывода и микропроцессорный блок обработки, блок связи по сети, блок индикации и блок управления, соединенные с входом микропроцессорного блока обработки, а также соединенные с выходом блока АЧХ блок регистрации информации об экстремумах сигнала, выходом соединенный с входом блока ввода-вывода, и последовательно соединенные детектор среднего абсолютного значения и фильтр низких частот (ФНЧ), при этом вход блока ввода-вывода соединен с управляющими входами коммутатора с встроенным предусилителем заряда, блока автонормирования, блока ФВЧ и пикового детектора, а также первый и второй детекторы уровня сигнала, входами соединенные соответственно с выходом блока автонормирования и выходом ФВЧ, второй ФНЧ, соединенный с выходом коммутатора с встроенным предусилителем заряда, блок источников опорных напряжений, блок микровыключателей количества задействованных каналов и порядкового номера сенсора, блок сигнализации о работе оборудования, включенные к входу блока ввода-вывода [2]
Недостатком этого устройства являются узкие функциональные возможности по регистрации характера повреждений и самодиагностики.
Технический результат изобретения заключается в расширении функциональных возможностей устройства.
Это достигается тем, что в известное устройство введен второй коммутатор с совмещенными масштабными усилителями, включенный между выходом пикового детектора и входом блока АЦП, при этом второй вход второго коммутатора соединен с выходом первого детектора уровня сигнала, третий вход второго коммутатора соединен с выходом второго детектора уровня сигнала, четвертый и пятый входы второго коммутатора соединены соответственно с выходами ФНЧ и второго ФНЧ, а шестой вход второго коммутатора соединен с выходом блока источников опорных напряжений.
Микропроцессорный блок обработки может быть выполнен на базе однокристальной ЭВМ, а блок ввода-вывода выполнен распределенным по функционально законченным электрическим схемам.
Сущность изобретения заключается в следующем.
Ударные импульсы вибрации несут информацию о динамической толщине слоя смазки и их периодичности (частотный состав после преобразователя Гильберта), указывают на принадлежность дефектов к определенным элементам подшипника, что позволяет судить дополнительно о качестве смазки, "объеме" повреждений и их серьезности (например, лопнувшее внутреннее кольцо), повысить качества контроля за счет расширения функциональных возможностей устройства диагностики. Важное практическое значение имеют вопросы самодиагностики устройства, работающего в жестких производственных условиях. Так, требуется точная информация о состоянии кабельных изделий от вибропреобразователей (короткое замыкание или обрыв), которое устанавливается по постоянному сигналу на выходе коммутатора и коду управления блоком автонормирования. Кроме того, с целью повышения точности производится цифровое управление блоком ФВЧ и обрабатывается информация о работе оборудования (машин).
Качественные характеристики устройства могут быть расширены за счет изменения состава связей. С целью упрощения устройства блок автонормирования может быть не соединен с входом блока ввода-вывода, а вход блока регистрации информации об экстремумах сигнала может быть соединен с выходом детектора среднего абсолютного значения.
На чертеже изображена структурная схема предлагаемого сенсора.
Сенсор диагностики узлов трения качения содержит последовательно соединенные вибропреобразователи 1, коммутатор 2 с встроенным предусилителем заряда, заграждающий фильтр 3 напряжения силовой сети и блок 4 автонормирования, ФВЧ 5, блок 6 АЧХ, пиковый детектор 7, второй коммутатор 8 с совмещенными масштабными усилителями, блок 9 АЦП, блок 10 ввода-вывода и микропроцессорный блок 11 обработки. Сенсор также содержит соединенные с выходом блока 6 АЧХ блок 12 регистрации информации об экстремумах сигнала, выходом соединенный с входом блока 10 ввода-вывода, и последовательно соединенные детектор 13 среднего абсолютного значения и ФНЧ 14, выходом соединенный с четвертым входом второго коммутатора 8. Кроме того, сенсор, содержит блок 15 индикации, блок 16 связи по сети и блок 17 управления, входами соединенные с входом микропроцессорного блока 11 обработки, блок 18 микропереключателей количества задействованных каналов и порядкового номера сенсора и блок 19 сигнализации о работе оборудования, соединенные с входом блока 10 ввода-вывода, первый 20 и второй 21 детекторы уровня сигнала, соединенные входами соответственно с выходом блока 4 автонормирования и выходом ФВЧ 5, выходами соединенные соответственно с вторым и третьим входами второго коммутатора 6, второй ФНЧ 22, включенный между выходом коммутатора 2 и пятым входом второго коммутатора 8, блок 23 источников опорных напряжений, выходом соединенный с шестым входом второго коммутатора 8.
При этом вход блока 10 ввода-вывода соединен с управляющими входами коммутатора 2, блока 4 автонормирования, ФВЧ 5, пикового детектора 7 и второго коммутатора 8.
Устройство работает следующим образом.
Электрический сигнал вибропреобразователей 1, закрепленных на контролируемых узлах трения качения, проходит коммутатор 2 с встроенным предусилителем заряда, заграждающий фильтр 3 напряжения силовой сети, блок 4 автонормирования, ФВЧ 5, блок 6 АЧХ, пиковый детектор 7, второй коммутатор 8, блок 9 АЦП, блок 10 ввода-вывода и в виде цифрового кода степени разрушения подшипников поступает в микропроцессорный блок 11 обработки, блок 15 индикации и блок 16 связи по сети. При этом блок 17 управления управляет работой микропроцессорного блока 11 обработки, последний через блок 10 ввода-вывода синхронизирует работу блока 4 автонормирования, ФВЧ 5, пикового детектора 7, второго коммутатора 8 и блока 9 АЦП. Далее информативный сигнал с выхода блока 6 АЧХ проходит в блок 12 регистрации информации от экстремумах сигнала и в виде кодов распределения толщины слоя смазки поступает через блок 10 ввода-вывода в микропроцессорный блок 11 обработки, где обрабатывается, и передается в сеть ЭВМ (не показано).
Кроме того, информативный сигнал блока 6 АЧХ проходит детектор 13 среднего абсолютного значения, ФНЧ 14 и поступает на четвертый вход второго коммутатора 8 для завершения преобразователя Гильберта в блоке 9 АЦП, дающего через блок 10 ввода-вывода информацию в микропроцессорный блок 11 обработки о периодичности ударных импульсов, что позволяет выявить принадлежность дефектов к определенному элементу подшипника качения и степень опасности разрушения. Одновременно сигнал вибрации с выхода блока 4 автонормирования проходит первый детектор 20 уровня сигнала, второй коммутатор 8, блок 9 АЦП и блок 10 ввода-вывода, что позволяет установить режим работы блока 4 автонормирования управляющими кодами микропроцессорного блока 11 обработки через блок 10 ввода-вывода. Кроме того, микропроцессорный блок 11 обработки считывает через блок 10 ввода-вывода состояние блока 18 микропереключателей количества задействованных каналов и порядкового номера сенсора и блока 19 сигнализации о работе оборудования, что позволяет ему инициализировать коммутатор 2, ФВЧ 5, второй коммутатор 8 и установить режим работы ФВЧ 5, пикового детектора 7.
Далее, информация о состоянии потенциала коммутатора 2 через второй детектор 21 уровня сигнала и второй коммутатор 8, блок 9 АЦП, блок 10 ввода-вывода сигнализирует микропроцессорному блоку 11 обработки о наличии короткого замыкания в коммутаторе 2. Для проверки блока 9 АЦП через второй коммутатор 8 подаются заданные потенциалы, что позволяет микропроцессорному блоку 11 через блок 10 ввода-вывода проверять работоспособность блока 9 АЦП.
Второй детектор 21 уровня сигнала позволяет через второй коммутатор 8, блок 9 АЦП, блок 10 ввода-вывода микропроцессорному блоку 11 обработки установить рабочий режим ФВЧ 5, что повышает точность обработки сигнала вибрации.
Предлагаемый сенсор обеспечивает регистрацию степени повреждений, состояния толщины смазки в зоне нагружения подшипников и принадлежности дефектов к определенному элементу подшипников, кроме того, повышает надежность диагностики за счет введения режимов "самоконтроля".
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕНСОР ДЛЯ КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ ПОДШИПНИКОВ КАЧЕНИЯ | 1992 |
|
RU2036454C1 |
| Устройство для прогнозирования ресурса подшипников качения | 1987 |
|
SU1425507A1 |
| Устройство для вибрационной диагностики остаточного ресурса подшипников качения | 1985 |
|
SU1295262A1 |
| Устройство для контроля состояния узлов трения качения | 1987 |
|
SU1423934A1 |
| Устройство для виброконтроля состояния подшипников | 1989 |
|
SU1633308A1 |
| МИКРОПРОЦЕССОРНЫЙ ВИБРОМЕТР | 1995 |
|
RU2098777C1 |
| СПОСОБ ДИАГНОСТИКИ ПОДШИПНИКОВ КАЧЕНИЯ ЗАХАРОВА - MDZ | 1996 |
|
RU2133455C1 |
| СПОСОБ ДИАГНОСТИКИ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2133454C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2146806C1 |
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1987 |
|
SU1418590A1 |
Использование: при испытаниях подшипников качения. Электрический сигнал вибропреобразователей 1, закрепленных на узлах трения качения, проходит блок 4 автонормирования, ФВЧ 5, блок 6 АЧХ, пиковый детектор 7, блок 12 регистрации информации об экстремумах сигнала, детектор 13 среднего абсолютного значения, ФНЧ 14 и через второй коммутатор 8, блок 9 АЦП, блок 10 ввода-вывода поступает в микропроцессорный блок 11 обработки. Последний индицирует и транслирует цифровые данные о степени разрушения, распределении толщины смазки в зоне нарушения и принадлежности дефектов к определенному элементу подшипника в блок 15 индикации и сеть ЭВМ. Кроме того, электрический сигнал вибропреобразователей 1 проходит детекторы 20 и 21 уровня сигнала, второй ФНЧ 22, что обеспечивает самоконтроль работоспособности устройства. 2 з.п. ф-лы, 1 ил.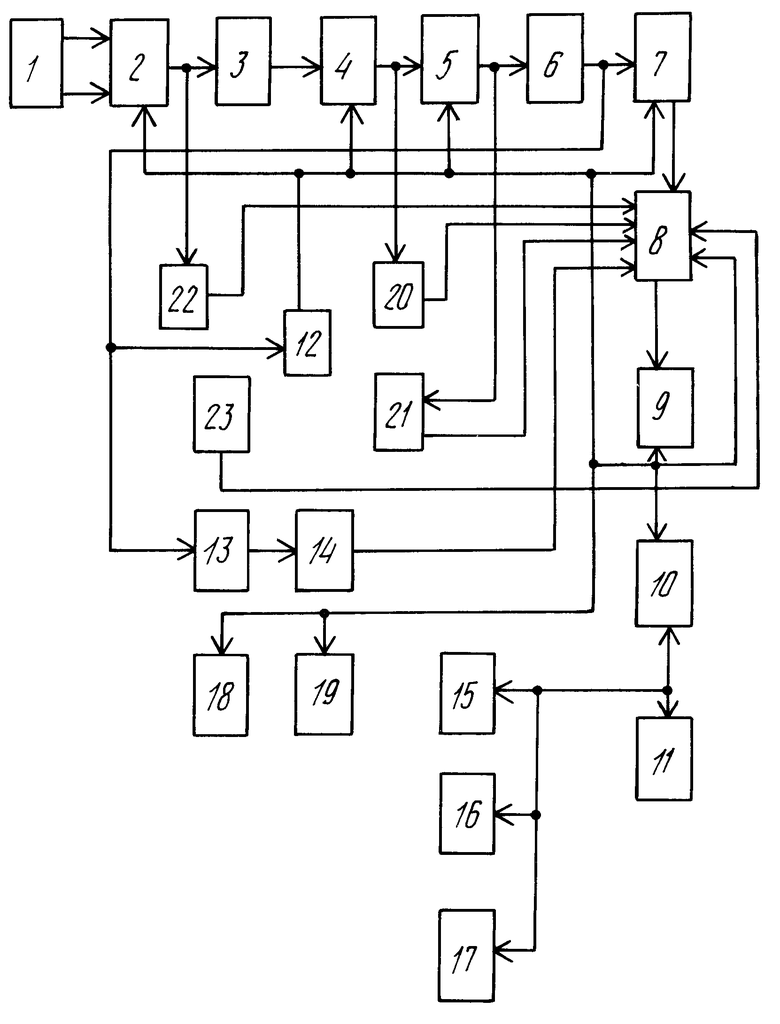
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для прогнозирования ресурса подшипников качения | 1987 |
|
SU1425507A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
