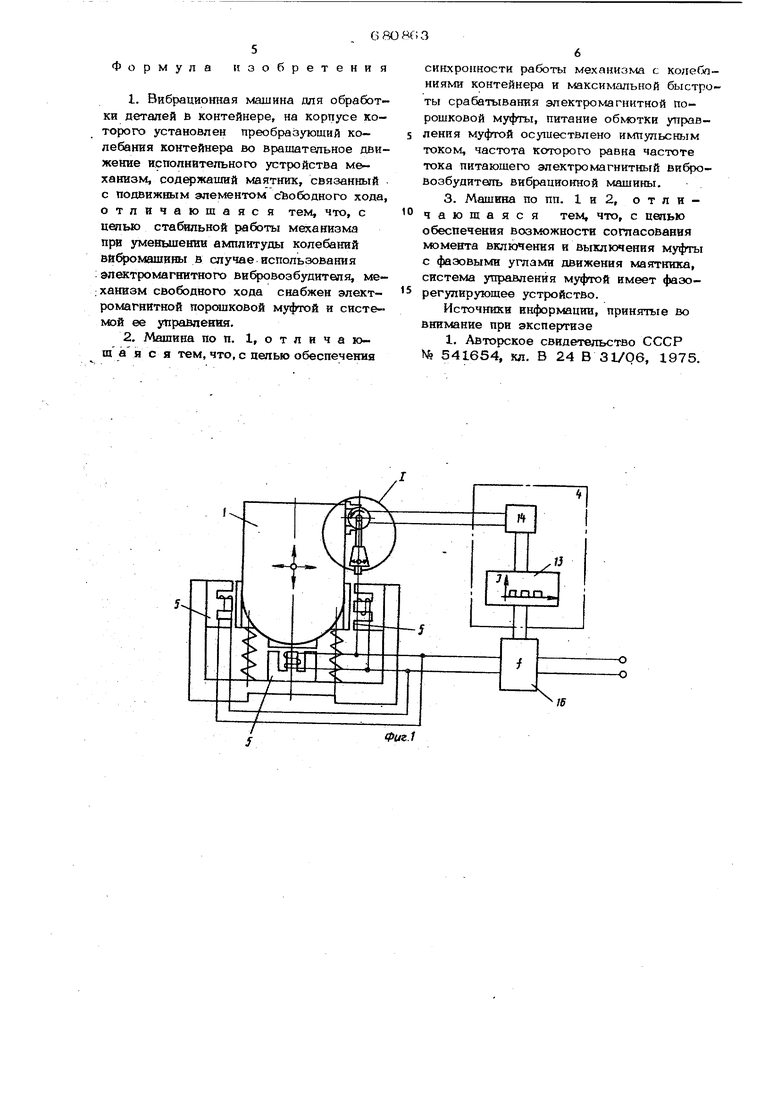
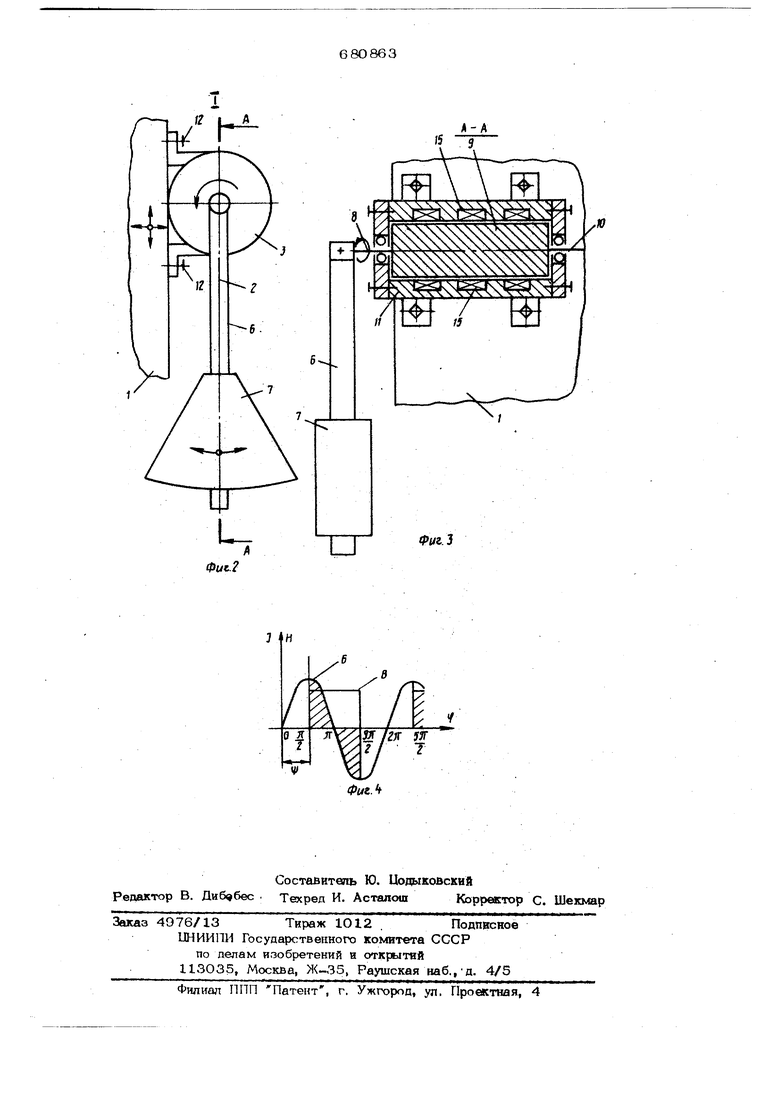
установлен наконтейнере 1 вибранионкой машины и состоит из ведущего маятвика 2, эпектромагнитной порошковой муфты 3 и системы 4 управления муфтой. Вибрационная машина содержит эпектромагнитный., вибровозбудитеггь 5. Ведущий маятник 2 состоит из рычага б и массы 7, стопор$пцейся на рычаге 6 в требуемом положении. Рычаг 6 ведущего маятника 2 жестко закреплен на входном валу 8 электромагнитной порош ковоймуфты 3. Вал 8 жестко соединен с подвижным элементом 9 муфты 3, который жестко соединен с выходным валом 1О механизма для преобр)азования колебательного движения во врашательно Выходной вал Ю связан с исполнительным приспособлением (на чертежах не показан). Неподвижный элемент 11 электромагнитной муфты 3 жестко крепится болтами 12 к контейнеру вибрационной машины. Система 4 управления эпектромагнитной муфтой содержит устро ство 13 для формирования прямоугольных импульсов тока управления муфтой 3 фазорегулируюшее устройство 14 и обмотки 15 управления электромагнитной порошковой муфтой. Муфта 3 и система 4 управления муфтой образуют механизм свободного хода. Питание электромагнитного вибровозбудителя и системы управления электромагнитной порошковой муфтой осуществляется от блока 16 питания. Механизм для преобразования колебательного дЬиЖения во вращательное работает следующим образом. Включают вибратор 5. Возмущающее усилие, создаваемое вибрато ром, приводит вибрационное устройство в колебательное движение. Механизм для преобразования колебательного движения во вращательное за счет жесткого соединения болтами 12 с контейнером 1 также приходит в колебательное движение. В результате колебаний механизма ведущий маятник, жестко связанный с подвижным элементом 9 муфты 3, приобретает возвратно-чсолебательное движение относительно вала муфты по дуге окружности Колебания ведущего маятника носят синусоидалгьный характер, ключают систему управления электромагнитной порошковой муфтой. Поворот ведущего маятника против часовой стрелки передается через входной вал 8 подвижному элементу 9 муфты 3, а он передает движение жестко связанному с: ним выходному ва- лу 10. Указанное движение происходит при изменении фазового угла Ч колебаний ведущего маятника от О до ---. По достижении ведущим маятником крайнего правого положения (- ) происходит замыкание электромагнитной порошковой муфты, что препятствует движению ведущего маятника в обратном о направлении. При изменении угла f от 5 ° % УФТЭ находится в замкнутом состоянии, и ведущий маятник неподвижен. При Ч г происходит размыкание: электромагнитной порошковой муфты, а кинематически возбуждаемый ведущий маятник, подчиняясь законам колебаний, начинает двигаться против хода часовой стрелки по дуге окружности. Указанное движение через Входной вал 8 и подвижный элемент 9 передается выходному еалу 1О что происходит при изменении фазового угла Уг до 2П. При Изменении фазового угла Ч от 241 ао со описанный цикл движения повторяется. Таким образом, последовательные импульсы вращательного даижения передаются Выходному валу 1О. Согласованные по фазе импульсы тока 3 подаются в обмотки 15 управления муфты 3 системой управления, которая ботает следующим образом. Электромагнитный - вибровозбудитель 5и систему управления питают импульсным током 3 с частотой f от блока питания. Подаваемые импульсы в устройстве 13 преобразуются в прямоугольные импульсы тока 3 с частотой . Фаза подачи импульсов в обмотку муфты регулируется фазорегулируюшим устройством 14. Для описанного цикла движения н принятого направления движения выходного вала угол сдвига фаз между колебаниями кинекштически возбуждаемого ведущего маятника и моментом подачи импульса тока в обмотки 15 управления равен Ч а (фиг. 4). Для реверсирования врашения выходного вала 1О угол Ч с помощью фазорегулирутошего устройства 14 доводят до , Кэлебания кинематически возбуждаемого ведущего маятника настраивают перемещением массы 7 по рычйгу 6с последующей фиксацией массы 7 & требуемом положении. Предлагаемая машина позволит механизировать И автоматизировать процессы вибрационной обработки деталей.
Формула изобретения
1.Вибрационная 4aцlннa для обработки деталей в контейнере, на корпусе которого установлен преобразующий колебания контейнера во вращательное движение исполнительного устройства механизм, содержащий маятник, связанный
с подвижным элементом свободного хода, отличаюшаяся тем, что, с целью стабильной работы механизма при уменьшении амплитуды колебаний вйбромашинь в случае-использования ; электромагнитного вифовозбудителя, механизм свободного хода снабжен электромагнитной порсаиковой муфтой и системой ее управления.
2.Машина по п. 1, о т л и ч а ющ а я с я тем, что, с цепью обеспечения
синхронности работы механизма с колебаниями контейнера и максиккшьной быстроты срабатывания электромагнитной порошковой муфты, питание обмотки управления муфтой осуществлено импульсным током, частота которого равна частоте тока питающего электромагнитный вибровозбудитепь вибрационной машины.
3. Машина по пп. Хи2, отличаюшаяся тем, что, с целью обеспечения возможности согласования момента включения и выключения муфты с фазовыми углами движения маятника, система управления муфтой имеет фаэорегулируюшее устройство.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 541654, кл. В 24 В 31/06, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный электродвигатель | 1986 |
|
SU1418861A1 |
| Вибрационная машина для обработки в контейнере деталей | 1977 |
|
SU707781A1 |
| Электропневматический преобразователь | 1988 |
|
SU1550233A1 |
| Нагружатель | 1980 |
|
SU924537A1 |
| Вибромашина для вибрационной обработки деталей | 1980 |
|
SU933401A1 |
| Устройство с колебательно-вращательнымдВижЕНиЕМ | 1979 |
|
SU832658A1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2401503C1 |
| Станок для намотки обмоток электрических катушек | 1980 |
|
SU1023418A1 |
| ИЗМЕЛЬЧИТЕЛЬ ЛИСТОСТЕБЕЛЬНЫХ КОРМОВ | 2011 |
|
RU2473391C1 |
| ПОПЛАВКОВАЯ ВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 1993 |
|
RU2016227C1 |
№
Фиг.1
U
Й
/
Фиг. 3
V
