00 СХ)
00
СП
Изобретение относится к электротехнике, а именно к автоматическому управлению и регулированию возбуждением синхронного генератора, и может быть использовано для повышения динамической устойчив(кти электрических систем.
Цель изобретения - повышение динамической устойчивости и уменьшение длительности переходного процесса.
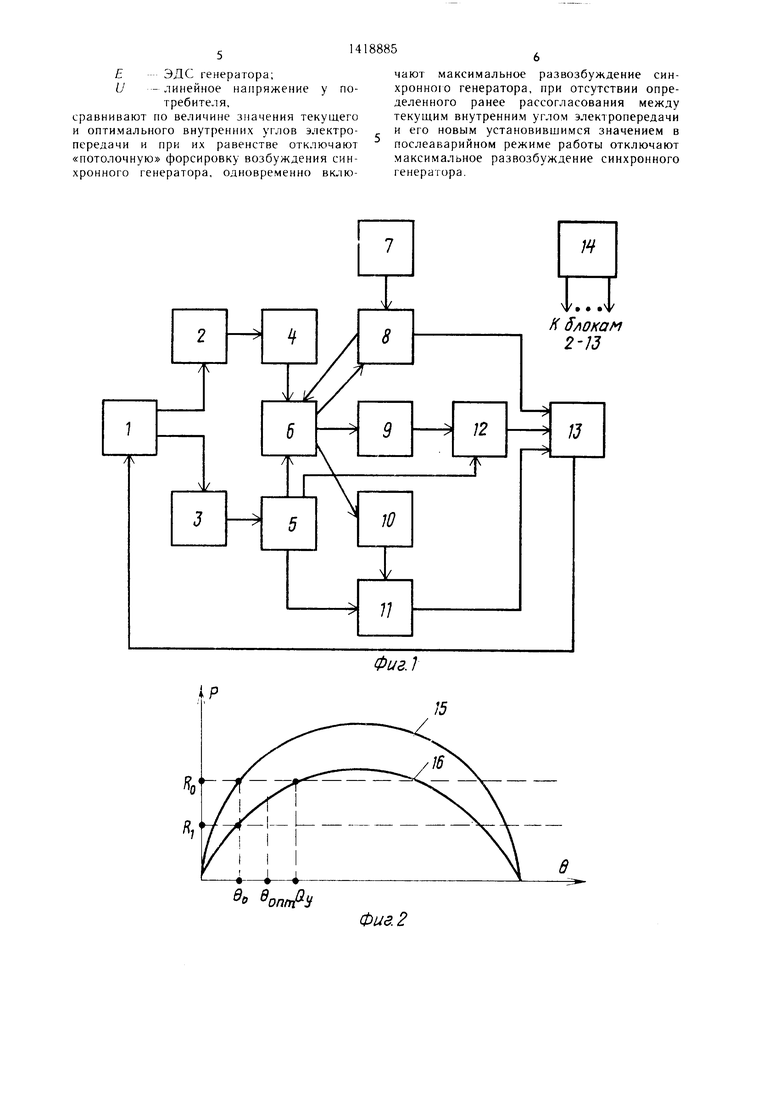
На фиг. 1 представлена блок-схема устройства для реализации способа; на фиг. 2 и 3 - эпюры, поясняющие работу устройства.
Устройство содержит синхронный генератор 1, блок 2 измерения мощности, блок 3 измерения угла, блок 4 хранения значений мощности, блок 5 хране ия значений углов, блок 6 вычислений, блок 7 хранения пороговых значений монхности, блок 8 сравнения моп1ностей, блок 9 хранения юслеаварийных установившихся значений углов, блок 10 хранения оптимальных углов электропередачи, первый блок 11 сравнения углов, второй блок 12 сравнения уг.юв, блок К5 управления возбуждением и синхронизатор 14.
Способ осуществляют следуюпшм образом.
Пусть синхронный генератор работает в нормальном режиме (кривая JS, фи1 . 21, при этом отдаваемой генератором мощности РО соответствует внутренний угол электропередачи Hi. Значение отдаваемой .мощности измеряется блоком 2 и хранится в блоке 4, а значение текущего внутреннего угла электропередачи (-)т измеряется блоком 3 и хранится в блоке 5. Указанные измерения моп1ности и угла осуществляк1тся периодически с периодом Т., благодаря че.му содержимое 6,io ков 4 и 5 непрерывно обновляется. При этом в блоке 4 хранятся как последний (/-ю цикла), так и 1 редыдущий ((/--l)-i o цикла) результаты из.мерения мощности
Измеренные значения мощностей и уг.юв с периодом 7 ;1 посту 1ают в блок 6 вычислений. В c.iy lac возникновения аварии .мощность, отдаваемая reiiefiaTopoM, скачком уменьшается до значения Р (криная 16 фи1 . 2). BiMH4HHa скачка MOIUI-OCTI . Р,:-Р рассчитывается в блоке и 1чи; лс- ний. откуда уюступает в б,.;ок 8 сраг.меч.ия мощностей, где сравнивается с }ie-;:)Г .)р1.1м пороговым значением -. OiUiioc ги /,,,,.. :сли ,,,,, то данный скачок .мощности за период 7|1 принимается за допустимое колебание мощности и ф:,кт аварии региетри рустся. Если ,пр, то фиксир Х Т я факт аварии. В этом случае из 6.iOKa 8 в блок 13 управления возбуждением поступает команда Потолочная форсировка, что обеспечивает максимально допусгям(;е увеличение MOUiHocTH синхронного генератора. В синхронном генераторе и в пе. юм в электрической системе возникает переходный процесс, в результате начинают увеличиваться внутренний угол передачи и значение отдаваемой мощности. В c.;iy4ae факта
аварии из блока 8 в блок 6 юетупает сигнал, но которому в последнем рассчитываются значения оптимального внутреннего в,«,т и послеаварийного установившегося By углов электропередачи в соответствии с выражениями
(|-г((-)у -Н,|)/2; Bj,arcsin(P,i.;(i/.(7);
10
А-..
Я, ,
ц
0
5
0
3
11
S
O
где HI,
В,,,
РО и Р:
Ч
/;
А 4
значение внутреннего угла электропередачи в доаварий- ном режиме;
значение внутреннего угла электронередачи в послеава- рийном режиме; значения отдаваемой мощности синхронного 1 енератора в предаварийном и послеава- рийном режимах работы; соответственно суммарные реактивные сопротивления электропередачи от синхронного генератора до потребителя до и после аварии; ЭДС генератора; линейное напряжеиие у потребите; я.
Рассчитанное значение Н,,п,.„ из б.юка 6 юступает в блок И), где хранится в течение всего переходпсхч) процесса после аварии. 11е)еходный процесс считается законченным гогда, когда мощность, отдаваемая генера- гором после аварии, становится практически равной мощности генератора в доаварийно.м режиме. Значение В,, из блока 6 поступает в блок 9, где также хранится в течение всего переходного процесса. В б.чоке 11 производится сравнение значений углов В„ат и B,j, поступающих соответственно из блоков К) и 5. При выполнении условия В,В„лт из блока 11 в блок 13 поступает команда cHM;i. развозбуждение, по которой о к,1К)чаегся режим «Потолочиая форсир(зв- ка. и обеспечивается максимально допус- :имое торможение синхронного генератора, этом режп.ме синхронный генератор нахоВ
дигся до lex пор, пока не будет выполняться у::ловие Нт---Н„.
На второй блок 12 сравнения поступают величина Н, пз блока ,5 и величина Н„ из б,1ока 9, и при равенстве этих величин с блока 12 в блок 13 поступает комапда «.Отмена максимального развозбужде)1ия. Синхронный |1 нератор переходит в послеава- рий ный режим работы при некотором новом внутреннем yi-ле пе()едачи В,,. Отдаваемая мощность достигает прежнего значения Рп. (-инхронизатор 14 согласует работу всего устройства во времени путем подачи на блоки 2 13 управляющих (синхронизирующих) ci;i na,iOB.
Предлагаемый способ базируется на основах теории оптималных автоматических систем. Система управления, обеспечивающая минимальное время переходного процесса, должна быть оптимальной но быстродействию. Если у автоматической системы при отработке задающего воздействия ЛЯ располагае.мые ускорения равны W,., то для получения минимального времени переходного процесса необходимо вначале с макси- .мальным ускорение.м отрабатывать рассо-- гласование, а затем в некоторой точке изменить знак ускорения, г. е. затормозить движение к новому установившемуся положению. .Минимальное время переходного процесса в этом случае составляет
Т
RIP
- v-T.rч
где ЛЯ - скачок отдаваемой мощности, Вт;
WP - максимально допустимая скорость изменения отдаваемой генератором в сеть .мощности, Вт/с .
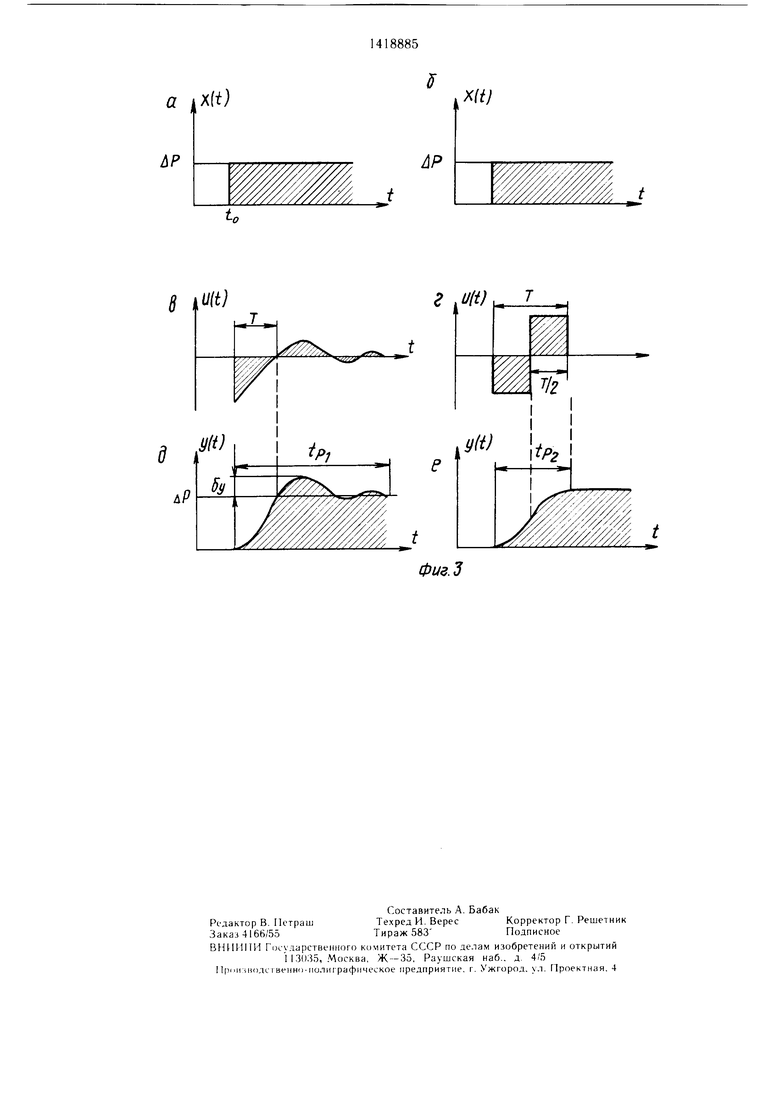
Эпюры (фиг. 3) иллюстрируют сущность предлагаемою способа. Для известного способа является характерным то, что при возникновении задающего воздействия A (/;I в виде скачка по положению ЛЯ формируется управляющее воздействие Uiti. пропорциональное величине и знаку разности x t -//;/), где (/(/) выходная величина обьекта управления (синхронного генератора). Такая организация фор.мирования управляющего воздействия (для так называемых систем, работ; )Щих по отклонению) приводит к iiepept ,л фованию и к медленно затучаю- .лнм ко.чсоаниям относительно нового равновесного но. южения, так как обьект управления имеет значительную инерционность. Для их уменьшения используют корректирующие обратные связи. Однако в системах даже нри числе колебаний 1-3 величина неререгу.жирования 6„ составляет 23 -40%. Предлагаемый способ предполагает нрин- ципиа.льно другую организацию фор.мирова- нин уп 1авляюн1ег о воздействия , в частности на нервом угапе максимально возможное одного знака (максима.пьный разгон), на втором - максимально возможное друго1 о знака (максимальное тор- .можение), причем оба тих этапа прих(.).чятся на интервал времени Т, в пределах которого разность л (/)-(/ /I НС меняет своего знака. Таки.м образом, реа. предлагаемого способа даст возможность ве.личину пере- регул ;рования практически свести к ну. Ш) и значителыю сократить длительность псре- ходно1Ч1 процесса (/,,,I ). Отсутствие перерегулирования позволяет зпачительно повысить динамическую устойчивость электрических систем, приблизив ее к потенциа,1Ь- но возможной. Для обеспечения требуемой точности при реализации предлагаемого способа необходимо выполнение условия ,017,
0
5
0
5
0
5
0
т. е. период текущих измерении мощности и углов должен быть на два и более порядков меныне длительности переходного нроцееса. Значения А , Е. U, Яц, Нц, соответствующи нормальному режиму, рассчитываются зара нее и MorvT быть введены предварите.шно в систему в качестве констант.
Таким образо.м, изобретение позво, 1Яет повысить динамическую устойчивость и уменьшить длительность переходного процесса в э,1ектрических систе.мах.
Формула ч: опрег1. ни.ч
Способ автоматического аварийного управления возбуждением синхронного генератора, при когорох измерярот текущий внутренний угол электропередачи, регистрируют факт аварии, определяют по характеру аварии значе}1ие новог о установившегося внутреннего угла электропередачи, определяют рассогласование между текущим внутренним углом электропередачи и его новым установившимся значением, управляют возбуждением синхронного генератора в соответствии с величиной и знако.м данного рассогласования, отличающийся тем, что, с целью повышения динамической устойчивости и умены1;ечия длительности переходного процесса, измеряют отдаваемую .мощность синхронного генератора в предаварийном и аварийном режимах работы, определяют величину изменения данной мощности и сравнивают данную величину с заданны.ч для данного синхронного генератора пороговым значением, при превышении которого включают «потолочную форсировку возбуждения синхронного генератора, опреде,1яют оптимальный внутренний угол (-),„,„ электропередачи по выражениям
в,„,„ (-)„-;-((-),, -В.,)/2; В„ агс51п(Я„-.(1 )(/;
Х,Х,:
Р
LS Р
Я, Я,.-ЛЯ,
5
0
5
где Ни Н.,
Я„, Я;
значение внутреннего угла электропередачи в доаварий- ном режиме:
значение внутреннего э.чектропередачи в послеава рийпом режиме; значения отдаваемой мощности синхронного генератора в предаварийном и послеава- рийном режимах работы; соответствепно суммарные реактивные сопротивления э,1ектропередачи от синхронного генератора до потребителя до и после аварии;
ЕЭДС генератора;
и - линейное напряжение у потребителя,
сравнивают по величине значения текущего и оптимального внутренних углов электропередачи и при их равенстве отключают «потолочную форсировку возбуждения синхронного генератора, одновременно включают максимальное развозбуждение синхронного генератора, при отсутствии определенного ранее рассогласования между текуш.им внутренним углом электропередачи и его новым установившимся значением в послеаварийном режиме работы отключают максимальное развозбуждение синхронного генератора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления возбуждением синхронного генератора с двумя обмотками на роторе в послеаварийном режиме | 1977 |
|
SU698108A2 |
| Способ регулирования возбуждения генератора при работе его через дальнюю линию электропередачи | 1956 |
|
SU106846A1 |
| Способ противоаварийного управления гидроэлектростанцией | 1990 |
|
SU1771032A1 |
| СИСТЕМА МОНИТОРИНГА АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ ВОЗБУЖДЕНИЯ И СИСТЕМ ВОЗБУЖДЕНИЯ ГЕНЕРАТОРОВ ЭЛЕКТРОСТАНЦИИ | 2013 |
|
RU2509333C1 |
| Способ автоматического управления возбуждением синхронного генератора с двумя обмотками на роторе в послеаварийном режиме | 1976 |
|
SU657563A1 |
| Способ противоаварийного управления режимом параллельной работы синхронных генераторов и делительной автоматики в электрических сетях | 2018 |
|
RU2692054C1 |
| СПОСОБ УЛУЧШЕНИЯ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ И ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339144C1 |
| Способ автоматического аварийного управления напряжением на кольцах ротора электрической машины переменного тока | 1972 |
|
SU439053A1 |
| Способ автоматического аварийного управления возбуждением синхронного генератора | 1978 |
|
SU741401A1 |
| Устройство для управления возбуждением синхронного генератора в распределительной сети переменного тока | 2023 |
|
RU2802730C1 |
И.чобретение относится к автоматическому управлению и регулированию возбуждением син.хронног о генератора. Цель изобретения - повьииение дина.мической устойчивости и у.меньи1ение длительности пере- .ходного процесса при авариях. Способ содержит следующую последовательность операций: измерение отдаваемой генератором мощности и внутреннего угла :)лектропере- дачи в нормальном режиме и их запоминание: регистрация факта аварии; измерение скачка отдаваемой мощности; включение режима «Потолочная форсировка синхронного генератора; измерение текущего внутреннего угла электропередачи; расчет значений оптимального и нового установившегося внутренних углов электропередачи и и.х запоминание; сравнение по ве,личине значений текущего и оптимального внутренних углов электропередачи и при их равенстве отмена режима «Потолочная форсировка и включение режима «Максимальное торможение ; сравнение по величине значений текущего и ранее рассчитанного нового установившегося внутренних углов электропередачи и при их равенстве отмена режима «.Максимальное торможение и переход к установившемуся послеаварийному режиму работы. Способ позволяет повысить динамическую устойчивость электрических систем и, как следствие, уменьшить вероятность перерыва электроснабжения потребителей. 3 ил. сл
0 оппРу
14
ф. .ф
f( блокам 2-/J
Фиг. Т
15
Фиг. 2
а iXft)
ЛР
8 1
-7
д
x(t)
АР
Фиг.д
| Способ автоматического аварийного управления возбуждением синхронной машины | 1975 |
|
SU573845A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидете | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
