зГ1
Ш
(Л
раллелограммнын механизм 3 вьшолнен в виде вертикальных и горизонтальных стержней 5,6, шарнирно соединенных между собой. К вертикальным стержням 5 жестко прикреплены кронштейны 7. На кронштейнах 7 в направляющих установлены ползуны 8, к которым прикреплены П-образные рамки 9. Па- раллелограммный механизм 3 средней частью горизонтальных стержней по- средством шарниров 12 прикреплен к вертикальной оси 13. Пневмоцилиндр 19 жестко прикреплен к вертикальной штанге 18, его стержень соединен с
горизонтальной телескопической штангой 15. Пневмоцилиндр 19 снабжен регулятором вакуума 22. Проворачивая на шарнирах 11-относительно П-образ- ных рамок 9 и перемещая ползуны Sj устанавливают рабочие органы 1,2 на размер вымени. Поворачивая параллелограммный механизм вокруг оси 13, ориентируют рабочие органы 1,2 и одновременно изменяют длину телескопической штанги 15. С помощью регулятора вакуума 22 прижимают рабочие органы 1,2 к вымени. 3 з.п. ф-лы, 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для массажа вымени | 1990 |
|
SU1717020A1 |
| Устройство для массажа вымени | 1981 |
|
SU933055A1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА ВЫМЕНИ НЕТЕЛЕЙ | 2003 |
|
RU2258357C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ЛИНЕЙНОЙ ДОИЛЬНОЙ УСТАНОВКИ | 1999 |
|
RU2151499C1 |
| Манипулятор доильной установки | 1988 |
|
SU1634193A1 |
| Переносной манипулятор доения коров | 2023 |
|
RU2801542C1 |
| АВТОМАТИЗИРОВАННАЯ ДОИЛЬНАЯ УСТАНОВКА | 2003 |
|
RU2244417C2 |
| МОБИЛЬНЫЙ АВТОМАТ ДОЕНИЯ КОРОВ | 2000 |
|
RU2189737C2 |
| Способ подготовки нетелей к лактации и устройство для его осуществления | 1990 |
|
SU1759341A1 |
| Устройство для преддоильной обработки вымени и доения животных | 1986 |
|
SU1349735A1 |

Изобретение относится к сельскому хозяйству. Цель изобретения - упрощение эксплуатации устройства и повышение эффективности массажа. Устройство для массажа вымени содержит рабочие органы 1 для передних долей вымени, рабочий орган 2 для задних долей вымени. Рабочие органы установлены на манипуляторе 4 с помощью параллелограммного механизма 3. Па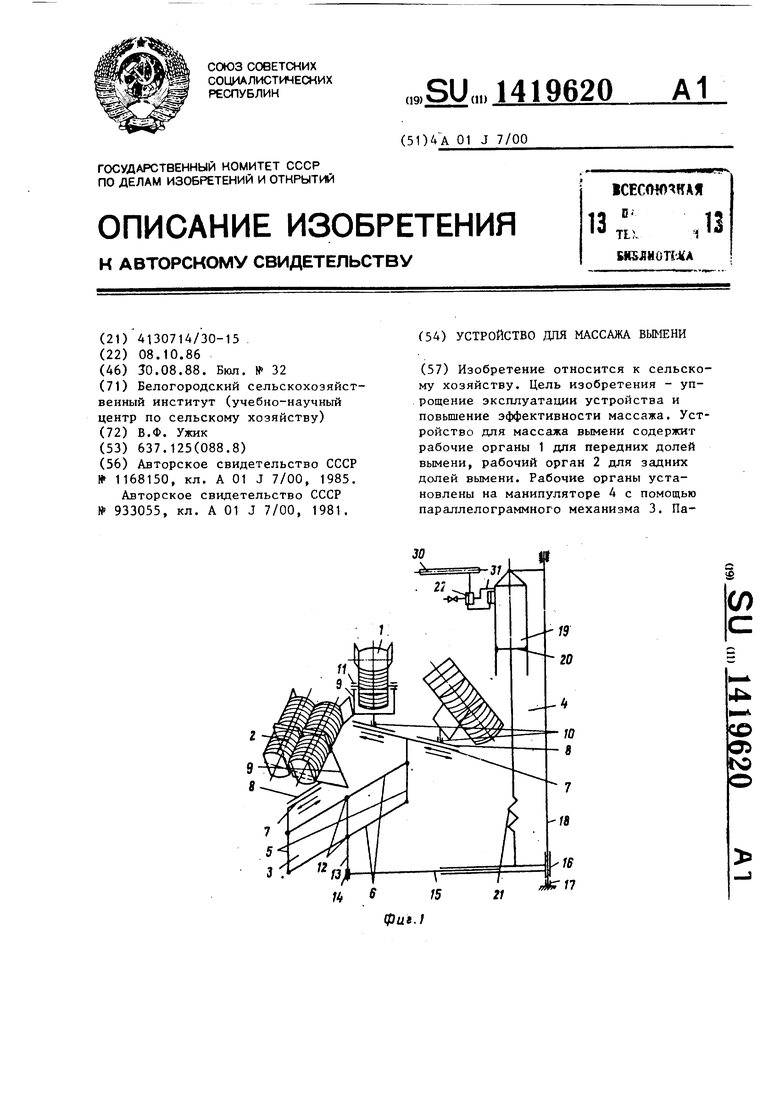
1 Изобретение относится к сельскому
хозяйству, в частности к устройствам для массажа вымени.
Цель изобретения - упрощение эксплуатации устройства и повьппение эф- фективности массажа.
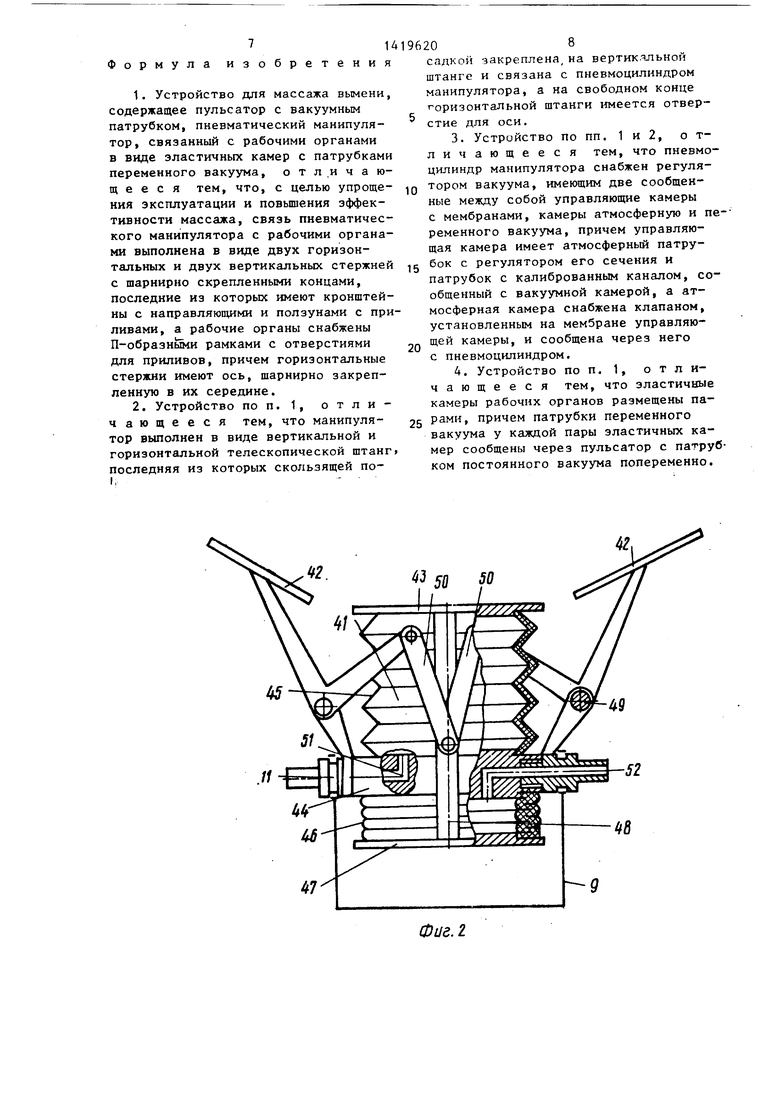
На фиг. 1 приведена схема устройства для массажа вымени; на фиг. 2- рабочий орган для массажа передних долей.вымени; на фиг. 3 - рабочий орган для массажа задних долей вымени; на фиг. 4 - схема регулятора вакуума.
Устройство для массажа вымени со- держит рабочие органы 1 для передних долей вымени, рабочий орган задних долей вымени, параллелограммный механизм 3, манипулятор 4. Параллелограммный механизм 3 вьтолнен в виде вертикальных 5 и горизонтальных 6 стержней, шарнирно соединенных между собой. К вертикальным стержням 5 жестко прикреплены кр онштейны 7. На кронштейнах 7 в направляющих установлены ползуны 8, к которым прикрепле- ны П-образные рамки 9 для крепления рабочих органов 1 и 2. Причем П-образные рамки 9 рабочих органов 1 для передних долей вымени прикреплены к ползунам 8 посредством прили- ВОВ 10, позволяющих осуществлять фиксируемый проворот рабочих органов 1 относительно вертикальной оси. П-образные рамки 9 снабжены шарнирами 11
Параллелограммный механизм 3 средней частью горизонтальных стержней 6 посредством шарниров 12 прикреплен к вертикальной оси 13, которая установлена в отверстии 14 телескопической штанги 15 манипулятора 4, с возможностью поворота.
Телескопическая штанга 15 сколь- зяп(ей посадкой 16 прикреплена к свободно вращающейся относительно вертикальной оси на шарнирах 17 вертикальной штанге 18 и имеет возможность перемещаться по ней под воздействием пневмоцилиндра 19. Пневмоцилиндр 19 жестко прикреплен к вертикальной штанге 18, а его поршень 20, посредством эластичного элемента 21 соединен с горизонтальной телескопической штангой 15.
Пневмоцилиндр 19 снабжен регулятором 22 вакуума. Регулятор 22 вакуума выполнен в виде разделенных мембраной 23 камеры 24 переменного вакуума с патрубком 25 и управляющей камеры 26, которая посредством патрука 27 с калиброванным каналом 28 соединена с патрубком 29, соединяющим камеру 24 переменного вакуума с вакуумной магистралью 30. С пневмоци- линдром 19 камера 24 переменного вакуума соединена посредством патрубка 31. Управляющая камера 26 соединена с атмосферой посредством вентиля 32 и атмосферного патрубка 33 с регулятором его сечения 34. Мембрана 35 образует вторую управляющую камеру 36, сообщенную посредством патрубка 37 с управляющей камерой 26 и атмосферную камеру 38, которая отделена от пневмоцилиндра 19 клапаном 39, установленым посредством штока 40 на мембране 35.
Рабочий орган 1 для передних долей вымени содержит сильфон 41, массирующий доли вымени посредством створок А2 и контактной пластины 43. Сильфон 41 выполнен в виде сблокированных по- средством опоры 44 верхней 45 и нижней 46 камер, контактная пластина 43 и крышка 47 которого жестко соединены между собой распоркой 48. Длина распорки 48 выбрана такой, чтобы при Полном сжатии нижней камеры 46 обеспечивался полный рабочий ход верхней камеры 45 и наоборот. Створки 42, посредством шарниров 49 прикрепленные к опоре 44, тягами 50 связаны с распоркой 48.
Верхняя 45 и нижняя 46 камеры соединены соответственно каналами 51 и 52 с различными камерами двухкамерного пульсатора (не показан).
Рабочий орган 2 для задних долей вымени выполнен в виде сблокированньп посредством тройника 53 сильфонов 54 и 55, к опорам 56 и 57 которых посредством шарниров 58 и 59 соответ- ственно прикреплены створки 60 и 61, связанные тягами 62 и 63 с распорками 64 и 65, скрепляющими жестко между собой контактные пластины 66, 67 и крышки 68, 69 соответствующих сильфонов. Контактные пластины 66 и 67 сильфонов 54 и 55 соединены между собой гибкой вставкой 70.
Канал 71 тройн ика 53 соединяет верхнюю камеру 72 сильфона 54 и ниж- нюю камеру 73 сильфона 55 с одной камерой двухкамерного пульсатора, в то время как с другой его камерой посредством каналов 74 и 75 соединены нижняя 76 и верхняя 77 камеры сильфонов 54 и 55 соответственно.
К П-образным рамкам 9 рабочие органы 1 и 2 прикреплены посредством шарниров 11 опорами 44, 56 и 57.
Устройство для массажа вымени ра- ботает следующим образом.
Перед установкой на вымя устройства, проворачивая на шарнирах 11 относительно П-образных рамок 9 и
перемещая ползуны 8 по кронштейнам 7 вертикальных стержней 5, устанавливают рабочие органы 1 и 2 на необходимый размер. Затем рабочие органы 1 и 2 подводят к вымени животного.
Для этого за параллелограммный механизм 3 (фиг. 1) проворачивают манипулятор 4 в направлении вымени. При этом вертикальная Штанга 18 вра5
0
0
5 0
З
0
5
щается относительно вертикальной оси на шарнирах 17. Затем ориентируют рабочие органы 1 и 2, проворачивая параллелограммный механизм с вертикальной оси 13 в отверстии 14 и одновременно изменяя длину телескопической штанги 15. Из вакуумной магистрали 30 по патрубку 29 вакуум подают к регулятору 22 вакуума, где вакуум по патрубку 27 через калиброванный канал 28 проникает в управляющую камеру 6 и по патрубку 26 - в камеру 24 переменного вакуума. Изменяя проходное сечение 34 отверстия изменяют количество воздуха, поступающего в управляющие камеры 26 и 36, тем самым регулируют величину вакуума в управляющих камерах 26 и 36. При этом мембрана 23 изменяет свое положение относительно патрубка 25, изменяя тем самым проходное сечение между мембраной 23 и патрубком 25 и регулируя таким образом вакуум в камере 24 переменного вакуума и в пневмоци- линдрь 19, куда он поступает по патрубку 31. В равновесии мембрана 23 находится при одинаковой величине вакуума в камере 24 переменного вакуума и управляющей камере 26.
Поршень 20 пневмоцилиндра 19, перемещаясь вверх под воздействием вакуума, посредством эластичного эле- MeiiTa 21 перемещает телескопическую штангу 15 на скользящей насадке 16 по вертикальной штанге 18 вверх до прижатия рабочих органов 1 и 2 к долям вымени. При этом параллелограммный механизм 3, проворачиваясь на шарнирах 12 относительно оси 13, обеспечивает прижатие рабочих органов как к передним, так и задним долям. Этим обеспечивается фиксация устройства на вымени животного. Усилие прижатия рабочих органов 1 и 2 к вымени регулируют, изменяя вакуум в пневмоцилиндре 19.
Одновременно из двухкамерного пульсатора поступает переменный вакуум к рабочим органам 1 и 2. При этом, если по каналу 52 рабочего органа 1 вакуум поступает в нижнюю камеру 46 сильфона 41, то верхняя камера 45 соединена с атмосферой. Под воздействием вакуума нижняя камера 46 сжимается, приближая крышку 47 к основанию и посредством распорки 48 удаляя от основания контактную пластину 43, массируя тем самым долю вымени по центру. Верхняя камера
5
45 растягивается. Одновременно усилие от распорки 48 посредством тяг 50 передается створкам 42, которые, проворачиваясь на шарнирах 49 относительно основания, удаляются от доли вымени.
При смене такта в двухтактном пульсаторе по каналу 51 в верхнюю камеру 45 сш1ьфона 41 поступает вакуум, а нижняя камера 46 соединяется с атмосферой. При этом верхняя тсаме- ра 45 сжимается, удаляя контактную пластину 43 от доли вымени, одновременно удаляя крьпику 47 от опоры 44. Усилие сжатия камеры 45 от распорки 48 передается посредством звеньев 50 створкам, которые, проворачиваясь на шарнирах 49 относительно опоры 44 осуществляют массаж доли вымени с боков.
Сильфоны 54 и 55 рабочего органа 2 для за;;них долей вымени работают в противофазе. При подаче вакуума чере канал 71 тройника 53 в верхнюю камеру 72 сильфона 54 и в нижнюю камеру 73 сильфона 55 в нижнюю камеру 76 и верхнюю камеру 77 но каналам 74 и 75 поступает атмосферное давление. Верхняя 72 и нижняя 73 камеры сжимаются, удаляя от опор 56 и 57 крышку 68 и контактную П1 астину 67. При этом контактная Ш1а.стина 67 осуществляет массаж одной доли по центру. В это же время путем сжатия с боков створкой 60 и гибкой вставкой 70 осуществляется массаж другой доли. Усилие сжатия образуется за счет проворота створки 60 на шарнире 58 под воздействием усилия сжатия верхней камеры 72, передаваемого от распорки 64 звеном 62. А створка 61, проворачиваясь на шарнире 59 под воздействием усилия, передаваемого от распорки 65 звеном 63, oTxoAnt от вымени.
При смене такта в двухтактном пульсаторе та доля, которая массировалась по центру контактной пластиной 67, теперь сжимается с боков гибкой вставкой 70 и створкой 61, а доля, которая сжималась с боков створкой 60 и гибкой вставкой 70, теперь массируется по центру контактной пластиной 66.
Так осуществляют массаж вымени животньос. При горизонтальном перемещении животного в станке рабочие органы 1 и 2 (фиг. 1) удерживаются на вымени, проворачиваясь совместно с параллелограммным механизмом 3 в от206
верстии 14 и проворачивая манипулятор 4 на шарнирах 17. При перемещении вымени животного вниз телескопическая штанга 15 под воздействием усилия нажатия вымени на рабочие ор- ганы 1 и 2, перемещается на посадке 16 по стойке 18 ониз. При этом растягивается эластичная вставка 21,
смягчая резкое увеличение усилия прижатия рабочих органов 1 и 2 к вымени животного. Одновременно в пневмоци- линдре 19 за счет перемещения поршня 20 вниз резко возрастает вакуум.
Это вызывает срабатывание регулятора 22 вакуума. Поскольку вакуум в пнзв- моцилиндре 19 становится вьш1е вакуума в управляющей камере 36, величина которого установлена равной величине вакуума в управляющей камере 26, то клапан 39, прогибая гибкую мембрану 35 посредством штока 40, открывается и впускает воздух в пнев- моцилиндр 19 из, камеры 38 атмосфер
25
30
ного давления. В результате вакуум в пневмоцилиндре 19 снижается до величины, равной величине вакуума в управляющей камере 36. Этим обеспечивается стабильное усилие прижатия рабочих органов 1 и 2 к вымени животного.
После завершения массажа открывают вентиль 32 регулятора 22 вакуума. При этом в управляющей камере 26 устанавливается атмосферное давление, которое одновременно по патрубку 3.7 проникает в управляюшую камеру 36. В результате гибкая мембрана 23 регулятора 22 вакуума пpIiжимaeтcя к
патрубку 25, перекрывая доступ вакуума в камеру 24 переменного вакуума, а значит и по патрубку 32 в пневмо- цилиндр 19. Одновременно освобождается гибкая мембрана 35. Под воздействием вакуума в пневмоцилиндре 19 клапан 39, прогибая посредством штока 40 гибкую мембрану 35, открывает доступ воздуха из камеры 38 атмосферного давления в пневмоцилиндр 19. В
результате в пневмоцилиндре 19 устанавливает атмосферное давление. Не удерживаемый вакуумом поршень 20 позволяет опуститься вниз под воздействием собственного веса рабочим органам 1 и 2 (фиг. 1) совместно с па- раллелограммным механизмом 3 и телескопической штангой 15. За паралле- лограммный механизм 3 выводят рабочие органы 1 и 2 из-под вымени.
114
Формула изобретения
0
96208
садкой закреплена, на вертик.гпьной штанге и связана с пневмоцилиндром манипулятора, а на свободном конце горизонтальной штанги имеется отвер- стие для оси.
с мембранами, камеры атмосферную и переменного вакуума, причем управляющая камера имеет атмосферный патрубок с регулятором его сечения и патрубок с калиброванным каналом, сообщенный с вакуумной камерой, а атмосферная камера снабжена клапаном, установленным на мембране управляющей камеры, и сообщена через него с пневмоцилиндром.
5
0
ft8
Фаг. 2
31
(Чя.з
| Устройство для массажа вымени животных | 1984 |
|
SU1168150A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для массажа вымени | 1981 |
|
SU933055A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
