ел
i;r-o6pL: reH)ie относится к измерительной технике и может быть исполь- згуцано для измерения угловых перемещений объектов.
Цель изобретения - повьппение точ- (i путем регулирования чувстви- тель юсти при одновременном обеспечении работоснособнрсти индуктивности в среде повьгшенной влажности.
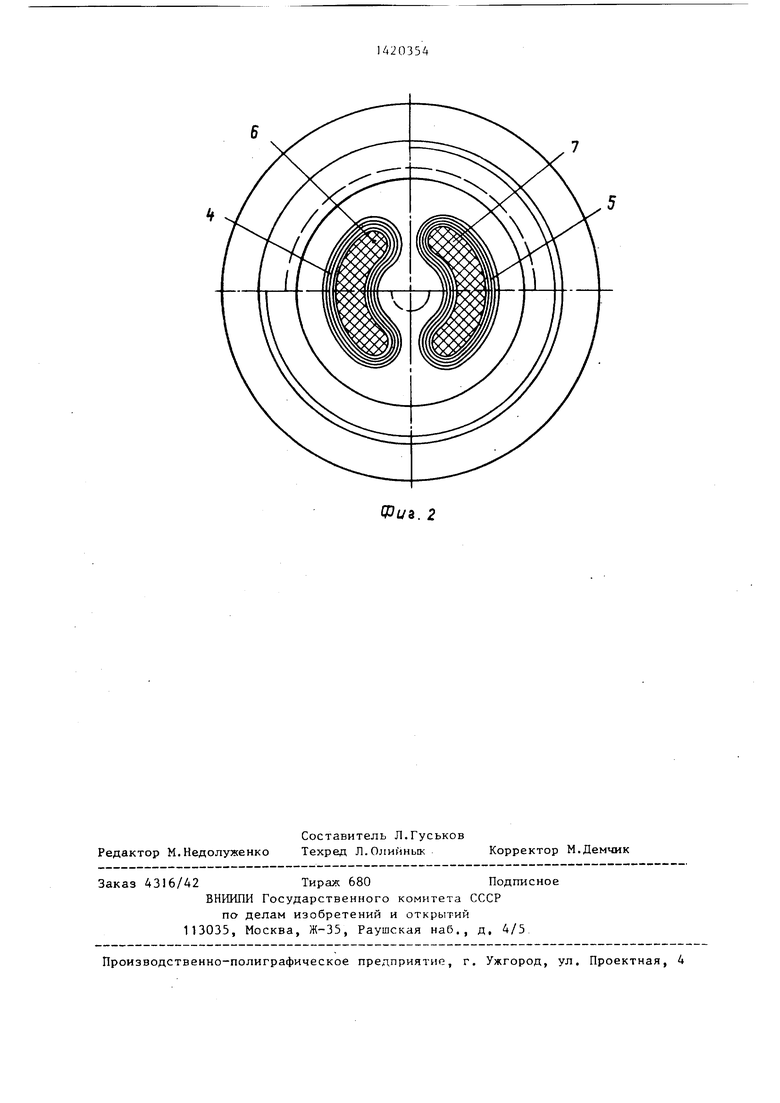
Па фиг.1 показан датчик, общий вид; на фиг.2 сечение А-А.на фиг.1.
Датчик содержит корпус 1, размещенную в нем с возможностью перемещения вдоль продольной оси датчика и фиксации в заданном положении втулку 2 со стопорным винтом 3 и закреплен- ны( но втулке 2 катушки 4 и 5 И1щук- тивности, размещен}1ые на каркасах 6 и 7 из из.ол пшонаого материала, расположенные в общей плоскости по одну сторону от ротора экрана 8. Каркасы 6 и 7 libiHojiHoai ияог 1утыми но дуге окружности, а катушки 4 и 5 залиты Г}удроизолятором, обеспечивающим рабо Т-/ датчика в условиях повышенной влажности. Ферромагнитный ротор-экран 8 имеет форму полудиска и снабжен упорной кромкой 9, контактирующей с выступом 10 корпуса 1. Ротор- зкран 8 имеет шток 11, связанный п;ипопь м )сдн)1ением с валом 2 и подпруж 1 К : ный пружиной 13 относи- TBJTbHo корпуса 1. Вал 12 в процессе измерений связывается с объектом контроля (не показан). Корпус 1 закрыт со cTopo}tbi вала 12 крышкой 14. Катушки А и 5 электрически включены дифференциально, например, в смежные плечи мостовой измерительной схемы.
Датчик работает следующим образом
Вал 12, связываемый в процессе измерений с объектом контроля, осуществляет поворот штока 1 и ротора-экра
0
0
5
резьбой, перемещают ее в необходимое положение, после чего вновь фиксируют втулку 2 с помощью стопорного винта 3. Положение ротора-экрана
8в осевом направлении фиксировано путем поджатия его упорной кромкой
9выступов корпуса с помощью пружины 13. Шиповое соединение штока 11
с валом 12 позволяет исключить влияние осевых люфтов вала на положение ротора-экрана 8 .
Выполнение каркасов 6 и 7 и катушек А и 5 изогнутыми по дуге окружности позволяет обеспечить в широком диапазоне измерений линейную зависимость между площадью перекрытия катушек А и 5 индуктивности ротором-экраном 8 и углом поворота вала 12 в диапазоне угловых перемещений.
Таким образом, за счет регулирования чувствительности, линеаризации выходной характеристики, герметизации катушек индуктивности, исключения влияния осевых люфтов вала на показания датчика повышается точность измерений дифференциального индуктивного датчика угловых перемещений.
25
30 Формула изобретения
Дифференциальный индуктивный датчик угловых перемещений, содержащий пластинчатый ферромагнитный ротор-экран и размещенные на изоляционных каркасах симметрично относительно продольной оси датчика две катушки индуктивности, соединенные дифференциально, отличающийся тем, что, с целью повышения точности путем регулирования чувствительности при одновременном обеспечении работоспособности в среде повышенной влажности, он снабжен установленной с воз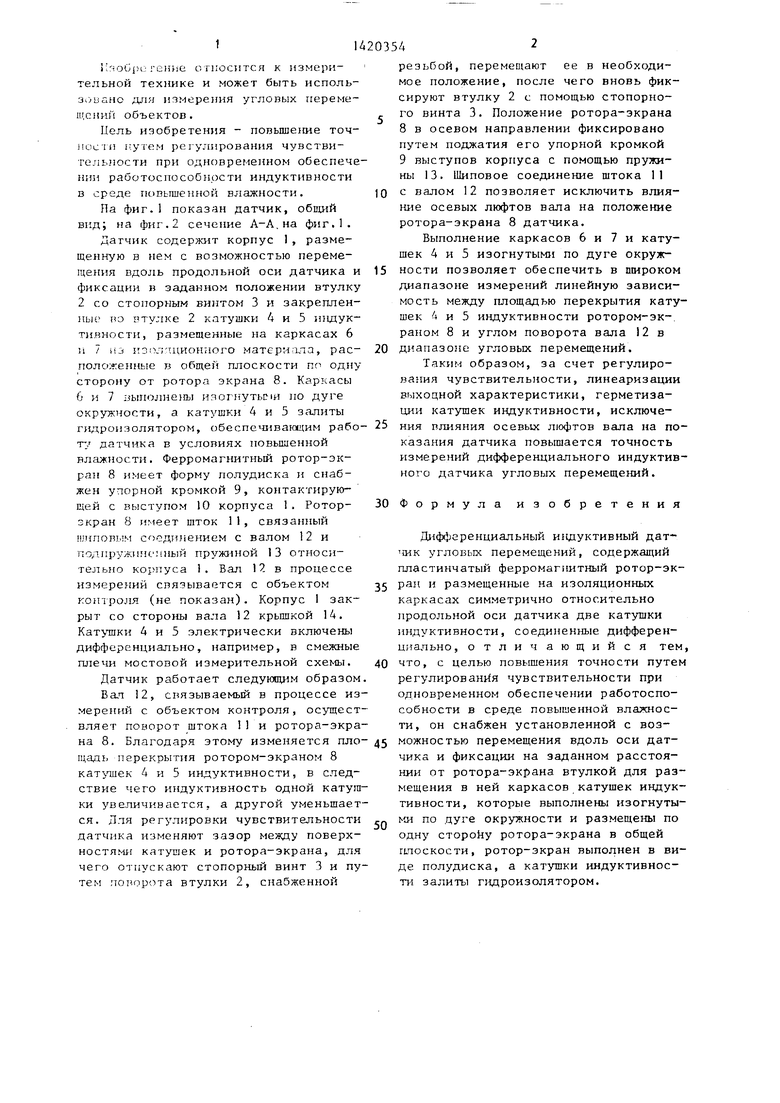
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2480710C2 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 2003 |
|
RU2244274C1 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2000 |
|
RU2180096C2 |
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2298178C1 |
| ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 1999 |
|
RU2165076C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2465605C1 |
| ЧАСТОТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ НЕГО | 2007 |
|
RU2401461C2 |
| ДАТЧИК СКОРОСТИ | 2012 |
|
RU2521716C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231750C2 |
| ДАТЧИК СКОРОСТИ | 2006 |
|
RU2327171C2 |
Изобретение относится к измерительной технике. Цель - повьшение точности дифференциального индуктивного датчика угловых перемещений, содержащего ферромагнитный ротор-экран 8, выполненный в виде полудиска, и установленные на изоляционных каркасах 6 и 7 по одну CTjopoHy от него и изогнутые по дуге окружности катушки 4 и 5 индуктивности, размещенные в общей плоскости. Каркасы 6 и 7 с катушками индуктивности размещены во втулке 2, установленной с возможностью перемещения и фиксации в заданном положении вдоль продольной оси датчика, благодаря чему обеспечивается регулирование зазора между плоскостью катушек 4 и 5 индуктивности и плоскостью ротора-экрана 8, вследствие чего изменяется чувствительность датчика. Изогнутые по дуге окружности каркасы и катушки индуктивности позволяют улучшить линейность характеристики преобразования датчика в заданном диапазоне измерения углов, составляющем ±75 , что также повышает тчзчность индуктивного датчика угловых перемещений. 2 ил. (Л
на 8. Благодаря этому изменяется пло- дз можностью перемещения вдоль оси датщадь перекрытия ротором-экраном 8 катушек А и 5 индуктивности, в следствие чего индуктивность одной катушки увеличивается, а другой уменьшается. Для регулировки чувствительности датчика изменяют зазор между поверхностями катушек и ротора-экрана, для чего отпускают стопорный винт 3 и пу- те;- пот .прота втулки 2, снабженной
0
чика и фиксации на заданном расстоянии от ротора-экрана втулкой для размещения в ней каркасов катушек индуктивности, которые выполнены изогнуты- мл по дуге окружности и размещены по одну cTopohy ротора-экрана в общей плоскости, ротор-экран выполнен в виде полудиска, а катушки индуктивности залиты гидроизолятором.
Фиа. 2
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Индуктивный преобразователь перемещений | 1974 |
|
SU628413A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
