4 ND
00 СО 01
HZKLnlr
Изобретение относится к землеройно- транспортным машинам с гидромеханической трансмиссией преимущественно цикличного действия, например бульдозерным агрегатам, и может быть использовано для разработки грунта как автономно, так и в составе автоматической системы управления рабочим процессом машин.
Цель изобретения - повышение надежности устройства.
На фиг. 1 изображен график зависимости Ц. (Л1„), где УТ - теоретическая скорость машины, М-н - момент нагрузки, соответствующий задаваемой заглублением рабочего органа силе тяги; на фиг. 2 - функциональная блок-схема устройства; на фиг. 3 - принципиальная схема блока задания последовательности операций; на фиг. 4 - принципиальная схема устройства.
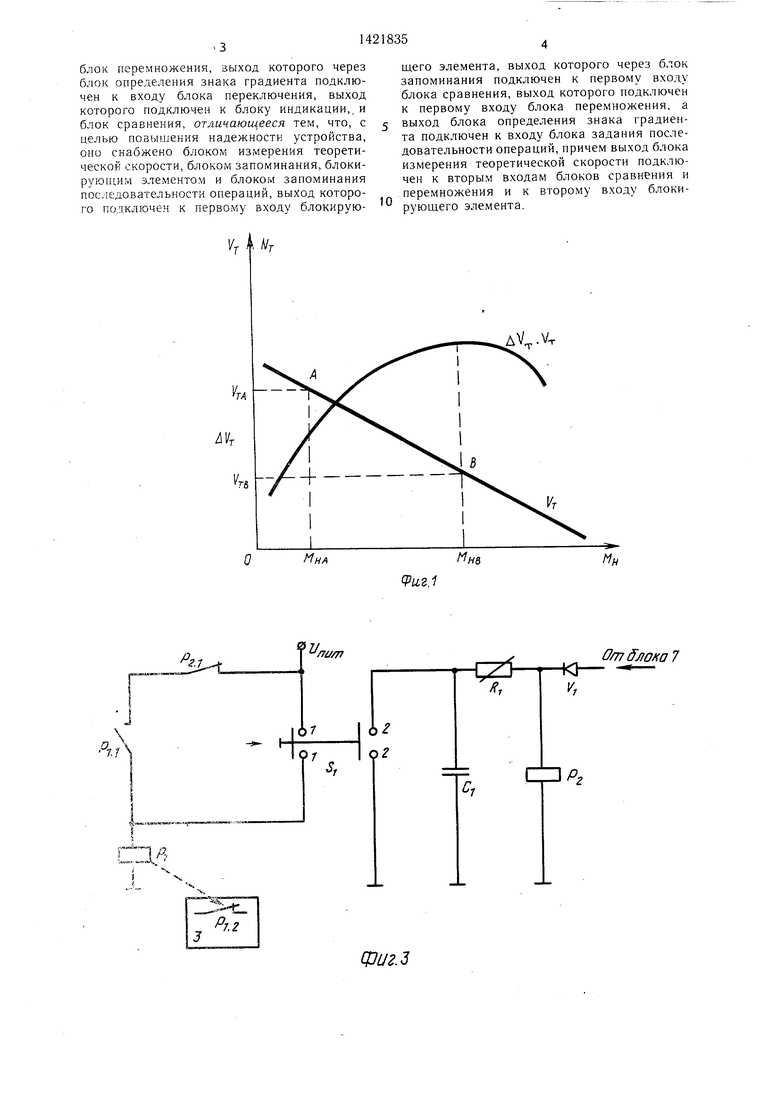
Устройство содержит блок 1 измерения теоретической скорости машины, блок 2 задания последовательности операций, блокирующий элемент 3, блок 4 запоминания, блок 5 сравнения, блок 6 перемножения, блок 7 определения знака градиента, блок 8 переключения, блок 9 индикации.
Устройство функционирует следующим образом.
После набора скоростного режима машины (точка А на фиг. 1) непосредственно перед началом заглубления оператор кратковременно воздействует на кнопку блока 2, который отключает блокирующий элемент 3. В этот момент происходит запоминание имеющегося сигнала на выходе блока 1, а на выходах блоков 5-7 при этом присутствует нулевой . сигнал, блок 8 отключен, индикаторы блока 9 не работают. После того, как оператор начинает заглубление рабочего органа, сигнал на выходе блока 5 увеличивается, на выходе блока 1 снижается, а на выходе блока 6 формируется сигнал, достаточно точно отражающий полезную тяговую мощность машины и аналогичный по характеру изменения от задаваемой силы тяги. До момента достижения экстремального режима на выходе блока 7 присутствует нулевой сигнал и состояние блоков 8 и 9 остается без изменений. В момент достижения экстремума (точка В на фиг. 1) градиент изменения результата перемножения AI/T-VT изменяет свой знак и на выходе блока 7 появляется единичный сигнал, который включает блок 8, а тот, в свою очередь, подает напряжение на индикаторы блока 9 и, если гидропривод с электроуправлением, отключает напряжение от каскада заглубления рабочего органа, тем самым прекращая заглубление.
Световой и звуковой индикаторы предписывают оператору прекратить заглубление, если гидропривод с ручным управлением. Сигнал с выхода блока 7 также поступает на вход блока 2, и при этом начинает работать цепь временной задержки. После
5
0
определенного промежутка времени, задаваемого предварительной настройкой, блок 2 посылает сигнал на включение блокирующего элемента 3, который пропускает к блоку 4 имеющийся в данный момент сигнал с бло- ка 1. При этом цепочка блоков 5-9 возвращается в первоначальное состояние, т. е. индикатор ы перестают работать. Указанный промежуток вре.мени задержки устанавливается таким, чтобы оператор успел среаги0 ровать на срабатывание индикаторов, и определяется nyTeivf предварительных экспер.и- ментов.
В пределах данного рабочего цикла устройство прекращает свою работу. В начале следующего рабочего цикла во время временного воздействия на кнопку блока 2 цепь временной задержки возвращается в первоначальное состояние и устройство полностью подготовлено к следующему рабочему циклу.
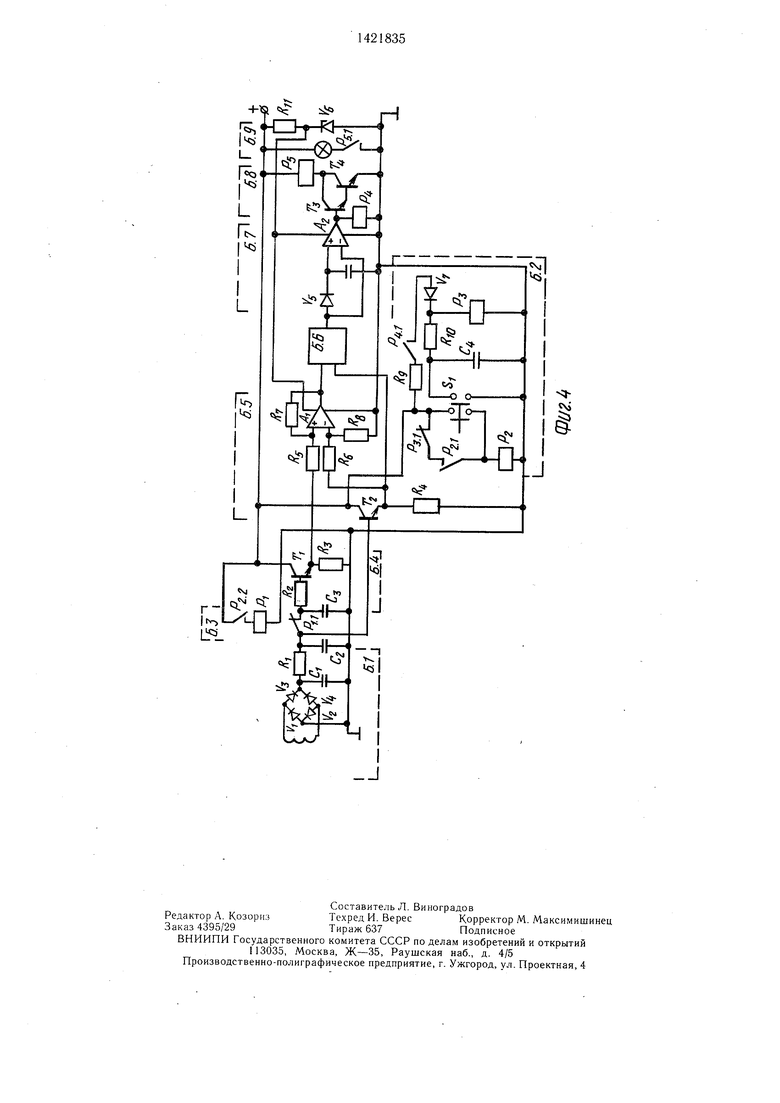
Схема блока 2 функц.чонкрует следующим образом.
В начале рабочего цикла оператор кратковременно нажимает кнопку 5.. Через контакты 1 - 1 срабатывает реле Р, тем самым замыкая первую пару своих нормально
5 разомкнутых контактов P,i, через которые и через нормально замкнутые контакты p9j реле р2 реле PI самоблокируется и остается включенны.м, несмотря на разомкнувшиеся контакты 1 -;. Реле Р через вторую пару своих нормально замкнутых контактов отключает блокирующий эле.мепт 3. В мо.мент нахождения экстремального режима на вход блока к диоду Vi поступает сигнал с блока измерения знака градиента. Реле f а срабатывает только после того, как произойдет заряд конденсатора Ci. для чего необходим промежуток времени С;, где R - элемент настройки. Срабатывая, реле Ро раз.мы- кает свои контакты Pi j, те.м самым обесточивая реле Р, а Р отключается, замыкает контакты PI.I,,размыкает контакты Ри и включает этим блокирующий элемент 3. В течение данного рабочего цикла конденсатор остается заряженным и реле,PI- включено. Перед началом следующего цикла оператор вновь нажимает кнопку Si, вновь включая реле PI, и в то же время замыкая
5 контакты 2-2 разряжает конденсатор C|. При этом реле отключается, разрывая свои контакты Pa.i. Далее блок задания последовательности операций и все устройство функционируют согласно описанному алгоритму.
.Таким образом, повышение надежности устройства обуславливает повышение эффективности землеройно-транспортной машины.
5
0
0
Формула изобретения
Устройство определения оптимального режима заглубления рабочего органа землеройно-транспортной машины, содержащее
блок перемножения, зыход которого через блок определения знака градиента подключен к входу блока переключения, выход которого подключен к блоку индикации,, и блок сравнения, отличающееся тем, что, с целью повышения надежности устрор1ства, оно снабжено блоком измерения теоретической скорости, блоком запоминания, блокирующим элементом и блоком запоминания последовательности операций, выход которого по.п.ключен к первому входу блокирующего элемента, выход которого через блок запоминания подключен к первому входу блока сравнения, выход которого подключен к первому входу блока перемножения, а выход блока определения знака градиента подключен к входу блока задания последовательности операций, причем выход блока измерения теоретической скорости подключен к вторым входам блоков сравнения и перемножения и к второму входу блоки
рующего элемента.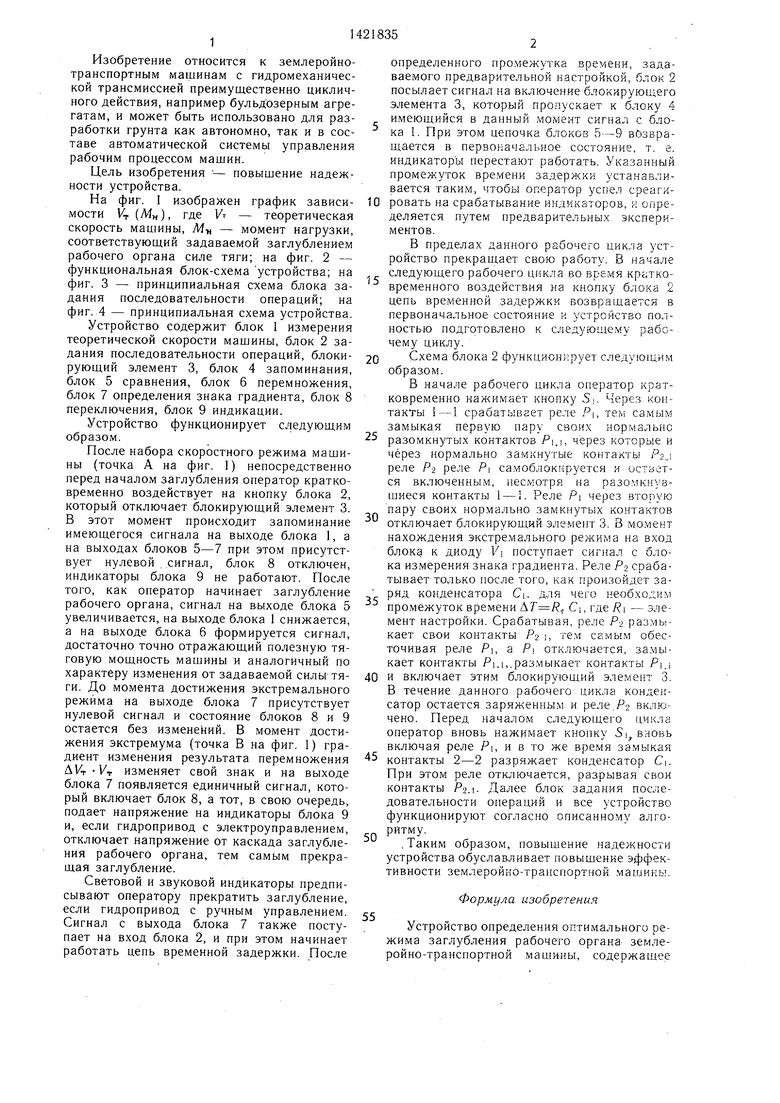
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1988 |
|
SU1579956A2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1416628A2 |
| Система управления гидроприводом рабочего органа землеройно-транспортной машины | 1985 |
|
SU1301943A1 |
| Способ регулирования рабочих процессов землеройно-транспортной машины | 1985 |
|
SU1315571A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1271951A1 |
| СКРЕПЕРНЫЙ АГРЕГАТ | 2005 |
|
RU2295610C2 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1982 |
|
SU1082914A1 |
| Устройство программного управления сменой клейм в головках клеймовочной машины | 1983 |
|
SU1130423A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ С ДИНАМИЧЕСКИ МОДИФИЦИРУЕМЫМ КОНТУРОМ | 1994 |
|
RU2109316C1 |
Изобретение относится к землеройно- транспортным машинам с гидромеханической трансмиссией циклического действия. Цель - повышение надежности устр-ва. Устр-во содержит блокирующий элемент 3 и блоки 1 измерения теоретической скорости машины, задания 2 последовательности операций, запоминания 4, сравнения 5, перемножения 6, определения 7 знака градиента, переключения 8 и индикации 9. Перед началом заглубления по сигналу с блока 2 отключается блокирующий эле.мент 3. И.меющийся на выходе блока 1 сигнал запоминается в блоке 4, а на выходах блоков 5-7 присутствует нулевой сигнал. Блок 8 отключен, индикаторы блока 9 не работают. При увеличении на выходе блока 5 сигнала на выходе блока 6 формируется сигнал, отражающий полезную тяговую мощность машины. В момент достижения экстремума на выходе блока 7 появляется единичный сигнал, который включает блок 8. Световой и звуковой индикаторы блока 9 подают сигнал на прекращение заглубления. Сигнал с выхода блока 7 поступает также на вход блока 2, который включает элемент 3. Он пропускает имеющийся в данный момент сигнал в блоке I к блоку 4. Блоки 5-9 при этом возвращаются в исходное состояние. 4 ил. S (Л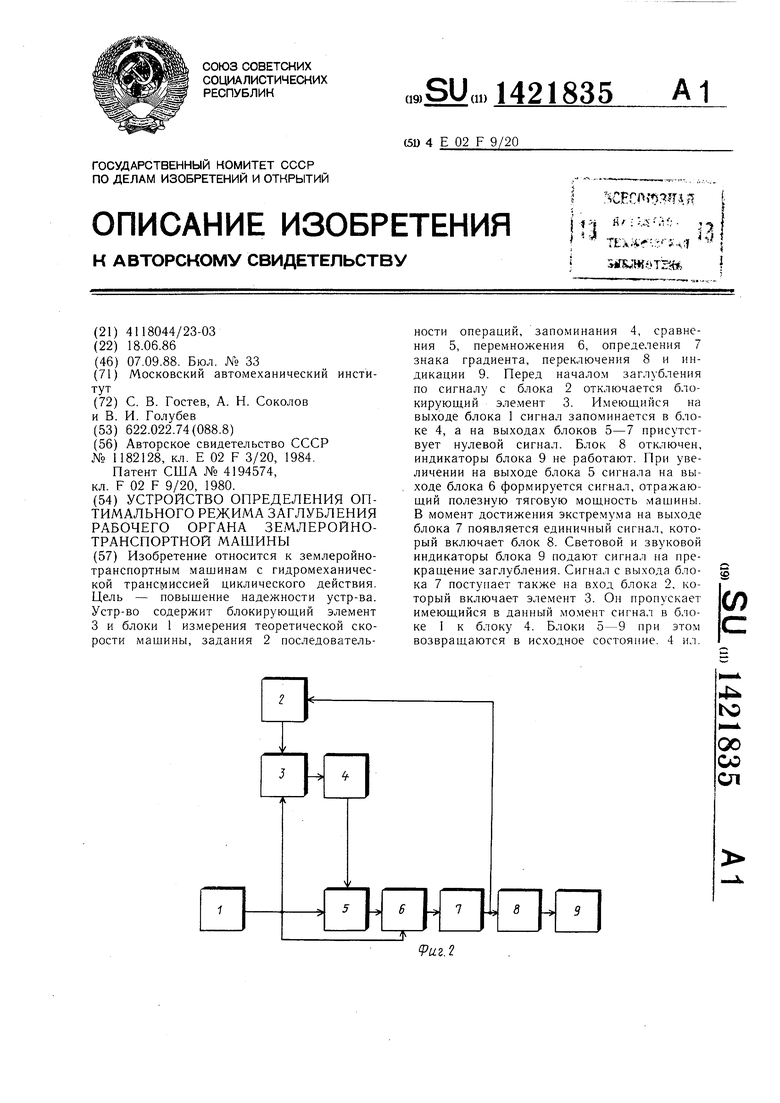
Vr
Л г
ТА
AVr
МНА
Мне
Мн
(а7
т: CZ1A
Фиг.
| Система автоматического управления отвалом бульдозера | 1984 |
|
SU1182128A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4194574, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
